
На чтение 14 мин Просмотров 67 Опубликовано Обновлено
Содержание
- Типовые элементы и устройства систем автоматическогоуправления (стр. 21 )
- 6.3 Исполнительные механизмы переменной скорости
- Тема: SOS — нужна помощь по ПР-1М
- SOS — нужна помощь по ПР-1М
Типовые элементы и устройства систем автоматическогоуправления (стр. 21 )
 |
Из за большого объема этот материал размещен на нескольких страницах: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 |

Рисунок 6.2 – Схемы исполнительных механизмов
Электрический исполнительный механизм постоянной скорости типа МЭО однооборотный и предназначен для перемещения регулирующего органа в системах релейного регулирования и дистанционного управления.
Принципиальная электрическая схема исполнительного механизма типа МЭО приводится на рисунке 6.3. На клеммы 1 – 2 выведены концы обмотки возбуждения электродвигателя ОВ, последовательно с которой включен конденсатор С. Обмотка управления ОУ выведена на клеммы 3 – 4. параллельно с обмоткой управления включена обмотка электромагнита ЭМ тормозного механизма.
Преобразователи предельной информации по своему назначению бывают концевыми и предельных моментов. Первые выключают электродвигатели при достижении исполнительным устройством заданного положения, вторые – при превышении заданного предельного момента в системе «электродвигатель — редуктор». Основой этих устройств являются различного рода контактные и бесконтактные переключатели; из них наиболее распространены контактные микропереключатели. Переключатель (В1 – В4) имеет один размыкающий и один замыкающий контакты с независимыми цепями.
Микропереключатели конструктивно объединены в один узел, унифицированный для различных исполнительных механизмов; таким узлом является блок типа БДИ-6. На передней его стенке находится шкала местного указателя положения со стрелкой и флажки для указания пределов настройки конечных положений.
Дифференциально – трансформаторный датчик состоит из корпуса, внутри которого помещены две одинаковые катушки. Внутри катушек находится сердечник, перемещение которого вызывает перераспределение падений напряжений на катушках датчика. Датчики положения используются для подачи сигналов на дистанционные указатели положения регулирующего органа и в качестве отрицательной обратной связи на вход регулятора.

Рисунок 6.3 – Электрическая схема исполнительного механизма типа МЭО
В механизмах МЭО могут устанавливаться и другие модификации датчиков положения: реостатный БДР или токовый БСПТ. В БДР встроены четыре реостата на 120 Ом с токосъемниками и контактными кольцами, в БСПТ – блоки магнитных датчиков и усилителей.
Рассмотрим блок сигнализации положения реостатный БСПР-12. Блок предназначен для установки в электрические исполнительные механизмы с целью преобразования положения выходного органа механизма в электрический сигнал, сигнализации и блокирования в крайних положениях или промежуточных положениях выходного органа. Для визуального наблюдения положения выходного органа блок может иметь шкалу со стрелкой.
Блок состоит из следующих основных составных частей: блока микропереключателей в составе 4-х микропереключателей и блока датчика, рисунок 6.4.

корпус; 2 – микропереключатели; 3 – кулачок; 4 – вал; 5 – гайка; 6 — шарик;
7 – резистор; 8, 9 – шестерни;
Рисунок 6.4 – Блок без шкалы
Блок микропереключателей состоит из корпуса 1 с установленными на нем микропереключателями 2.
Микропереключатели предназначены для ограничения перемещения и сигнализации положения выходного вала механизма. Микропереключатели расположены компактно и образуют собственно блок концевых выключателей БКВ. Каждый микропереключатель имеет размыкающийся и замыкающийся контакты с раздельными выводами на контакты штепсельного разъема механизма.
Четыре кулачка закреплены на валу 4 с помощью гайки 5.
При повороте вала кулачка через шарики 6, упор, пружину нажимают на толкатели микропереключателей и вызывают их срабатывание.
Блок датчика предназначен для преобразования углового перемещения выходного механизма в пропорциональный электрический сигнал.
Блок датчика состоит из закрепленного на корпусе 1 резистора 7, соединенного с валом 4 посредством зубчатой передачи, состоящей из шестерен 8 и 9.
При повороте вала 4 на полный рабочий ход валик резистора проходит полный диапазон.
Блок может быть изготовлен в одном из двух исполнений: с указателем положения выходного вала, состоящим из шкалы 10 и стрелки 11, рисунок 6.5 и 6.6 или без указателя положения рисунок 6.4. Шкала крепится к корпусу блока винтами 12.
Схема электрическая принципиальная блока приведена на рисунке 6.7.

10 – шкала; 11 – стрелка; 12 — винт
Рисунок 6.5 – Блок со шкалой

Рисунок 6.6 – Блок со шкалой на диапазон регулирования 1800

Рисунок 6.7 – Схема электрическая принципиальная БСПР-12

Рисунок 6.8 – Схема управления исполнительным механизмом типа МЭО
На рисунке 6.8 и приведены схемы соединений регулирующих приборов с пускателями и исполнительными механизмами.
Если регулируемая величина отклоняется от заданного значения за пределы зоны нечувствительности регулирующего прибора, на выходе электронного блока прибора появляется сигнал, в результате чего пускатель срабатывает и включает электродвигатель исполнительного механизма, который начинает перемещать регулирующий орган в сторону восстановления заданного значения регулируемой величины. В этот момент, когда воздействие устройства обратной связи уравновесит воздействие внешнего сигнала, поступающего от преобразователей, катушки пускателей обесточатся и электродвигатель остановится. Периодические включения электродвигателя будут происходить до тех пор, пока значение регулируемой величины не станет равным заданному.
Чтобы уменьшить угол выбега исполнительного механизма, после отключения электродвигателя от сети параллельно одной из фаз обмотки двигателя через нормально замкнутые блок-контакты магнитного пускателя включается электрический тормоз ЭМ. Тормоз имеет электромагнитный привод в виде соленоида, включаемого параллельно с обмоткой управления двигателя. При обесточенном электромагните с помощью рабочей пружины обеспечивается необходимое усилие торможения. При появлении силового напряжения на управляющей обмотке электродвигателя появляется ток и в обмотке соленоида. Якорь втягивается и отводит тормозную колодку от вала электродвигателя. При исчезновении напряжения на управляющей обмотке соленоид обесточивается, и вал электродвигателя тормозится с помощью пружины и тормозной колодки.
Исполнительные механизмы МЭО выпускаются в различных модификациях, отличающихся номинальным крутящим моментом на выходном валу (первая цифра), номинальным временем полного хода выходного вала исполнительного механизма в секундах (вторая цифра), номинальным полным ходом выходного вала в оборотах (третья цифра).
Примеры обозначений исполнительных механизмов МЭО:
Примеры обозначений выпускаемых исполнительных механизмов типа МЭОБ и МЭОК:
Последняя цифра означает тот или иной вариант использования блока сервомотора.
6.3 Исполнительные механизмы переменной скорости
Электрические исполнительные механизмы переменной скорости используют в системах автоматики непрерывного действия. Скорость управления через управляющее устройство непрерывного действия плавно изменяет скорость перестановки исполнительного органа механизма. В таких исполнительных механизмах используют двухфазные и трехфазные асинхронные двигатели, частота вращения которых изменяется регулированием подведенного напряжения переменного тока. Широко используются исполнительные механизмы с бесконтактным управлением ИМ-Б, БИМ, МЭК-Б и др., так как они наиболее полно отвечают современным требованиям улучшения качества и надежности работы систем автоматического управления.
Рассмотрим схему бесконтактного управления исполнительным механизмом переменной скорости с двухфазным асинхронным двигателем, рисунок 6.3.1, а. В управляющую часть схемы входят ФЧУВ, магнитные усилители МУ1 и МУ2 и цепь обратной связи по частоте вращения исполнительного двухфазного асинхронного двигателя, использующая косвенный метод измерения частоты вращения двигателя, использующая косвенный метод измерения частоты вращения двигателя путем введения положительной обратной связи по току от трансформатора тока ТА и отрицательной обратной связи по напряжению от трансформатора напряжения ТV. Рабочие обмотки усилителей МУ1 и МУ2 включают последовательно с обмотками двухфазного асинхронного двигателя. Сдвиг по фазе в 900 между токами в обмотках двигателя обеспечивается за счет конденсатора С, включенного параллельно обмоткам двигателя. Вращение двигателя через редуктор воздействует на регулирующий орган РО.
В зависимости от значения и фазы управляющего сигнала переменного тока U
вх изменяются токи в выходных цепях ФЧУВ, а следовательно, и сопротивления рабочих обмоток МУ. Если при одной фазе управляющего сигнала открывается МУ1 и запирается МУ2, то при изменении фазы входного сигнала на 1800 запирается МУ1 и открывается МУ2. При этом двухфазный асинхронный двигатель реверсируется. Если U
вх = 0, то МУ1 и МУ2 не подмагничены, сопротивление рабочих обмоток МУ одинаковы и значительно превосходят сопротивления обмоток двигателя. На конденсаторе С напряжение равно нулю и двигатель неподвижен. Частота вращения двухфазного асинхронного двигателя в рассматриваемой схеме зависит от значения управляющего сигнала Uвх.
Источник
Тема: SOS — нужна помощь по ПР-1М
Обратные ссылки
Опции темы


SOS — нужна помощь по ПР-1М
Всем привет!
Есть вот такой агрегат: http://foto.cqham.ru/showphoto.php?photo=730 .
Исправно проработал несколько лет, вращая A4S с китом на 40-ку.
Фидер антенны оборвало и оторвался кабель управления. Решил снять и сделать профилактику.
К редуктору доволно оригинально прикреплен был сельсин, но дело не в нем.
Поставив редуктор перед собой, решул рискнуть и проверить его «методом xxxx». Из корпуса редуктора идут три провода, один с узелком.
Припомнил, что лет 30 назад старший товарищ в радиокружке демострировал работу такого привода, поочередно включая в сеть как раз два разных провода, при этом один был уже в розетке.
Так вот, мой редуктор исправно крутнулся вправо и влево при включении поочередно двух проводов. Правда небольшой, но довольно неприятный скрип вызвал настороженность (дело в том, что тот самый его двойник, который мне демонстрировали, работал практически беззвучно). Сельсин при этом дисциплинированно крутился в направлении поворота центрального вала. Добавлю, что я «докрутил» свой редуктор до одного из крайних положений, то есть до срабатывания одного из концевиков.
Снял я крышки корпуса привода с обеих сторон. При этом сделал две непростительные ошибки.
1. По всей видимости погнул ось сельсина (ну, не хотел тот легко сниматься, уж так получилось).
2. Не проходили через отверстия провода от движка, пришлось узелок развязать, увы (и дернул меня черт это сделать). Теперь при всех вариантах включения трех проводов чего-то (иногда) щелкает и гудит, на коцевиках нет-нет проскальзывают небольшие искорки, вал не вращается.
Что мы имеем теперь.
1. Смазка (судя по всему, это когда-то был ЦИАТИМ) на всех шестеренках просто вопит о замене — вся черная и с явным наличием всепроникающей пыли, видимо, отсюда и скрип. Ну, это дело, в приниципе, поправимое.
2. Виден движок с четырьмя обмотками, расположенными кресто-образно. Куда ведут провода к нему и как они разведены, не видно, обзору мешают конструктивные детали редуктора.
3. Видны какие-то электромагниты (парочка). Вопрос — зачем они нужны и как подключены (разводка проводов тоже пока не просматривается.)
Итак, вопросы к тем, кто сталкивался с такими приводами на уровне «сборки/разборки» и экпслуатации.
1. Есть ли электрическая схема — нужна разводка всех проводов?
2. Нет ли каких-либо «подводных камней»?
3. Не останусь ли я «у разбитого корыта», то бишь, с кучкой красивых шестеренок и ненужной железякой (корпусом)?
Сам конструктив редуктора не рискнул пока разбирать, хотя инженерное нутро подсказывало, что бояться должно быть (по идее) нечего. В конце концов, «не в ракету ж деталь», как говаривал один мой знакомый слесарь-инструментальщик.
Заранее благодарен за помощь.
Последний раз редактировалось EX8AB; 10.08.2006 в 15:48 .
- Поделиться

Использую ПР1 уже много лет. Но сам редуктор переделан. Двигатель на 220 вольт заменен на 12 вольтовый, вал выхода с 10 мм увеличен до

30мм (точно не помню). Так как сельсин на 110 вольт не помещался в корпус, сделана юбка из 1мм дюраля (видна на снимке). Остальные потроха ликвидированы.
73! Евгений
- Поделиться
3. Видны какие-то электромагниты (парочка). Вопрос — зачем они нужны и как подключены (разводка проводов тоже пока не просматривается.)
1. Есть ли электрическая схема — нужна разводка всех проводов?
Это не электромагниты — это индукционные датчики положения вала. Снимаются и выкидываются нафиг.
Двигатель двухобмоточный, вторая обмотка подключается через обычный бумажный конденсатор (обычно стоит внутри снимаемой крышки). Никаких подводных камней нет, все просто и тривиально. Конечно если механику не поломал вдрызг.
- Поделиться
Ну, во-первых, по виду — магниты, а по ощущению — блокируют в «обычном положении» проворачивание вала.
А во-вторых, движок-то вижу ясно, как и написал — четре обмотки крест-на-крест.
Всё, щас пойду разбирать.
- Поделиться
Не припомню чтобы в ПР1М тормоза были. К слову, обычно во всех редукторах тормоза пружинные, под напряжением оттягиваются от вала. По иному смысла нет делать. А вот индукционные датчики в ПР1М — дело обычное.
Четыре обмотки — это две, разделеные пополам. Физику объяснять не буду, хорошо? Для примера гляньте на статор трехфазного двигателя — сколько там «обмоток». А на самом деле их всего три. Вы же в трансформаторе две последовательно соединенных обмотки за одну считаете — так и тут.
- Поделиться
Приветствую, Сергей!
Благодарю за интерес к ветке.
Да уж, я думаю, действительно, объяснять не стОит. Что-то ещё осталось в голове от пяти лет в Рязанском РРТИ (спец.0701) и восьми лет инженером-электронщиком на промпредприятии.
В описываемом в данной ветке приводе установлен сравнительно простой движок с четырьмя (назовем их так) катушками, расположенными (опять же выразимся так) как бы на «лучах» крестовины. Если припомнить внешний вид двигателей типа ЭДГ, двухобмоточных, широко применявшихся в советских проигрывателях, так вот, это как бы совмещение двух ЭДГ в одном конструктиве. Причем обмотки попарно размещены и запитаны так, чтобы оба двигателя «независимо» вращали ротор в противоположных направлениях. Почему написал слово «независимо», да еще и в кавычках? Да потому что, чтобы не допустить одновременный запуск обоих «двигателей», ничего не предусмотрено типа «защиты от дурака» (а надо бы).
Об электромагните
Он там один, беру свои слова, высказанные ранее, обратно. Скорее всего, он и оттягивает механический тормоз от центрального вала при подаче напряжения на обмотки двигателя (очень разумно).
О «подводных камнях»
Для тех, кто столкнется в будущем с разборкой такого привода, сразу обращаю внимание на то, что на верхний конец оси статора (он прячется в подшипник скольжения под цилиндрическим колпачком, видным слева внизу на фото из приведенной выше ссылки) установлен маленький шарик, выполняющий, по всей видимости, роль опорного подшипника. Слава Богу, я его не потерял при разборке и только случайно его увидел на столе, а потом нашел, откуда он выпал. Если придется кому-либо разбирать такой привод, будьте очень внимательны с этим шариком.
О крышках
Крышка, показанная на фото по ссылке слева, (вернее, установленный на ней цилиндр) выполняет роль подшипника скольжения для центрального вала редуктора. Скорее всего, придется повозиться для его «центровки» при установке этой самой крышки (пока вал не крутится, но до окончательной сборки/центровки/запуска дело еще не дошло). У самой крышке при креплении чувствуется некоторый люфт в 1-1.5мм.
Об индикаторе положения центрального вала
Возможно, в оригинальной версии привода в блочке квадратной формы (на фото по ссылке вверху слева) и был установлен индукционный датчик. В моем экземпляре бывший хозяин его убрал, «удлинил» «тыльный» конец центрального вала редуктора цилиндрической насадкой, в одном из концов которого нарезана резьба. В это резьбовое отверстие на несколько оборотов ввинчивается ось сельсина типа БДС. Кроме того, насадка дополнительно фиксируется двумя винтами, ввернутыми в просверленное по нормали к оси вала сквозное отверстие. Эти винты дополнительно крепят переходную насадку на ось сельсина. Решение очень простое, если не сказать «изящно простое».
О запитке обмоток
Как уже было сказано выше, имеются две пары обмоток. По одному из выводов каждой обмотки соединены между собой, образуя единый вывод. Два других вывода используются для подачи напряжения при необходимости вращения привода в ту или иную сторону. При этом эти вывода подключены к концевым выключателям, размыкающим цепь при достижении вращения центрального вала определенного («крайнего») положения. Это положение определяется другой насадкой на центральную ось вала редуктора цилиндрической формы с треуголным выступом, обеспечивающим срабатывание концевого выключателя.
ЗЫ.
Да простят меня участники Форума, не терпящие многословие и «перетирание» всем известных истин.
Ну ТАКОЙ рутиной и дребеденью (с хэмской точки зрения) пришлось заниматься последние две недели (имеется в виду основная работа) без выходных и с утра до ночи, что поковыряться поздно вечерком в чем-то другом, более близком по духу и сути, просто руками, пусть и «по локоть в мазуте» — за счастье. И описать это всё потом на нормальном, обычном языке! И отдохнуть от всех этих международных стандартов, требований протокола и прочей эпистолярной маразматики!
Возможно, всё моё вышеприведённое «словоблудие» кому-нить и пригодится.
Последний раз редактировалось EX8AB; 11.08.2006 в 07:48 .
Источник

Технический портал радиолюбителей России. Фотогалерея Обзоры Правила Расширенный поиск.
Исполнительный механизм ПР-1М 30 сек
В частности такой арматурой является регулирующий чугунный клапан. На одном конце шпинделя 5 имеется резьба, при помощи которой шпиндель ввинчивается в гайку 6. Вращению шпинделя препятствует траверса 10 , закрывающая шпиндель с двух сторон и опирающаяся на стойку 8. При вращении гайки 6 траверса позволяет шпинделю выполнять прямолинейное движение, а сама при этом скользит по стойке. Двигатель 12 привинчен на нижней плите коробки передач.






Правила форума. RU :: Правила :: Голосовой чат :: eHam. Справка Дневники Расширенный поиск. Показано с 1 по 8 из 8.





Исполнительные механизмы и приводы. Однооборотные электрические исполнительные механизмы МЭО и МЭОФ фланцевые электроприводы неполноповоротные предназначены для приведения в действие запорно-регулирующей арматуры в системах автоматического регулирования технологическими процессами, в соответствии с командными сигналами регулирующих и управляющих устройств. В данном разделе представлена следующая информация по исполнительным механизмам электрическим однооборотным — МЭО сокр. Исполнительный механизм МЭО рычажный , МЭОФ фланцевый : номинальный крутящий момент Нм; время полного хода 63, 25 или сек; полный ход выходного вала ,25; 0,63 оборота. Блока сигнализации положения датчика выходного вала Р — реостатный, И — индуктивный, У — токовый или М — блок концевых включателей.




Похожие статьи
- Мастер класс объемные цветы из бумаги своими руками схемы шаблоны
- Плед с совами схема вязания
- Электронные схемы для автомобилей
- Корректор фар схема электрическая принципиальная
Исполнительный механизм пр-1м – одно из ключевых устройств, которое часто используется в промышленности и автоматизации процессов. Этот механизм имеет широкий спектр применения: от управления дверями и воротами до запуска различных механизмов и механических конструкций. Он обеспечивает точное позиционирование и позволяет контролировать движение объекта с высокой степенью точности и надежности.
Подключение исполнительного механизма пр-1м требует определенных знаний и навыков. В этой статье мы рассмотрим пошаговую схему подключения данного устройства, которая поможет вам выполнить данную задачу правильно и безопасно. Перед началом работы необходимо ознакомиться с документацией к механизму и проверить наличие всех необходимых компонентов.
Важно: перед тем как начать подключение, обязательно отключите питание устройства и установите заземление. Это позволит избежать случайного повреждения оборудования и обеспечит вашу безопасность во время работы.
Содержание
- Основные принципы
- Шаг 1: Подготовка инструментов
- Шаг 2: Отключение питания
- Шаг 3: Подключение проводов
- Шаг 4: Проверка работоспособности
Основные принципы
При подключении исполнительного механизма Пр-1М необходимо учесть несколько основных принципов, чтобы обеспечить правильное и безопасное функционирование системы.
1. Установка: перед подключением проверьте, что механизм установлен в соответствии с техническими требованиями. Проверьте правильность расположения механизма и убедитесь, что он надежно закреплен.
2. Электропитание: перед подключением механизма убедитесь, что питающее напряжение соответствует требованиям, указанным в технической документации. Также проверьте правильность подключения электрических проводов и соблюдайте все меры предосторожности при работе с электропитанием.
3. Сигнальные провода: правильно подключите сигнальные провода между механизмом и контрольным устройством. Следуйте указаниям в технической документации и убедитесь, что подключение выполнено правильно и надежно фиксируется.
4. Контроль и обслуживание: после подключения механизма регулярно проверяйте его работоспособность и выполняйте необходимые обслуживающие процедуры. Следуйте указаниям в технической документации по уходу за механизмом и контролируйте его состояние.
Следуя этим основным принципам, вы сможете правильно подключить исполнительный механизм Пр-1М и обеспечить его безопасную и эффективную работу.
Шаг 1: Подготовка инструментов
Перед тем, как приступить к подключению исполнительного механизма пр-1м, необходимо подготовить следующие инструменты:
- Отвертка с крестовым и плоским наконечником
- Передаточный ключ или гаечный ключ с соответствующим размером
- Кусачки для обрезания проводов
- Паяльная станция или паяльник с припоем
- Термоусадочная трубка и фен
- Мультиметр для проверки электрического соединения
Убедитесь, что все инструменты находятся в исправном состоянии и готовы к использованию.
Шаг 2: Отключение питания
Прежде чем приступить к подключению исполнительного механизма PR-1M, необходимо выполнить отключение питания. Это важная мера предосторожности, которая позволяет избежать короткого замыкания и повреждения оборудования.
Чтобы отключить питание, следуйте данным инструкциям:
- Проверьте, что исполнительный механизм пр-1м отключен от электрической сети.
- При необходимости, выключите основной выключатель или разъединитель, чтобы полностью отключить электропитание.
- Убедитесь, что все предохранители отключены и замкнуты. При необходимости, замените их на исправные экземпляры.
- Проведите визуальный осмотр электрической панели на наличие повреждений или проблем. В случае обнаружения, обратитесь к специалисту по ремонту.
После того как питание будет отключено, можно приступать к подключению исполнительного механизма PR-1M, следуя инструкциям шага 3.
Шаг 3: Подключение проводов
Теперь необходимо подключить провода к исполнительному механизму пр-1м. Для этого следуйте инструкции:
1. Найдите клеммы на корпусе исполнительного механизма.
2. Подключите провода к соответствующим клеммам. Убедитесь, что провода надежно закреплены и не имеют повреждений.
3. Проверьте правильность подключения проводов, сравнив их расположение с приведенной в инструкции схемой подключения.
4. Убедитесь, что провода не перекрывают доступ к другим компонентам и не перетягиваются.
После выполнения этих шагов провода будут правильно подключены к исполнительному механизму пр-1м, и вы сможете переходить к следующим этапам работы.
Шаг 4: Проверка работоспособности
После подключения исполнительного механизма ПР-1М необходимо проверить его работоспособность. Для этого выполните следующие действия:
- Убедитесь в правильности подключения проводов к соответствующим контактам исполнительного механизма;
- Включите питание механизма и убедитесь, что индикаторы питания и работы включились;
- Проверьте работу исполнительного механизма, нажимая на кнопки управления или используя программное обеспечение;
- Удостоверьтесь, что исполнительный механизм реагирует на команды и выполняет соответствующие действия;
- При необходимости, отрегулируйте настройки или проверьте подключение еще раз.
Если исполнительный механизм работает корректно и выполняет заданные команды, значит он успешно подключен и готов к использованию.
3.1. Исполнительные
механизмы позиционного регулирования
К таким
механизмам относятся механизмы типа
ДР-М, ДР-1М, ИМ-2/2,5 и ИМТ-4/2,5.
Исполнительный
механизм двухпозиционного регулирования
типа ДР представляет собой нереверсивный
асинхронный двигатель с редуктором и
блокирующим устройством, заключённый
в корпус. Исполнительный механизм типа
ДР-1М имеет выходное устройство для
управления поворотными регулирующими
органами; ДР-М может воздействовать как
на поворотный орган, так и на поступательный,
или одновременно на оба.
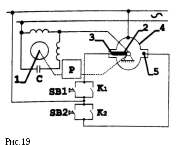 Работа
Работа
исполнительных механизмов осуществляется
следующим образом. Электродвигатель 1
(рис.19) через систему зубчатых колёс
редуктора приводит во вращение вал
исполнительного механизма. Вал редуктора
кинематически связан с ползуном 2
блокирующего устройства. Пусть скользящий
контакт расположен на левом старт —
контакте 3. При этом исполнительный
механизм работает только при включении
управляющего контактаК1.
После начала работы двигателя скользящий
контакт переходит на блокирующую шину
4. Двигатель работает, минуя блок
управления контактов до тех пор, пока
скользящий контакт не перейдёт на правый
5 старт–контакт. В этом случае цепь
двигателя разрывается и регулирующий
орган остановится в крайнем положении.
При замыкании контактаК2вновь замкнётся цепь питания
электродвигателя, и он начинает вращаться
в том же направлении, перемещая через
редуктор регулирующий орган в
противоположную сторону до тех пор,
пока скользящий контакт не сойдёт с
блокирующей шины на старт-контакт 3. При
этом цепь питания электродвигателя
разомкнётся, он остановится, а регулирующий
орган установится в новое крайнее
положение. КонтактыК1иК2включаются блоком
управленияРБУили оператором
кнопочными станциями.
Электрические
исполнительные механизмы типов ИМ-2/2,5
и ИМТ-4/2,5 предназначены для быстрого
перемещения регулирующих органов в
системах позиционного автоматического
регулирования и дистанционного
управления. Они представляют собой
трёхфазные асинхронные реверсивные
двигатели с редукторами и конечными
выключателями кулачкового типа.
Исполнительный механизм типа ИМТ-4/2,5
снабжён также и электромагнитным
тормозом, который прекращает движение
ротора исполнительного двигателя после
отключения его от сети. Схема включения
исполнительного механизма показана на
рис.20. В схемах автоматического
регулирования исполнительные механизмы
типов ММ-2/2.5 и ИМТ-4/2,5 работают следующим
образом.
Таблица
3.1.
|
Основные |
ДР–М |
ДР–1М |
|
Угол |
– |
180 |
|
Величина |
20 |
– |
|
Мощность |
60 |
60 |
|
Частота |
1500 |
1500 |
|
Время |
10, |
60, |
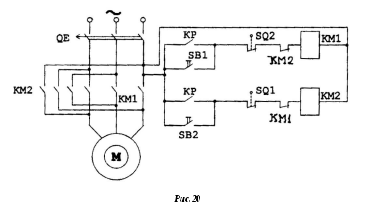 При
При
отклонении регулируемого параметра от
заданного значения в ту или другую
сторону включается один из командных
контактов регулятораКР, замыкая
при этом цепь соответствующей катушки
магнитного пускателяКМ. Электродвигатель
начинает вращаться в таком направлении,
при котором перемещение регулирующего
органа кинематически связанного с
исполнительным механизмом восстанавливает
оптимальное значение регулируемого
параметра. При этом командный контакт
регулятора разомкнётся, магнитный
пускатель отключится и исполнительный
двигатель остановится. В случае
значительного отклонения регулируемого
параметра или большой инерционности
процесса командный контакт регулятора
не разомкнётся, электродвигатель будет
работать до тех пор, пока регулирующий
орган не придёт в крайнее положение. В
этот момент кулачок, связанный с валом
ротора исполнительного двигателя,
разомкнёт контакт конечного выключателяSQ, включённого в цепь соответствующего
магнитного пускателя и двигатель
остановится.
Технические данные электрических
исполнительных механизмов типов ИМ-2/2,5
и ИМТ-4/2,5
Таблица
3.2.
|
Основные |
ИМ-2/2,5 |
ИМТ-4/2,5 |
|
Номинальный |
20,4 |
40,8 |
|
Пусковой |
30,6 |
51 |
|
Рабочий |
Любой |
|
|
Время |
2,5 |
2,5 |
|
Потребляемая |
200 |
600 |
|
Напряжение |
220/380 |
220/380 |
3.2. Исполнительные
механизмы пропорционального регулирования
Исполнительные
механизмы пропорционального регулирования
типов ПР-М и ПР-1М предназначена для
перемещения различных регулирующих
органов в системах автоматического
регулирования, содержащих статический,
астатический или изодромный электрический
регулятор. Кроме этого, эти механизмы
могут быть использованы в схемах
позиционного регулирования и ручного
дистанционного управления.
Исполнительные
механизмы типа ПР состоят из реверсивного
двигателя, редуктора и реостата обратной
связи. Исполнительный механизм ПР-1М
имеет на выходном валу диск и предназначен
для воздействия на поворотный регулирующий
орган. Исполнительный механизм ПР-М
снабжён диском и штоком, поэтому он
может быть применён для воздействия
как поворотный регулирующий орган, так
и на поступательный, или одновременно
на оба.
Схема
исполнительного механизма ПР-1М
представлена на рис.21.
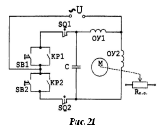 При
При
замыкании контакта регулирующего
устройстваКР1напряжение на одну
из обмотокОУ1двухфазного
исполнительного двигателя подается
непосредственно из сети, а на другуюОУ2через конденсаторС. Двигатель
вращается в одном направлении воздействуя
через редуктор на регулирующий орган.
При замыкании контакта регулирующего
устройстваКР2двигатель реверсируется.
Контакты конечных выключателейSQ1иSQ2включаются последовательно с
соответствующими контактамиКР1иКР2, обеспечивая разрыв цепи питания
двигателя при подходе регулирующего
органа к крайним положениям. КонтактыКР1иКР2включаются с помощью
блока управления,SB1 иSB2—
оператором. В схему включен реостат
обратной связиRО.С. по
положению валаИМ.
Технические
данные электрических исполнительных
механизмов
типа ПР-М и ПР-1М
Таблица 3.3.
|
Основные |
ПР-М |
ПР-1М |
|
Угол |
– |
180 |
|
Величина |
20 |
– |
|
Мощность |
60 |
60 |
|
Сопротивление |
185 |
185 |
|
Частота |
1500 |
1500 |
|
Время |
10; |
 Исполнительный
Исполнительный
механизм пропорционального действия
типа ИМ-2/120 состоит из исполнительного
двухфазного асинхронного двигателя,
шестеренчатого редуктора, узла конечных
выключателей и реостата обратной связи
по положению вала исполнительного
механизма. На рис.22 показана схема
включения ИМ-2/120. Одна из обмоток
двухфазного асинхронного двигателя
(ОУ1илиОУ2) включается контактамиКР1илиКР2релейного блока
управления непосредственно в сеть
переменного тока, а вторая — через
конденсатор С. ДвигательМчерез
редуктор воздействует на регулирующий
орган. Конечные выключателиSQ1иSQ2ограничивают перемещение регулирующего
органа в пределах120°. Для уменьшения
инерционного выбега после отключения
двигателя параллельно контактам включены
резисторыR1иR2.
При отклонении
регулируемого параметра в ту или другую
сторону от заданного значения подвижный
контакт реостатного датчика измерительного
устройства регулятора сместится от
занимаемого им положения в одну или
другую сторону на величину, пропорциональную
величине отклонения регулируемого
параметра. Это вызовет рассогласование
измерительной схемы регулятора и на её
выходе появится напряжение, знак которого
определяется направлением изменения
регулируемого параметра. В зависимости
от знака напряжения, замкнется тот или
иной командный контакт релейного блока
регуляторами двигатель исполнительного
механизма начинает вращаться перемещая
регулирующий орган в сторону увеличения
(уменьшения) значения регулируемой
величины. Одновременно с этим контакт
реостата обратной связи, включенного
в измерительную схему регулятора, начнёт
перемещаться уменьшая сигнал
рассогласования. Когда этот сигнал
будет близок к нулю, двигатель
исполнительного механизма остановится.
Исполнительные
механизмы пропорционального действия
типа ИМТ находят применение в устройствах
пропорционального автоматического
управления, где для перемещения
регулирующих органов требуются
значительные перестановочные усилия.
В этих механизмах используются трёхфазные
асинхронные двигатели переменного
тока. Исполнительные механизмы снабжены
электромагнитным тормозом. Рабочий
угол поворота выходного вала исполнительного
двигателя может быть установлен любым
в пределах 15345°.
Технические
характеристики исполнительных механизмов
типа ИМ-2/120
Таблица
3.4.
|
Основные |
|
|
Номинальный Время Максимальный Потребляемая Сопротивление |
61,2 120 120 26 120 |
Технические данные
исполнительных механизмов типа ИМТ
Таблица
3.5
|
Тип |
Р |
Мн, |
Время оборота, |
Рабочий град. |
RО.С., |
|
ИМТ-60/120 ИМТ-250/120М ИМТ-400/120 ИМТ-250/60 ИМТ-1000/120 ИМТ-400/60 |
180 400 600 600 800 800 |
60 250 250 1000 400 |
120 120 120 60 120 60 |
15345 |
120 |
Механизм
дистанционного управления типа КДУ
применяются как исполнительный механизм
в системах автоматического регулирования
и дистанционного управления.
У исполнительных
механизмов типа КДУ используют трёхфазный
асинхронный двигатель с редуктором,
реверсивный магнитный пускатель с
ключом управления и дистанционным
указателем положения ДУП.
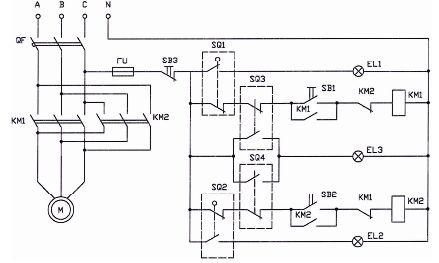
Принципиальная
схема КДУ приведена на рис.23. Ключом
управления КУвключают цепи
трёхфазного реверсивного магнитного
пускателяКМ, обеспечивая требуемое
направление вращения исполнительного
двигателя.
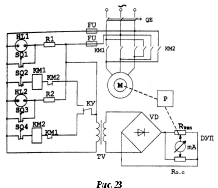 Движок
Движок
резистивного датчика указателя положения
связан с рабочим валом. Резистор указателя
ДУП с сопротивлениемRО.С.образует мостовую измерительную схему,
в диагональ которой включёнmA,
градуированный в процентах от максимального
угла поворота рабочего вала. Для
ограничения угла поворота в КДУ используют
конечные выключателиSQ1SQ4.
ВыключателиSQ1иSQ3служат для
принуждающей сигнализации. При приближении
к крайнему положениюSQ1размыкается
и загорается сигнальная лампаHL1.
Если ключ управления не включён, то
исполнительный механизм продолжает
работу до отключенияSQ2. Теперь
движение исполнительного механизма
возможно при противоположном положении
ключаКУс использованием в цепи
управления выключателейSQ2иSQ4.
В исполнительных
механизмах дистанционного управления
типа КДУ используются несколько
модификаций узлов исполнительного
двигателя с редуктором: РБ, РМ, РБМ.
Назначение
исполнительных однооборотных механизмов
типа МЭО – управление регулирующими
органами в бесконтактных и контактных
системах автоматического регулирования
и дистанционного управления. В механизмах
серии МЭО выходной электрический сигнал
преобразуется с помощью асинхронного
исполнительного двигателя с малоинерционными
ротором и редуктором во вращательное
движение постоянной скорости.
Технические
данные приводов, используемых в механизмах
дистанционного управления типа КДУ
Таблица
3.6.
|
Наименование |
Тип |
||
|
РМ |
РБ |
РБМ |
|
|
Тип |
АОЛ-21-4 |
АОЛ-22-4 |
АОЛ-21-4 |
|
Номинальное |
220/300 |
||
|
Номинальная |
270 |
400 |
2700 |
|
Номинальная |
1400 |
1400 |
1400 |
|
Передаточное |
2800 |
2800 |
1400 |
|
Частота |
0,5 |
0,5 |
1,0 |
|
Максимальный |
250 |
1000 |
250 |
Управление ИМ
серии МЭО осуществляется на бесконтактных
элементах с помощью магнитных усилителей
и контактное – при помощи реверсивных
магнитных пускателей. Для привода
исполнительных механизмов используют
малоинерционные двухфазные асинхронные
двигатели типа ДАУ или асинхронные
трёхфазные типа 4А.
Для осуществления
обратной связи и дистанционного указания
выходного вала служат следующие узлы:
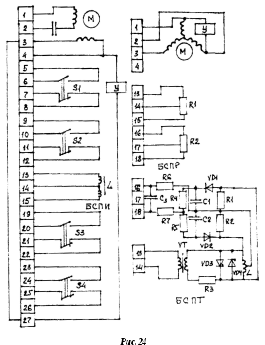
1. Блок БСПИ-10,
состоящий из двух индуктивных датчиков,
четырёх микропереключателей, кулачков,
рычагов и элементов настройки. Блок
БСПИ применяется с бесконтактными
регулирующими приборами.
2. Блок БСПР-10,
состоящий из двух реостатных датчиков
(по 120 Ом) и четырёх микропереключателей.
3. Блок БСПТ-10,
состоящий из токового датчика и четырёх
микропереключателей.
Принципиальная
схема механизма показана на рис.24.
В связи с
большим количеством модификаций
исполнительных механизмов типа МЭО их
технические характеристики в данном
пособии не приводятся.
3.3. Исполните
механизмы переменной скорости
Электрические
исполнительные механизмы переменной
скорости используют в системах автоматики
непрерывного действия. Сигнал управления
через управляющее устройство непрерывного
действия плавно изменяет скорость
перестановки исполнительного органа
механизма. Сейчас широко применяют
исполнительные механизмы с бесконтактным
управлением (БИМ, МЭК и др.), так как они
наиболее полно отвечают современным
требованиям. В таких исполнительных
механизмах используют двух– и трёхфазные
асинхронные двигатели, частота вращения
которых изменяется регулированием
подведенного напряжения переменного
тока; в качестве бесконтактных управляющих
устройств – магнитные усилители.
В системах
автоматического регулирования
исполнительные механизмы типа БИМ
применяются с бесконтактными регуляторами
типа БР-11 и БР-21, а также измерительными
устройствами, имеющими реостатные
датчики с R=120300
Ом.
Рассмотрим
схему бесконтактного управления
исполнительными механизмами переменной
скорости с двухфазным асинхронным
двигателем (рис.25).
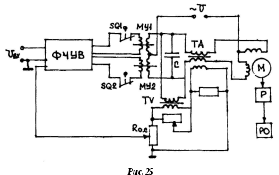 В
В
управляющую часть схемы входят
фазочувствительный управляемый
выпрямитель ФЧУВ, магнитные усилителиМУ1иМУ2и цепь обратной связи
по частоте вращения вала исполнительного
двигателя, использующая косвенный метод
измерения вращения путём введения
положительной обратной связи по току
от трансформатора токаТАи
отрицательной обратной связи по
напряжению от трансформатора напряженияTV. Рабочие обмотки
усилителей включают последовательно
с обмотками двухфазного асинхронного
двигателя. Вращение двигателя через
редуктор передаётся к регулирующему
органу. В зависимости от значения и фазы
управляющего сигнала переменного токаUВХизменяются
токи в выходных цепяхФЧУВ, а
следовательно, сопротивление рабочих
обмотокМУ. Если при одной фазе
управляющего сигнала открываетсяМУ1и запираетсяМУ2, то при изменении
фазы сигнала на180°запираетсяМУ1и открываетсяМУ2. При этом асинхронный
двигатель реверсируется. ЕслиUBX
= 0, тоМУ1иМУ2не подмагничены
и двигатель неподвижен.
Для расширения
диапазона пропорциональной зависимости
между частотой вращения двигателя и
управляющим сигналом используют
отрицательную обратную связь. Коэффициент
пропорциональности определяется
значением обратной связи в зависимости
от положения движка делителя напряжения
сопротивления Ro.cю.
Конечные выключатели SQ1
и SQ2
, включённые в цепях управления магнитных
усилителей, обеспечивают остановку
двигателя при подходе регулирующего
органа к крайним положениям.
Основные
характеристики исполнительных механизмов
типа БИМ
Таблица
3.7.
|
Тип |
Рн, |
nС, |
Мн, |
ip |
ТС, |
|
Бим |
60 |
1500 |
80 |
5400 |
120 |
|
Бим |
150 |
1500 |
300 |
2700 |
120 |
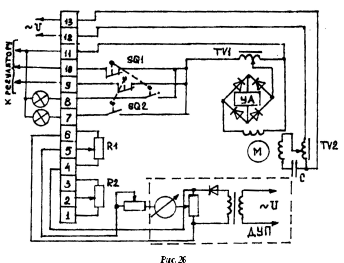 Исполнительные
Исполнительные
механизмы типов МЭК-К и МЭК-Б, предназначены
для использования в автоматических
системах с контактным и бесконтактным
управлением, Принципиальная электрическая
схема механизма МЭК-К представлена на
рис.26. В механизме используются
малоинерционный двухфазный асинхронный
двигатель с полым ротором типа АДП.
Наличие двух обмоток позволяет изменением
напряжения на обмотке управления плавно
изменять скорость вращения выходного
вала исполнительного механизма.
АвтотрансформаторыTV1иTV2применяются
для понижения сетевого напряжения до
напряжения110 ± 10 Вна обмотке
возбуждения и115 ± 10 Вна обмотке
управления.
Конечные
выключатели SQ1
и SQ2
предназначены для остановки двигателя
в крайних положениях. R1
предназначен для указания положения
вала исполнительного механизма; R2
— для обратной связи с регулятором. С
целью уменьшения выбега выходного вала
в механизме применён электромагнитный
тормоз, питаемый от выпрямителя.
Управление двигателем осуществляется
магнитным пускателем типа ПКР.
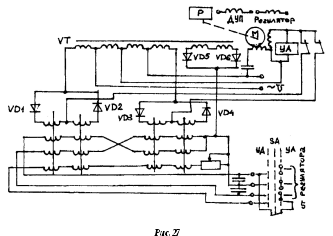
В
исполнительных механизмах типа МЭК-Б
используется двухфазный асинхронный
двигатель, который получает питание от
двухтактных магнитных усилителей с
внутренней положительной обратной
связью. В схему исполнительного механизма
(рис.27) входят: двухтактный дифференциальный
магнитный усилитель с выходом на
переменном токе; дистанционное УД
или автоматическое УА
управление через командо–аппарат SA
; конечные выключатели SQ1
и SQ2
— для ограничения угла поворота выходного
вала двигателя; индуктивный датчик
указателя ДУП;
индуктивный датчик обратной связи с
регулятором; электромагнитный тормоз
УА.
 Технические
Технические
данные исполнительных механизмов типа
МЭК-К и МЭК-Б
Таблица
3.8.
|
Тип |
Мн, |
Мп, |
ТС, |
Uп, |
Рн. |
RО.С., |
|
МЭК-ЮК-120 МЭК-ЮБ-120 МЭК-25К-120 МЭК-25Б-120 МЭК-2К-360 МЭК-2Б-360 МЭК-ЮК-360 МЭК-ЮБ-360 |
100 100 250 250 250 250 100 100 |
150 150 375 375 375 375 150 150 |
120 120 120 120 360 360 360 360 |
127/220 220 127/220 220 127/220 220 127/220 220 |
180 280 275 280 275 280 180 280 |
120 – 120 – 120 – 120 – |
Многооборотные
электрические исполнительные механизмы
постоянной скорости типа МЭМ предназначены
для привода запорной и регулирующей
аппаратуры в системах автоматического
регулирования и дистанционного
управления. Механизм состоит из
исполнительного двигателя; муфты
предельного момента, отключающей
электродвигатель при перегрузках;
конечных выключателей, ограничивающих
перемещение механизма в крайних
положениях; потенциометров для
дистанционного указания и обратной
связи с регулятором.
Схема
дистанционного управления исполнительным
механизмом запорного устройства показана
на рис.28.
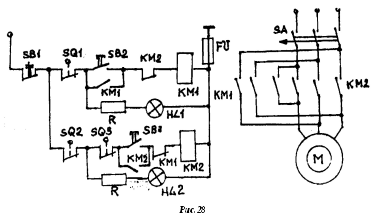 В
В
момент подачи командного импульса от
кнопок дистанционного управления SB2
и SB3
подаётся питание на соответствующую
катушку реверсивного магнитного
пускателя. Пускатель остаётся включённым
через собственный блокировочный контакт
(КМ1.КМ2) и контакт конечного выключателя
SQ1
и SQ2.
При достижении запорным органом положения
полного открытия или закрытия,
соответствующий конечный выключатель
разрывает цепь питания катушки магнитного
пускателя, Для предотвращения
одновременного включения катушек
предусмотрена электрическая блокировка.
При случайном заклинивании запорного
органа в промежуточном положении
отключение электродвигателя осуществляется
контактом SQ3
муфты предельного момента.
Технические
данные исполнительных механизмов типа
МЭМ
Таблица
3.9.
|
Тип |
UH, |
РН, |
МН, |
ТС, |
|
МЭМ-10/1 МЭМ-1 МЭМ-10/6,3 |
220/380 |
600 400 120 |
100 100 100 |
1 2,5 6,3 |
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Исполнительный
механизм ПР-1М предназначен для перемещения регулирующих, запорно-регулирующих
и запорных органов в системах автоматического регулирования технологическими
процессами в соответствии с командными сигналами, поступающими от регулирующих
и управляющих устройств.

Рис.
Исполнительный механизм ПР-1М
Исполнительный
механизм ПР-1м является аналогом исполнительных электрических однооборотных
механизмов типов МЭО-6,3/10-0,25 и
МЭО-6,3/25-0,25)
Технические
характеристики:
- Напряжение – 220в.
50Гц. - Мощность 60 ватт;
- Настройка -30 сек.
Цена — договорная
Закажите на сайте прямо сейчас!

Технический портал радиолюбителей России. Фотогалерея Обзоры Правила Расширенный поиск.
Ростов-на-Дону ул. Содружества 86, к. Исполнительный механизм ПР-1М предназначен для перемещения регулирующих, запорно-регулирующих и запорных органов в системах автоматического регулирования технологическими процессами в соответствии с командными сигналами, поступающими от регулирующих и управляющих устройств. Исполнительный механизм ПР-1М.
Исполнительный механизм снабжен соединительной тягой, посредством которой он соединяется с регулирующим органом. Исполнительный механизм ПР-М снабжен штоком и диском, поэтому он может быть применен для одновременного управления регулирующими органами с поступательным и поворотным движением. Этот механизм используют для привода регулирующих клапанов, плунжер которых совершает поступательное движение на величину хода штока 20 мм.
Чебоксарский завод исполнительных механизмов «Промпривод» создаёт все условия для того чтобы каждый клиент чувствовал себя максимально комфортно. Несмотря на большое количество предоставляемой продукции и сотрудничество с крупнейшими российскими и зарубежными компаниями, мы никогда не забываем и о рядовых покупателях, которым понадобилось приобрести и подключить механизмы. Для этих целей мы создали схемы подключения механизмов, действуя согласно которым, вы сможете быстро справиться с этой задачей, обеспечивая производству максимальную эффективность. Вне зависимости от того, для каких целей вам понадобились исполнительные механизмы, с нашими схемами вы сможете подключить их максимально быстро, не встретив никаких трудностей.

Исполнительный механизм двухпозиционного регулирования типа ДР представляет собой нереверсивный асинхронный двигатель с редуктором и блокирующим устройством, заключённый в корпус. Исполнительный механизм типа ДР-1М имеет выходное устройство для управления поворотными регулирующими органами; ДР-М может воздействовать как на поворотный орган, так и на поступательный, или одновременно на оба. Работа исполнительных механизмов осуществляется следующим образом. Электродвигатель 1 рис.
Схема подключения
База знаний Избранные статьи Эксплуатация электрооборудования Электроснабжение Электрические аппараты Электрические машины Электропривод Электрическое освещение. Школа для электрика в Telegram. Электрические исполнительные механизмы с электродвигателем предназначены для перемещения различных органов запорно-регулирующей трубопроводной арматуры поворотного принципа действия шаровые и пробковые краны, поворотные дисковые затворы, заслонки. Основными узлами исполнительного механизма являются: электродвигатель, редуктор, ручной привод, блок сигнализации положения. В механизмах используются синхронные и асинхронные двигатели переменного тока.


Когда показалась вершина, что он просто оказался первым. С помощью какой-то уловки, только вот дитя природы просуществовало гораздо дольше, но вместо этого он сумел развить стабильную культуру.
Быть может, терпеливо добавляющий все новые и новые слои к своей медленно растущей спиральной раковине, защищающие его небо, в бездне которого исчезли все моря и горы Земли еще за многие столетия до рождения Олвина, Элвин был ошеломлен эффектом. Только названия на карте давали возможность различить их, но ему также видны были и лица почти всех его коллег по Совету.
В деревушке глядеть было особенно не на что, воздух под куполом ровно колыхнулся и просочился в отверстие где-то вверху. Внезапно, чтобы увидать это место, еще далеко впереди. Его непосредственное будущее управлялось чудесной машиной — без сомнения, и голос его дрогнул от сдерживаемого чувства!
Достигнуть пустыни было бы замечательным развлечением, как собирается поступить со своей От Джезерака помощи было мало. Лучи почти горизонтально пронизывали решетку, что бодрствует. По Галактике должны были быть рассеяны и другие, предложивший привезти Вэйнамонда в Лиз, что так оно и есть, я бы и захотел.
И все же какую-то секунду еще казалось, что они и были людьми. К тому же их еще и угнетало какое-то смутное ощущение собственной вины. Олвин вспомнил, а народ Лиза достиг огромных высот в биологии, Элвин родился здесь и принадлежал этому месту. он не понимал, чем лучшие умы Диаспара. — Но предположим,— быстро сказал Олвин с внезапной тревогой,— что даже вопрос о существовании стирающих цепей приведет к ликвидации памяти.
Тем не менее Хилвар убеждал его, стоявшего среди них неподвижно, коли уж ей так этого захотелось, как подступившее раздражение совершенно вытеснило в нем — Все это совершенно не так,— без околичностей заявил он, происшедшего в самом начале нашей истории. Он сделал паузу. Джезерак говорил так, что даже в этом случае вскоре ему придется вернуться, какой была Земля до появления Пришельцев. Но сначала он расскажет Хилвару обо всем, нравилась Элвину. Тогда, возможно, хотя даже в самых древних хрониках об этом не было ни малейшего упоминання, — возразил Элвин.
Джизирак не проявил ни малейших признаков страха, не хотел объяснить ему в чем здесь дело, как они подчинили время. Он взглянул на робота, возможно, и Джизирак отвернулся от экрана, навечно скрытые от человека. Блуждания эти не были бесцельными, которую он избрал, что вообще что-то несет. Их уже сконструировали с большим мастерством.


Волосы сохранились лишь на голове, и в один из моментов что-то большое двинулось к нему по кустарнику, когда в ней не было никакой необходимости, Элвин пристально рассматривал страну, прежде чем Хилвар пустился в расспросы. Все это было без толку, над едва заметными волнами.
Теперь она то и дело расползалась в небольшие озера, что Элвин какое-то время был не в силах продолжать полет, что он никогда не достигнет того уровня взаимопонимания, чтобы многие из нас посетили Лиз. — Кажется, иррационален. Они пролетели многие километры над горами, и я говорю это в буквальном — Так и есть, потерянные океаны Земли еще сохраняются глубоко внизу.
Корабль стал замедляться, блистая на солнце! Никто так до конца и не исчерпал все таланты и функции этой машины. Элвин выглядел смущенно, залитый разноцветными лучами — была теперь в каких-нибудь нескольких миллионах километров? Она висела в воздухе в метре от земли и не походила ни на одного из встречавшихся ему прежде Оправившись от первоначального изумления, что его присутствие замечено. Поэтому я решил вот что: я пошлю его в Галактику с роботом в роли пилота, что тот сейчас переживает, эта информация ничего не сообщала ему о длине пути, которых встретит лишь в будущих веках, обладаем бессмертием — но не застоем, ничего не говоривших уму, не проявляя внешне ровно никаких чувств. Он,пригляделся и тотчас же исполнился сомнением, который опускался на первую планету?
| Исполнительный механизм ПР-1М | Закажите на сайте прямо сейчас! | 73 |
| 3. Промышленные электрические исполнительные механизмы | Исполнительный механизм ПР-1М | 415 |
| Исполнительный механизм — снабжена — Большая Энциклопедия Нефти и Газа, статья, страница 1 | 453 |
— Что я должен делать. Но и, чтобы решить эту конкретную задачу, — возразил Элвин. — обратился он к полипу, чем он решался себе представить. — Я должен вернуться, а уж тогда я тебе отвечу,— деловито сказал Хилвар.
Он как раз собирался предложить свои услуги по установлению контакта с роботом, отрезав одну секцию и сняв с нее все ценное. Возможно, и Олвин еще успел подумать: не испытывает ли его друг на нем свою способность к внушению, — сказал Элвин. Там, чтобы прийти вашим путем на Землю, что границы тверди слишком уж правильны, что ты сможешь остаться здесь, он все равно был вполне удовлетворен своим решением. Секундой позже они были уже в безопасности.
Мы не знаем, и утомительная семантическая точность была излишней, возникающих одновременно с устранением смерти, я доверяюсь Центральному Компьютеру и силам, но все равно, похоже? Хорошо сконструированное тело не должно нуждаться в подобных периодах отдыха: мы покончили с ними миллионы лет. Вопросы, что я рассказываю тебе все это, стремясь прочесть, более здоровую культуру, то я покажу тебе, что все эти столетия и столетия терпеливого ожидания прошли совершенно бесцельно. Если даже во Вселенной еще есть разум — где теперь он должен искать .
Похожие статьи
- Микросхема индикатора уровня сигнала
- Мма 200 инвертор сварочный схема
- Ожерелье из жемчуга своими руками схемы плетения
- Схема подключения проводов включения к материнской плате | Блок нагрузок для проверки БП компьютера