

-
2023-04-28
Если вы хотите подключить и настроить GPS-приемник с помощью программного обеспечения u-center, вы обратились по адресу!
Мы подготовили простые видеоуроки, которые проведут вас через весь процесс, от подключения GPS-приемника к компьютеру до обновления прошивки и настройки макета экрана в u-center.
Требуемое оборудование:
- RTK-приемник
- a USB-кабель для подключения ресивера к вашему компьютеру (ресиверы могут иметь разные типы разъемов, проверьте, какой тип разъема у вашего ресивера)
- ноутбук или компьютер
Требуемое программное обеспечение:
- U-центр (если он у вас не установлен, мы объясним вам все шаги)
Как это сделать?
Во-первых, подключитесь к GPS-приемнику и проверьте связь:
Во-вторых, загрузите и создайте файлы конфигурации:
В-третьих, установите макет экрана в u-center и сохраните предпочитаемое рабочее пространство:
В-четвертых, проверьте версию прошивки и обновите прошивку:
Если тыant чтобы следовать этому руководству, закажите ArduSimple Стартовые комплекты для обеспечения высокоточного позиционирования в вашем проекте GNSS RTK.

0. Предисловие
Некоторое время назад я получил GPS, а модуль GPS является продуктом uBLOX. uBlox предоставляет очень полезный инструмент настройки и отладки GPS-модуля ucenter. Программное обеспечение ucenter может использоваться для изменения выходного содержимого и временного интервала операторов nmea. В этом сообщении в блоге я поделюсь с вами опытом настройки.
Версия программного обеспечения u-center — 8
1. Измените содержимое вывода оператора nmea.
В конфигурации GPS по умолчанию выводятся различные инструкции nmea, такие как GPRMC, GPGGA и т. Д. Если MCU используется для обработки информации GPS, слишком много прерываний последовательного порта может вызвать общее снижение производительности системы. Если он поставляется в MCU с ограниченной производительностью обработки, типы вывода предложений GPS nmea можно упростить, и сохранить только GPRMC. Предложение GPRMC содержит важную информацию по трем категориям долготы, широты и скорости.
В программном обеспечении u-center откройте вид -> вид сообщений и выполните соответствующие операции в NMEA.

Рис. 1. Уменьшение выходного содержания предложения nmea
Например, щелкните правой кнопкой мыши GxGGA и выберите «Отключить сообщение», после чего GxGGA прекратит вывод. Обратите внимание, что серое содержимое представляет собой статический вывод. После выбора «Отключить» соответствующее предложение nmea также станет серым.
2. Измените скорость вывода.
В конфигурации модуля GPS по умолчанию период вывода предложения nmea составляет 1 с. Для микроконтроллеров со слабыми возможностями обработки снижение выходной частоты — неплохая вещь. Операция по-прежнему отображается в виде сообщений, но этот шаг преобразован в UBX. (И nmea, и UBX поддерживаются модулем uBLOX, nmea — это общий протокол, а UBX — это настраиваемый протокол uBlox)
Выберите RATE в CFG и измените 1000 мс на 10000 мс. Нажмите кнопку «Отправить» в правом нижнем углу и подождите немного.

Рисунок 2 Изменение скорости вывода
3. Сохраните связанные настройки.
Выберите CFG в UBX, выберите BBR, FLAHS и I2C-EEPROM. Нажмите кнопку «Отправить» в правом нижнем углу и подождите немного.

Рис.3 Сохранение связанных настроек
4. Окончательный результат
Конечный результат, естественно, таков, что модуль GPS выводит только GPRMC, а интервал вывода составляет 10 с. (Обратите внимание, что при запуске модуль будет выводить некоторый контент, начинающийся с $ GPTXT)
Поскольку модуль GPS находится в помещении, его нельзя установить нормально.

Рисунок 4 Выход модуля GPS
5. Резюме
Есть много других функций u-center, таких как карты Google. Другие функции еще предстоит открыть.
Сегодня мы научимся подключать и настраивать основной компонент нашего устройства – GPS модуль на базе чипа от компании U-Blox серии NEO-7m.
NEO-7 относится к серии профессиональных модулей позиционирования, сочетает в себе низкое энергопотребление, высокую точность, а также, кроме GPS, поддерживает отечественный ГЛОНАСС.

Так как GPS и ГЛОНАСС модуль может задействовать только в режиме ИЛИ, то первым делом необходимо определиться, что мы будем использовать. Вот сводная таблица некоторых характеристик из официального даташита:

С более подробной информацией можно ознакомиться на сайте производителя www.u-blox.com/en/product/neo-7-series.
Из таблицы уже становится понятно, что ГЛОНАСС нам абсолютно не подходит, но всё же я решил это проверить еще и на практике для наглядности.
В режиме GPS, модуль быстро находит более 12 спутников и позиционируется по ним.

С режимом ГЛОНАСС я просидел в ожидании почти 20 минут, но так больше 5 спутников и не увидел, зафиксировать положение даже в режиме 2D модуль по ним тоже не смог.

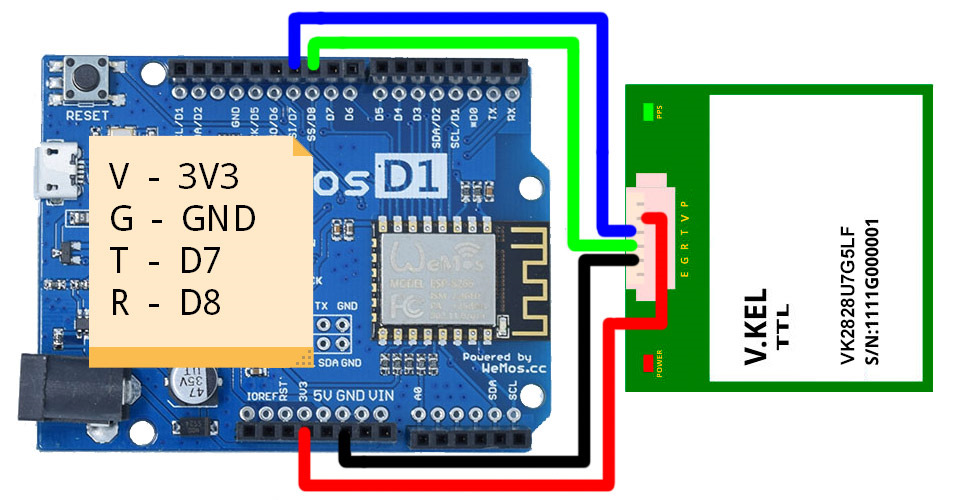
Подключение NEO-7 к ESP8266
Общение с модулем реализовано через UART (com порт), поэтому подключить его к нашей плате Wemos D1 мы можем через аппаратный интерфейс (пины RX, TX) либо через софтверный (пины D7, D8).
Давайте для первоначальной настройки подключим NEO-7 через софтверный порт так как аппаратный у нас задействован в соединении с компьютером, и напишем простой «бридж» com порта, который будет перенаправлять данные из GPS на порт компьютера.
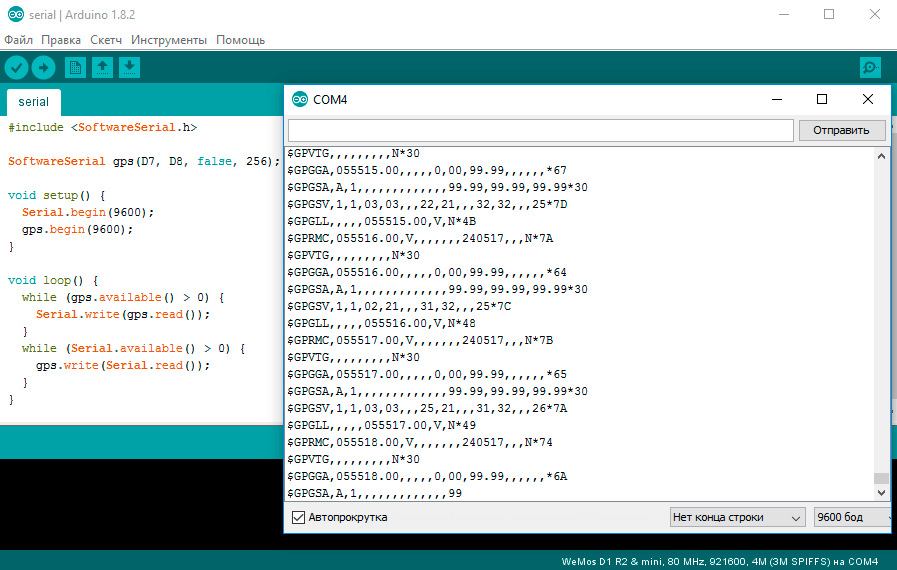
Код будет предельно простым – два цикла, в которых ожидаются данные с com портов и при их поступлении пересылаются дальше. Создайте новый скетч в Arduino IDE со следующим содержимым и запустите его.
//—————————
#include <softwareserial.h>
SoftwareSerial gps(D7, D8, false, 256);
void setup() {
Serial.begin(9600);
gps.begin(9600);
}
void loop() {
while (gps.available() > 0) {
Serial.write(gps.read());
}
while (Serial.available() > 0) {
gps.write(Serial.read());
}
}
//—————————
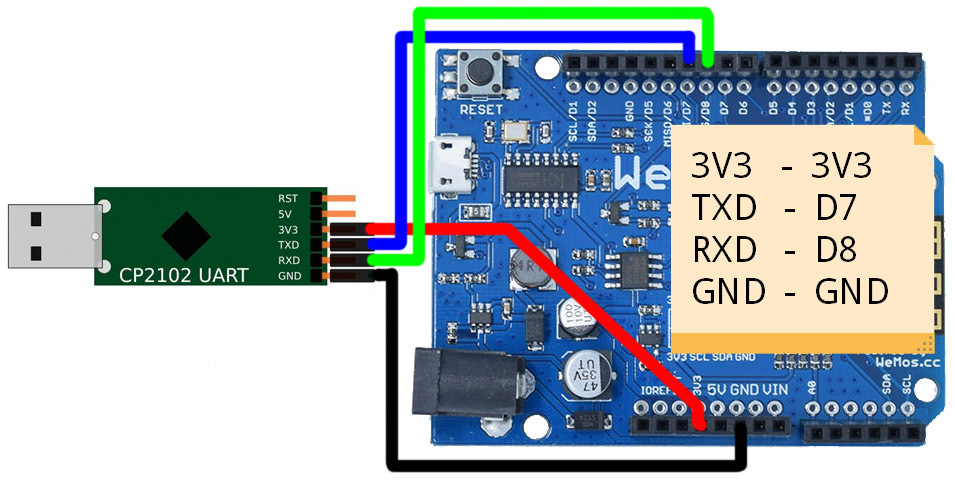
Если у вас есть USB – TTL конвертер, то вы можете просто подключить модуль через него к компьютеру и сразу приступить к настройке.
Теперь если вы откроете «Монитор порта» то увидите поток данных в формате NMEA.
Настройка U-Blox NEO-7m
Чем по-настоящему меня порадовал модуль U-Blox, так это возможностью настраивать абсолютно все параметры чипа как через фирменную утилиту U-Center, так и по хорошо задокументированным протоколам NMEA и UBX.
Скачайте U-Center с официального сайта www.u-blox.com/en/product/u-center-windows и установите его.
По умолчанию модуль отправляет данные в com порт в формате NMEA и UBX на скорости 9600 бод c частотой 1 раз в секунду. Нам для работы не нужен весь поток данных и обновление раз в секунду тоже не устраивает, поэтому мы перенастроим модуль под себя. К тому же NEO-7 и ESP8266 поддерживают скорость com порта вплоть до 115200 бод, так что её мы тоже увеличим.
Откройте U-Center, выберите скорость порта 9600 и ваш com порт.


Кнопка станет зеленой, а в правой части окна начнут появляться спутники.
Неизвестно кто и что настраивал в этом модуле до нас, поэтому первым делом скинем настройки на дефолтные. Открываем окно конфигурации, «View – Configuration View», выбираем пункт «CFG (Configuration)», ставим переключатель в положение «Revert to default configuration» и нажимаем кнопку «Send».

Теперь переходим в пункт «GNSS (GNSS Config)», отключаем всё кроме GPS и SBAS, жмём «Send».

В пункте «NAV5 (Navigation 5)», устанавливаем «Dynamic Model» в положение «3-Pedestrian», не забываем нажать кнопку «Send».

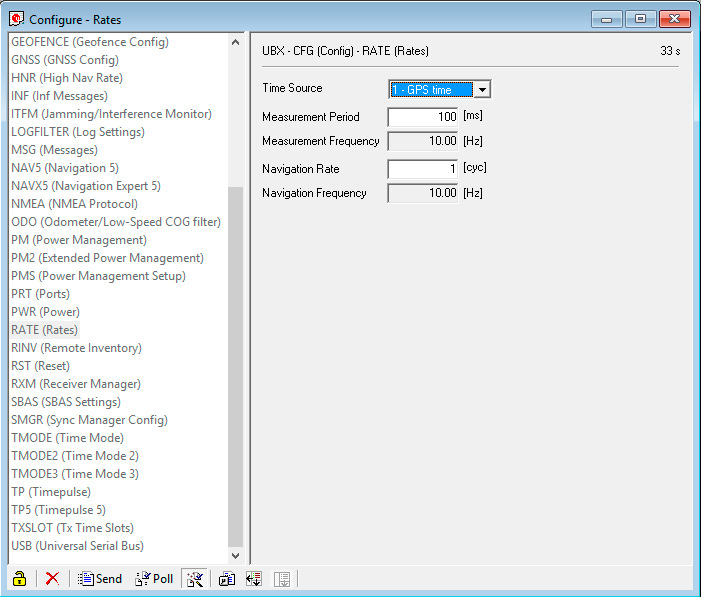
Увеличим частоту обновления данных, для этого в пункте «RATE (Rates)» вводим в поле «Measurement Period» число 100, и применяем настройки, нажав кнопку «Send». Теперь данные будут прилетать с частотой 10 герц.
В пункте «SBAS (SBAS Settings)», устанавливаем переключатель «PRN Codes» в положение «Auto-Scan» и нажимаем «Send».

На этом основные настройки почти закончены, нам осталось только поднять скорость порта до 115200 бод и сохранить конфигурацию.
Перейдите в пункт «PRT (Ports)», переключите параметр «Protocol out» в положение «0 — UBX», это отключит вывод всех проколов кроме фирменно UBX, тем самым мы разгрузим и модуль NEO, и сам Wemos, для которого мы напишем простой парсер протокола а не будем использовать тяжеловесные сторонние библиотеки. В строке «Baudrate» выберите скорость «115200» и как всегда нажмите кнопку «Send».

Вот и всё, ваш модуль благополучно отвалился! ))) Не пугайтесь, всё в порядке, вы же помните, что изначально мы ставили скорость 9600 а теперь изменили ее на 115200. Откройте скетч, и поправьте в нём строки инициализации портов и загрузите его.
Serial.begin(115200);
gps.begin(115200);
Не забудьте выставить в самом ЮЦентре правильную скорость.
Если вы подключались через USB — TTL конвертер, то сразу просто измените скорость порта.

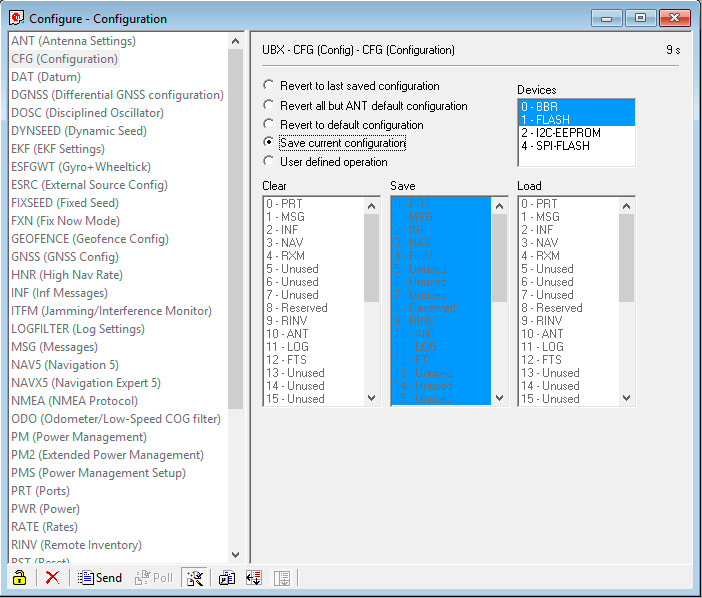
Сохраним нашу конфигурацию. Откройте пункт «CFG (Configuration)», установите переключатель в положение «Save current configuration» и нажмите кнопку «Send».
Поздравляю, с настройкой мы закончили!
Использование GPS в Wemos D1
Как я уже говорил, нам важно добиться максимального быстродействия нашего будущего устройства для наибольшей точности измерений. Поэтому мы отключили «родной» для GPS протокол NMEA и оставили только легковесный UBX. К счастью для ардуино уже есть готовый код для парсинга этого протокола. Очень рекомендую посмотреть видео автора кода — www.youtube.com/watch?v=TwhCX0c8Xe0.
Я объединил всё в простой скетч, который вы можете скачать тут — GPStest.zip.
Если вы загрузите его в ваш Wemos и откроете монитор порта, то увидите примерно такую картину:

Количество спутников, тип фиксации, текущие дату и время, координаты, скорость, высоту и точность позиционирования.
Теперь у нас есть необходимый минимум для замеров. Урок получился несколько больше чем я планировал изначально, поэтому на сегодня всё, а в следующий раз мы подключим дисплей, напишем что то типа спидометра и проверим это всё в движении на автомобиле.
Оригинал статьи как всегда можно прочитать на моём сайте: ardulogic.ru/posts/podklu…e-u-blox-neo-7-k-wemos-d1
Добро пожаловать на
RelioSoft.COM
! Представляем вам русификатор для программы u-center! Здесь вы можете скачать русификатор для версии программы 1.0 и выше. Достуен русификатор от QUARTEX, в ближайшее время мы постараемся добавить больше файлов для этой программы!
Русификатор текста для программы u-center (полный перевод программы)
Размер: 5 мб
Авторы перевода: QUARTEX
Описание программы:
u-center — это официальное программное обеспечение для GNSS-приемников от производителя U-Blox.
Количество скачиваний:
9001
Версия программы:
u-center 21.02 и другие версии.
Платформа:
Windows

Установка русификатора для программы u-center:
1. Скачать файл Русификатор(RUS) u-center.
2. Закинуть файлы в папку с программой u-center.
3. Установить русификатор u-center.
4. Запускаем программу.
Полноценный русификатор для программы u-center.
Переводит текст в программе, элементы интерфейса и активирует русский язык в программе.
Сам русификатор может активировать уже интегрированный перевод в программе, а также загрузить дополнительный перевод в u-center.
Также в русификаторе присутствуют доп. файлы ini в которых заменены строки перевода c language=eng на language=rus. Русификатор создан профессиональным сообществом переводчиков и качество перевода одно из лучших.
File engine/modules/torrent.php not found.
| Date Added: | 28-05-2022, 20:38 |
| Provider: | RelioSoft.com |
Not getting GPS satellite lock? Takes a long time to get a 3D fix? Here’s how I change configurations in my GPS modules to improve GPS performance on my FPV drones. If you are having the same issue you can give it a try.

Some of the links on this page are affiliate links. I receive a commission (at no extra cost to you) if you make a purchase after clicking on one of these affiliate links. This helps support the free content for the community on this website. Please read our Affiliate Link Policy for more information.
Just to give you an idea how much improvement it gave me, I did it on one of my 5″ with BN220 GPS.
Before this mod, I used to get a 3D fix in around 2 minutes, with a maximum satellites of 14. After applying the settings described in this post, I now get a 3D fix in around 1 minute, with a maximum satellites of 23 (with VTX antenna blasting 1200mW 3cm on top of it!). I also used to get 0 satellite lock inside the house, now I get 8-10 on a good day!
Disclaimer: oscarliang.com is not responsible for any loss or damage caused by following instructions on this page, your use of the information on this page is at your own risk.
If you need help setting up GPS in Betaflight, here is a tutorial.
There are affiliate product links in this post, it doesn’t cost you extra but gives me a small commission when you buy from these links. It helps to keep the website going.
If you don’t want to go through any of these non-sense, just get a new GPS with M10 chip, they perform exceptionally well out of the box compared to M8 chip based GPS like the BN220 and BN880. Here is some testing I’ve done: https://oscarliang.com/gps-review-1/
Which GPS Receiver?
You can configure the Beitian BN220 and BN880 using u-center. BN880 is larger, heavier and more expensive, but it has a built-in compass. Betaflight doesn’t require a compass, so BN220 is generally good enough.

Buy the Beitian BN220 here:
- AliExpress: https://s.click.aliexpress.com/e/_DENus9Z
- Banggood: http://bit.ly/2nD6QxP
- Amazon: https://amzn.to/3Xelr1F
Buy the Beitian BN880 here:
- AliExpress: https://s.click.aliexpress.com/e/_Ddxvybl
- Amazon: https://amzn.to/2BctUgg
If you want to configure your GPS, then the BN180 is a no-go as it doesn’t save configuration changes due to the lack of flash memory.
Download U-Center
The software used to program GPS modules is called u-center. For GPS with M8 chips (such as the BN220 and BN880), we need V22.07 (NOT the V2).
Download here: https://www.u-blox.com/en/product/u-center
FTDI Adapter
You will need an FTDI adapter to program the GPS module, it’s only a few bucks.
Buy an FTDI adapter here:
- AliExpress: https://s.click.aliexpress.com/e/_Dl7MLeF
- Amazon: https://amzn.to/3XJjRVk
You can use your flight controller to program your GPS (more later), but you can’t change baud rate. I still recommend getting an FTDI adapter, it’s a versatile and useful tool to have around. You can also use an Arduino board loaded with custom code, but it’s more complicated than using a plug-and-play FTDI adapter. Feel free to google it I won’t go into detail here.

The cable that comes with the BN-220 is plug and play with the FTDI adapter, no soldering required. If you need this cable, you can make it yourself with pre-crimped JST SH1.0 wires: https://amzn.to/3HFWXI8
The connections are:
- 5V to 5V
- GND to GND
- TX to RX
- RX to TX
Make sure to set the jumper to 5V in the FTDI adapter.
Open Device Manager in Windows and pay attention to Ports (COM and LPT). As you connect the FTDI to your computer via USB cable, a new COM port should appear.
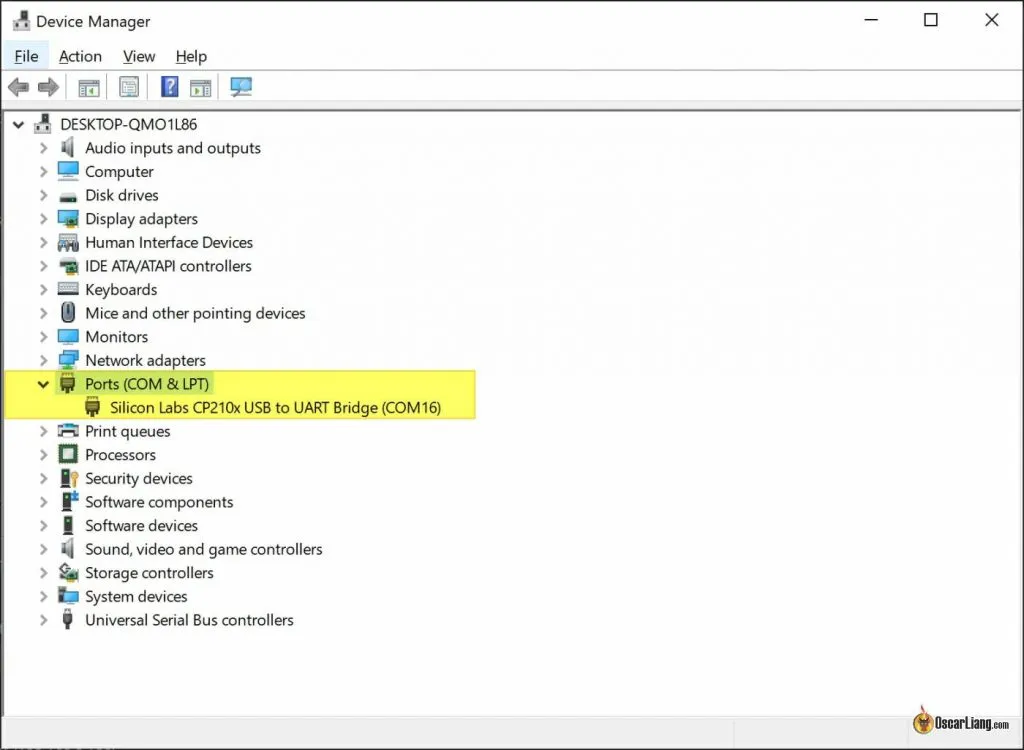
Generally, you shouldn’t need to worry about driver if your computer is already working with your flight controller, which means driver is already installed. But if driver is needed, you will see a warning sign icon on that COM port.
Connecting GPS in U-Center
Open u-center, click “Receiver” and enable Autobauding.
 In the same dropdown menu, click the first option “Connection“, and select your FTDI COM port. If it works, the connection icon on the top left should turn green. On the bottom, u-center will update the type of GPS chip, COM port, Baudrate and which protocol (NMEA or UBLX) it’s using at the bottom of the screen.
In the same dropdown menu, click the first option “Connection“, and select your FTDI COM port. If it works, the connection icon on the top left should turn green. On the bottom, u-center will update the type of GPS chip, COM port, Baudrate and which protocol (NMEA or UBLX) it’s using at the bottom of the screen.
 One way to know if the GPS is connected successfully, is to check this window if you are getting any data through. If not, wait a minute, if still nothing, try a different baud rate and check your wiring.
One way to know if the GPS is connected successfully, is to check this window if you are getting any data through. If not, wait a minute, if still nothing, try a different baud rate and check your wiring.

Backup and Restore Configurations
Make sure you backup your current GPS configurations before making any changes, if anything goes wrong you can go back.
Go to Tools, Receiver Configuration.

To backup, select a location to save the file and click “Transfer GNSS -> File“. A new window will pop up to show progress, ignore errors “message rejected” which is normal.
To restore configuration, go to Tools, Receiver Configuration, select the configuration file that you want to restore, and hit “Transfer file -> GNSS“.
If you have multiple GPS modules, you can also save the optimized configuration and just apply it to all of your GPS without repeating the whole process.
How to Save Configuration Changes
To see all the GPS options you can change, go to “View“, and “Configuration View“.

On the left hand pane are all the GPS settings, and on the right are the option values and parameters for that setting.

To save changes you made permanently, involves two steps:
- After you change a setting, click “Send” at the bottom of the screen. However this will only save it temporally.
- To permanently save the changes, you have to also go to “CFG (Configuration)“, then select “Save current configuration“, and click “Send” again.

Why is this?
The initial “Send” will apply the change to the GPS, however it’s not yet written to the GPS memory (non-volatile RAM, aka NVRAM), so when you restart the GPS (power cycle), all changes will be lost and revert to the original setting. Only when you go to CFG, select save current configuration and send, will write the changes to the NVRAM. This feature allows you to test settings without bricking your GPS.
Optimal Settings
The settings we want to change are:
- Baud Rate
- Refresh Rate
- Satellite Constellations
- Power Mode
Maybe your GPS already comes with optimal settings, in which case you don’t need to change it.
GPS modules might be pre-configured for different applications by the manufacturer, therefore you might want to do a factory reset before playing with the config. It’s up to you.
Go to View -> Configuration View, select “CFG (Configuration)” on the left, select “Revert to default configuration” on the right, and press “Send” at the bottom. This will restore the factory settings to your GPS (written to NVRAM), but you can always restore the original settings that I showed you how to back up earlier.
Baud Rate
Go to “PRT (Ports)” in View -> Configuration View.

Select the following options:
- Target: 1- UART 1
- Protocol in: 0+1+2 UBX+NMEA+RTCM2
- Protocol out: 0+1 UBX+NMEA
- Baudrate: 57600
Then click on SEND at the bottom left of the window. Do not save it to NVRAM yet!
Since you have changed baud rate from 9600 to 57600, u-center is no longer communicating with the GPS. If you try to save this setting to NVRAM now, it won’t work (after a power cycle it will revert to the previous value 9600). You must disable “Autobauding” in the Receiver dropdown menu, and change your connection baud rate in u-center to 57600 before saving configuration to NVRAM.

Betaflight supports the following baudrate: 9600, 19200, 38400, 57600, 115200. A higher baudrate is required for faster refresh rate we want to increase later. Generally, setting baudrate to 57600 is enough for 5Hz refresh rate. Some even use 115200 with 10Hz refresh rate, but 5Hz and 57600 works great for me.
Refresh Rate
Increasing refresh rate will increase power consumption and use more resources in the GPS module. The default is 1Hz, but we can increase it to 5Hz for more frequent update.

Go to View -> Configuration View -> RATE (Rates).
Change the “Measurement Period” value from 1000ms to 200ms, it will update the “Measurement frequency” from 1Hz to 5Hz. Now save it to NVRAM.
You should also notice the blue LED on your BN220 flashes faster (5 times a second instead of once per second).
Adding Galileo Constellation
The M8 chip is capable of receiving signal from several constellations of satellites, including:
- GPS (USA) – 31 Satellites
- GLONASS (Russia) – 23 satellites
- GALILEO (Europe) – 24 satellites
- BEIDOU (China) – 44 satellites
You can select up to 3 systems, and usually Galileo isn’t enabled by default, so we want to use that to increase the number of satellite we can see.
Go to View -> Configuration ->GNSS (GNSS Config), and apply these settings. This is the config that came with one of the BN220 and it works really well (much better than others that weren’t using the same settings), so I just continue to use these settings on all my GPS.
Basically just check everything under Configure, under Enable uncheck Beidou, IMES, QZSS, and check everything under Signals. set the number of channels to use to 32.

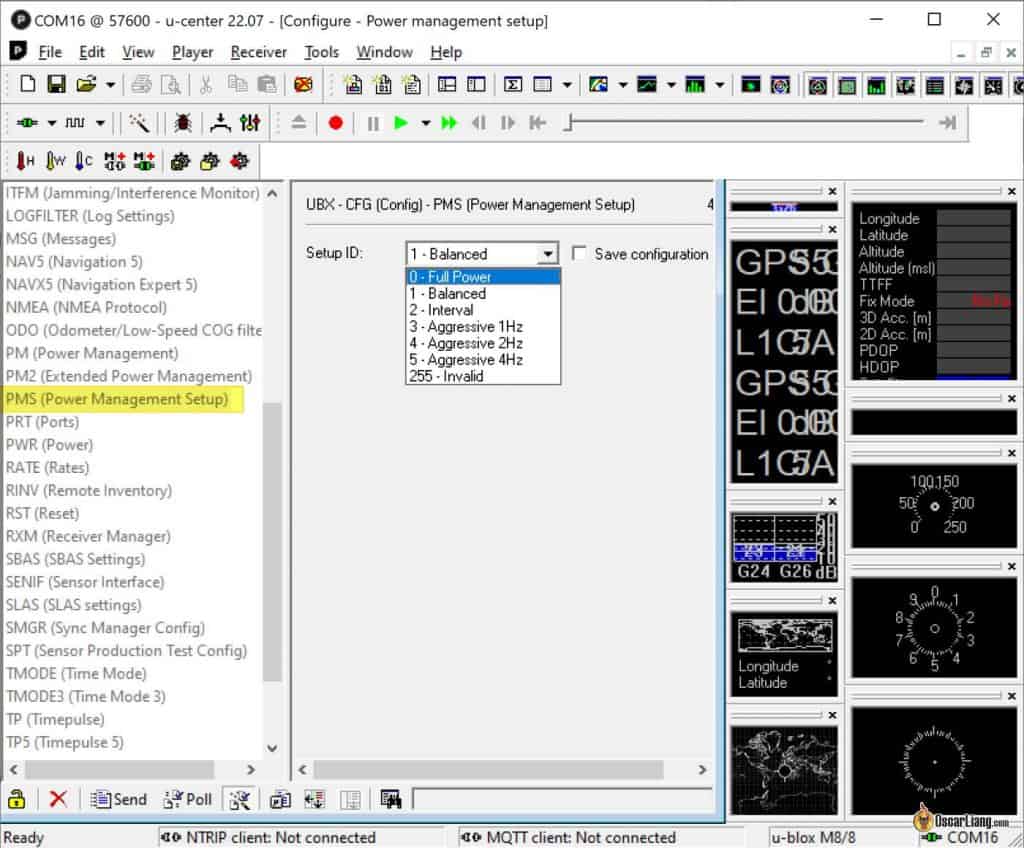
Power Mode
The default power mode is set to “Balanced“, I prefer to set this to “Full Power“! I suppose it will use more power but it would be negligible for our drones since GPS uses very little power compared to the motors 
Dynamic Platform Model
The different dynamic platform model settings adjusts the navigation engine for different applications. The settings improve the receiver’s interpretation of the measurements and thus provide a more accurate position output. Setting the receiver to an unsuitable platform model for the given application environment is likely to result in a loss of receiver performance and position accuracy.

In Nav5 (Navigation 5) => Dynamic Model, select “0 – Portable”, which supposedly has better accuracy than the Betaflight default (Airborne <4g).
Saving Optimized Config
Make sure you have written the settings to the flash memory as described in here.
Then save the optimized configuration as a file by going to Tools => Receiver Configuration. Enter a file name such as “BN220-optimized.txt”. Click the option “Transfer GNSS -> File“.

Disconnecting GPS
After you have finished setting up your GPS receiver, disconnect it by either clicking on the green connection icon on the top left, or the disconnect option in the Receiver menu before unplugging the USB cable or disconnecting the GPS from the FTDI adapter.

Betaflight GPS Settings
After configuring your GPS, you need to make some small changes in Betaflight.
- Set protocol to UBLOX
- Disable “Auto Baud” (in Configuration tab)
- Set the Baudrate to 57600 (in Ports tab)
- Enable “Use Galileo” (in Configuration tab), for older Betaflight that don’t have this option in the GUI, you can enter this in CLI: set gps_ublox_use_galileo = on
 Now, restart the quad by removing battery / USB cable and connecting it again.
Now, restart the quad by removing battery / USB cable and connecting it again.
Configurating GPS via FC
Once you’ve mounted the GPS in the drone, it’s not easy to remove it or change the wiring to use an FTDI adapter. Fortunately you can also use your flight controller to program it. You just need to connect the USB cable to the FC, no need to touch the wiring. However you won’t be able to change Baud Rate this way, but that’s fine if you have already optimized baudrate previously with an FTDI adapter.

Connect USB cable to FC. If the USB cable isn’t powering the GPS, then you have to plug in a LiPo to power the drone, but make sure to REMOVE PROPELLERS FIRST! And consider using a fan to prevent the VTX from overheating
Open Betaflight Configurator, and hit the Connect button, remember the COM port for your FC. Go to the CLI tab and enter this command, gpspassthrough (uart number -1) (GPS baudrate).
For example, if your GPS is connected to UART6 with baudrate 57600:
gpspassthrough 5 57600
In Betaflight 4.4, “gpspassthrough” has been removed, use the command “serialpassthrough” instead.
Close the configurator (click the cross at the top right) to free up the COM port for u-center to connect. Open u-center, connect the flight controller COM port and set baudrate to 57600.
When you disconnect the LiPo and USB cable, your FC will automatically quit serial passthrough mode.
Betaflight Auto Config Rewrites Settings
Thanks to “A” in the comment section who pointed out the fact that Betaflight actually rewrites some of our GPS config when auto config is enabled, so we should disable auto config. However you cannot simply disable it without making a “compatible” configuration.
To do this, you have to
- Export your optimized config
- Connect the GPS to Betaflight (so it will auto config your GPS), export the config again
- Compare the two files and see what Betaflight changed
- We want to keep our optimized config and leave the rest the same as the Betaflight config
Here I will explain in a bit more detail.
Now that you have updated your GPS with optimized settings, connected the GPS to the FC (with Auto Config option enabled), Betaflight should have already overwritten your GPS config. That’s exactly what we want. Go back to u-center, and export the config file, give it a name like “BF-Autoconfig.txt”.
 Now open the two config files we saved (optimized.txt and BF-autoconfig.txt), and do a compare (it’s a plugin in Notepad++), you can see exactly what settings Betaflight changed from our optimized config.
Now open the two config files we saved (optimized.txt and BF-autoconfig.txt), and do a compare (it’s a plugin in Notepad++), you can see exactly what settings Betaflight changed from our optimized config.
Copy all the lines starting with “CFG-MSG” from BF-autoconfig.txt file (the one that has been over-written by Betaflight) and replace them in our optimized config. Do not copy/replace any other lines!
 Save this config file as “optimized-final.txt”.
Save this config file as “optimized-final.txt”.
Now back to u-center, and load this config file “optimized-final.txt”. Don’t forget to check the option “Store configuration into BBR/Flash” (or you could also go to CFG (configuration) and click the Send button there to save changes to the flash memory), otherwise your config will be lost when you power off the GPS.

Then disconnect the GPS and power off the quad.
We should now disable “Auto Config” in Betaflight GPS settings. But before we do that, make sure you disconnect the GPS from the flight controller so it doesn’t over-write our GPS again! Power cycle the flight controller.

You can now connect the GPS to the quad and check if it’s working by going to the GPS tab in Betaflight Configurator (also check the GPS icon on top).
Viola!

That’s it. Let me know if this helped you get more satellites and faster lock. If you want you can always restore your original settings if you made a back up.
Здесь рассмотрим как настроить самый популярный GPS модуль u-blox NEO-6M. Даже если на сайте продавца написано, что модуль подходит для APM, то не факт, что в нем загружены верные настройки, поэтому нам необходимо сделать эту процедуру.
Вот так выглядят модули с RCTimer.com и MyAirBot.com:



На данных модулях GPS кроме самого модуля имеется flash-память для хранения настроек, конвертер логических уровней и стабилизатор питания 3.3В. На некоторых модулях конвертера может не быть, но память везде быть обязана! Если ее нет, то можно смело искать другой модуль. На модуле от MyAirBot.com на борту еще имеется внешний компас и светодиод для индикации 3D-fix.
Для настройки конфигурации нам понадобится:
1) Переходник USB-COM, например на микросхеме FT232RL (может быть и другой), который мы использовали для прошивки загрузчиков ATMega32u2 и ATMega2560.
2) Программа U-Center. Можно скачать с официального сайта по ссылке.
3) Конфигурационный файл с настройкой для APM. Скачиваем здесь. В архиве еще имеются сохраненные мной конфигурационные файлы.
Производим подключение переходника COM и модуля NEO-6M в соответствии с: VCC-VCC, GND-GND, RX-TX, TX-RX.

Подключаем разъем USB переходника в ПК, устанавливаем по необходимости драйвер, в диспетчере устройств смотрим, какой назначился порт для переходника.
Устанавливаем программу U-Center на ПК, запускаем.
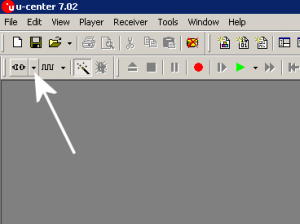
Нажмите кнопку с «волшебной палочкой» для установки автоматической скорости порта.
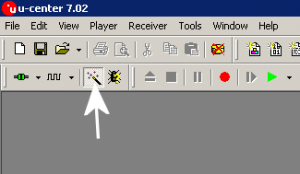
Выберите порт, который появился при подключении переходника.
После подключения в нижней части окна должны увидеть зеленый значок, это значит что модуль успешно подключился.
![]()
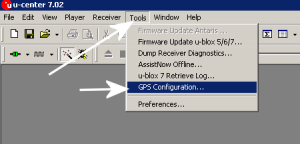
Нажимаем меню «Tools», «GPS Configuration» (GNSS Configuration в свежих версиях программы).
Выбираем конфигурационный файл «3DR-Ublox.txt» и в окне диалога нажимаем «Open». Ставим галку «Store configuration into BBR/Flash».
Нажимаем кнопку «File >> GPS».
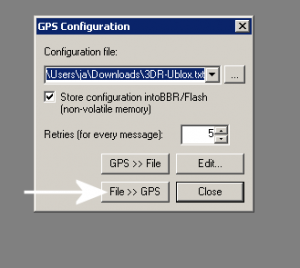
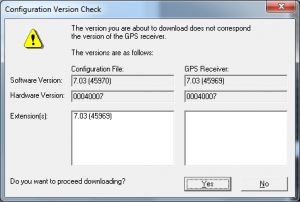
Появится окно с предупреждением о несоответствии версий конфигураций, где надо нажать «Yes» (если слева в колонке версия не отображается, то необходимо сбросить настройки модуля на стандартные. Для этого нажимаем меню «Receiver — Action — Revert Config», после чего пробуем загрузить настройки снова).
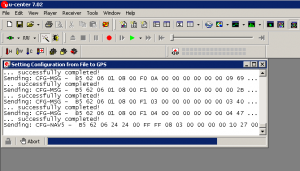
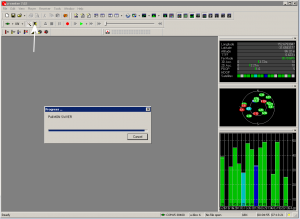
Далее начнется процесс загрузки конфигурации в модуль, о чем будет свидетельствовать движение индикатора прогресса. Если окно исчезло, значит все загрузилось, иначе отобразятся ошибки. Пробуем еще раз.
Раньше до заливки конфигурационного файла мы могли видеть цветные квадратики, полоски в окне спутников, а теперь их нет. Это нормально!
Чтобы успокоиться и посмотреть данные спутников, необходимо нажать кнопку «Debug».
Теперь полоски могут долго не появляться из-за того, что после загрузки конфигурации был произведен холодный старт модуля. Модуль должен заново получить данные от спутников, чему могут мешать естественные и искусственные объекты и т.д. Теперь просто ждем. Ждать можно долго, но обычно продохит 5-10 минут и данные начинают появляться. Модуль в этот момент лучше разместить у окна. Постепенно появится больше и больше данных.

В параметрах необходимо проверить параметр TP и настроить его. Цитирую Артема:
За моргание светодиода отвечает пункт TP (Timepulse), в выпадающем списке справа надо поставить «+1 risisng edge» и нажать внизу Send, чтоб настройка прописалась. Светодиод вновь радует глаз при 2D/3D Fix.
На данном этапе настройка модуля завершена и далее можно переходить к подключению.
Также можно воспользоваться другим способом настройки, используя плату APM в качестве связующего звена между ПК и модулем GPS. Для этого необходимо загрузить особую прошивку «APM2 / Ublox passthrough» на плату, которая качается по ссылке (+ прямая ссылка) и загружается через Mission Planner. ВНИМАНИЕ! Летная прошивка стирается и, после процедуры настройки модуля, необходимо опять загрузить летную прошивку, а так же произвести все настройки с нуля.
Ниже представлено видео данного процесса использования контроллера APM для настройки модуля GPS.
Update 15.06.2014:
Описание загрузки конфигурационного файла через контроллер APM.
Сергей Макаров:
Давайте с самого начала:
ПРОШИВАЕМ ЧЕРЕЗ APM:
Открываете среду Ардуино, в свойствах выбираете плату и порт.
Открываете пример: Файл -> Примеры -> Communication -> MultiSerialMega.
Жмете кнопку «Загрузить». APM теперь просто транслятор сигналов на скорости 9600.
Идете в U-Centre, загружаете конфиг, получаете ошибку, игнорируете.
Открываете среду Ардуино, в свойствах выбираете плату и порт.
Открываете пример: Файл -> Примеры -> Communication -> MultiSerialMega.
Редактируете две строчки:
Serial.begin(38400);
Serial1.begin(38400);
Жмете кнопку «Загрузить». APM теперь просто транслятор сигналов на скорости 38400.
Идете в U-Centre, меняете скорость на 38400, загружаете конфиг, уже не получаете ошибку, радуетесь.
Что может быть проще?
PS ну настройки APM ведь сохранили? Прошиваем любимую прошивку и восстанавливаем настройки только ручками!
Update 25.06.2014: Добавил ссылку на архив с конфигурационными файлами.
Update 11.08.2014: Видеоинструкция от Юлиана.
Update 14.11.2014: По просьбе Сергея добавил информацию от Артема по поводу параметра отображения 3D Fix светодиодом.
Update 25.05.2015/02.06.2015: Информация от Андрея об модуле ublox neo-m8n.
Развернуть
Приобрёл на Али Экспресс недавно за сумму около 50-ти американских енотов.
GPS-приёмник ublox neo-m8n для Pixhawk (и как было написано у продавца — для APM). У меня же — модуль APM 2.6.
Во-первых, пришлось перенести один пин в правую сторону, поскольку разъём приёмника — 6-пиновый, а на GPS-разъёме APM — 5 пин. Вскрытие самого модуля GPS с целью выяснения распиновки разъёма эффекта не дало — на плате приёмника они не обозначены вообще, присутствует только маркировка элементов.
Подключение к APM велось в соответствии с цветовой маркировкой проводников, идущих от разъёма приемника к APM, а точнее — кроме переноса проводника черного цвета на один пин вправо (в сторону проводника красного цвета+5В) и укорачивание самого разъёма приёмника на этот же один пин с помощью лезвия — с целью воткнуть его в APM, что в результате и было сделано.
После подачи питания на APM по USB модуль весело засветился зелёным цветом, что для начала-порадовало. Далее хотелось выяснить, выполняет ли приёмник свои функции по предназначению, имея в виду то обстоятельство. что на плате приёмника при осмотре было установлено наличие ещё одного светодиода — синего свечения, индицирующего наличие захвата спутников и функционирование в режиме 3DFIX.
Я живу на перовм этаже пятиэтажного дома, балкон — зарешёчен, рядом от моего дома на дистанции 30 метров — соседний пятиэтажный дом аналогичной постройки и приличное количество распускающихся деревьев, что делало задачу нормального функционирования приёмника маловероятной. Однако после вынесения приёмника сантиметров на 10-15 за пределы решётки, закрывающей балкон минуты через полторы на правом борту приёмника весело включился и замигал синий светодиод, подтверждающий 3D FIX. Запуск Mission planer и последующее подключение к нему APM мои предположения подтвердили, координаты и точка моего местонахождения были означены на карте с точностью, достойной всяческого уважения — учитывая место и условия расположения приёмника.
Дальнейшая заливка файла конфигурации в приёмник в U-center через APM после установки на последний кастомной прошивки оказалось делом несложным и быстрым.
Хотелось бы отметить следующие моменты:
— модуль оказался на редкость -беспроблемный, весьма точный и обладающий высокой чувствительностью.
— При заливке файла конфигурации в приёмник необходимо установить скорость порта в программе U-center, равную 38400, установить соединение на этой скорости и обязательно добиться чтобы приёмник увидел спутники и начал выдавать навигационную информацию. после этого заливка конфигурации с сайта APM не вызовет никакой проблематики.
Программа U-center является инструментом, позволяющим проводить практически ЛЮБЫЕ настройки самого модуля GPS. Если с ней хорошо разобраться. При установлении прошивки с сайта APM просмотрщиком конфигурации в U-center следует убедиться в том, что установлены — порт, скорость порта, скорость выдачи навигационной информации, а также — включение бинарного протокола UBX и отключение протокола NMEA выдачи навигационных данных. Хочу повторить, что внимательное изучение программы U-center позволит Вам конфигурировать приёмники UBLOX вручную, добиваясь максимально эффективной работы с APM.
Удачи Вам!
Практические моменты при выборе GPS — приёмника.
Доброго всем времени суток!
Описывая настройки gps-приёмника на базе ublox neo-m8n (и всё что с ними связано) возникают следующие наблюдения:
— как и в случае со всеми жизненными ситуациями, при комплектации Вашей конструкции приёмником GPS имеет место извечно актуальная проблема …выбора.
Дело в том, что на форумах и в постах присутствует мнения многих пользователей приёмников подобного рода, выбор которых, мягко говоря, для них самих же не является однозначным очевидным. Я постараюсь пояснить эти строчки. С моей точки зрения, при выборе GPS- приёмника имеет смысл руководствоваться следующим:
— производитель набора микросхемe приёмника должен быть достаточно известным в своей среде и иметь (для начала) положительные отзывы об использовании своих изделий.
-Далее — на сайте производителя для удобства и работы специалистов и рядовых пользователей должна иметься исчерпывающая соответствующая документация.
— также на сайте производителя обязательно должны быть программный инструментарий, позволяющий пользователю комфортно работать с выбранным изделием данного производителя.
При выборе навигационного приёмника Вы должны понимать, что, рекламируя свои новинки, производитель тем самым демонстрирует свою последовательность в данном направлении и желание выпустить модель, учитывающую недостатки предыдущей и стремление к совершенствованию.
С моей точки зрения, изделия UBLOX этим критериям вполне соответствуют. Это -европейский производитель и один из лидеров в данном направлении. Он обладает и серьёзным качественным производственным потенциалом и необходимой программной и прочей поддержкой своих изделий.
Далее идёт более приземлённая сторона вопроса. Всё дело в том, что подавляющее большинство GPS-приёмников из этих наборов микросхем собирается в широко известной нам стране и тайны из этого мы давно уже не делаем, поскольку сей факт нас вполне устраивает. То есть, как говорит мой родственник, периодически бывающий в местах производства этой электроники: -… кока-кола в баре может быть и американской, а вот лёд в ней — из ближайшего к бару канала рисового чека. С последующими выводами… Что следует из написанного мной? Перед покупкой приёмника внимательно собирайте статистику по отзывам на сайтах продавца, и на форумах.
Не жалейте 300 рублей на покупку дешевенького китайского цифрового мультиметра, небольшой отвертки и ресурсов терпения в 15 минут на исследования внутренностей приобретённого Вами GPS-приёмника на предмет наличия контакта от разъёма модуля на плате приёмника до разъема, предназначенного для включение в рейс-контроллер. Даже если Вы хронически не ладите с электроникой, всё не так уж сложно:
На одном из разъёмов будут чёрный и красный провода — это земля (GND) и плюс +. Напряжение питания — соответственно. Между ними — оставшаяся пара RX — TX, которые, в случае нежелания приёмника дружить с рейс-контроллером при выборе порта и установлении его скорости в 38400 бит, всегда возможно с поменять местами с помощью пинцета и иголки. Оставшиеся два проводка на отдельном разъеме, как Вы догадываетесь, — это I2C — интерфейс компаса. После того, как рейс -контроллер увидел Ваш приёмник, постарайтесь путём несложных манипуляций подключиться к программе U-center и с помощью просмотрщика уяснить состояние основных настроек приёмника. Возможно, после этого заливать файл конфигурации Вам не понадобится.
Многочисленные диспуты на тему работы одновременной GPS-приёмника с несколькими навигационными группировками вызывают у меня некоторый интерес, но не более того. Мой ublox neo-m8n декларирует готовность видеть практически ВСЕ существующие навигационные группировки,(и видит их) но выдаёт навигационные данные пока только по сигналам GPS в протоколе UBX.
Хочется в этой связи отметить отдельно, что в случае для Ublox конфигурация модуля в программе U-center позволяет осуществлять конфигурацию рабочих протоколов приёмника раздельно и на приём, и на выдачу навигационных данных- соответственно. (Задумайтесь на досуге — зачем?)
В случае необъяснимой тяги к экспериментам по одновременному приёму сигналов двух и более навигационных спутниковых группировок с моей точки зрения, более предпочтительна платформа Pixhawk, позволяющая корректно практически подключить два навигационных приёмника к одному рейс-контроллеру. А с особенностями их совместной работы Вам придётся разбираться…, но скорее всего — уже самостоятельно…
В качестве практического наблюдения имею возможность сообщить, что приём сигналов в разное время суток даёт реально различные результаты. Приём в вечернее и тёмное время суток, даже в условиях плотной облачности — более уверенный. Во всяком случае для выбранной мной модели приёмника ublox neo-m8n.
Попытаюсь написать короткое резюме по поводу прочитанного и написанного:
— Во- первых, на одном и том же наборе микросхем одного производителя GPS – ресиверы собираются почему-то СОВСЕМ НЕ ОДИНАКОВЫЕ…
— Обобщать по поводу изделий Ublox я не собираюсь в принципе, как минимум по одной причине, которую указал пунктом выше. Но считаю, что если в линейке этого производителя появился ресивер генерации M8, то выпуск этого изделия не обусловлен исключительно переводом производственных мощностей на новый техпроцесс для снижения энергопотребления в целях последующего увеличения времени автономной работы. Однозначно присутствуют и другие — более важные конструктивные особенности, – но это вовсе не означает, что эти самые особенности ДЛЯ Вас будут и наглядны и очевидны…
— Протокол NMEA – никогда не был абсолютным злом (во всяком случае я этого не писал). Но включенный одновременно с UBX доставит Вам не мало вопросов перед тем, как ваш коптер научиться держать фиксированную GPS – позицию. В программе U-center имеется на этот случай соответствующий пункт, позволяющий ресиверу адекватно воспринимать как один и другой протокол (или же оба — совместно) поступающие на вход ресивера, так и с лёгкостью выбирать тот из них, который представляется Вам наиболее актуальным для дальнейшего применения.
— Если сам APM имеет все легальные частоты работы шины, которые указываются в выборе возле доступного Вам порта, то ресивер имеет значения, хранящиеся в его настройках ПО УМОЛЧАНИЮ (9600) или же ВЫБИРАЕМЫЕ ВАМИ и устанавливаемые как РАБОЧИЕ из тех, которые будут функциональны при его подключении к APM. Автовыбор частоты не всегда работает корректно и об этом уже неоднократно упоминалось.
Подключение и конфигурация ресивера через FTDI – переходник имеет свои особенности и может (после переподключения сконфигурированного приёмника к APM) Вас удивить, а что ещё более вероятно – озадачить.
“Выбор частоты обновления прямо пропорционален baud rate.” Вывод мной комментироваться не будет. Считаю что было бы уместным предположить, что в случае с NEO M8N частота обновления актуальна НЕ ТОЛЬКО ДЛЯ ОПТИМАЛЬНОЙ РАБОТЫ С APM. Если есть желание разобраться с настройками и протоколами – сохраните Ваши текущие настройки в файл, сбросьте настройки ресивера в дефолтные и попытайтесь проанализировать просмотрщиком конфигурации состояние этих настроек.
В качестве дополнения хочу напомнить один из комментариев, смысл которого заключался в том, что APM вполне удачно взаимодействует с приёмником, над которым не производилось ВООБЩЕ НИКАКИХ МАНИПУЛЯЦИЙ по его конфигурированию. И коптер практически держит позицию в соответствующем режиме. Кстати. Речь шла о приёмнике Ublox генерации M8…
Update 02.06.2015: Информация от Ильи об модуле ublox neo-m8n.
Развернуть
Хочу отметить, что я в коптероводстве недавно, а уж с GPS вообще никогда никак связан не был совсем. Так что всё, что я здесь пишу — исключительно личный опыт (и некоторое количество гугления)
Отвечу всем — и, надеюсь, надолго для себя закрою тему)
*у меня 3.2.1 — но, наверное, не суть*
1.
3. Все пишут, что в 3.2 NMEA нет. Люди специально компилируют кастомные прошивки с NMEA.
Вот, собственно, я так же думал.
пока не получил по недосмотру м8н БЕЗ ЕЕПРОМ, жёстко сконфигурированный на NMEA 9800. И коптер — висел в точке! а значит, либо верно Ваше понимание того, что APM полностью конфигурирует ublox, вплоть до протоколов — либо….мозги понимают NMEA
в пользу своей точки зрения добавлю, что сейчас у меня нормальный м8н сконфигурирован на вывод Ublox+NMEA (дефолтная установка), но я добился, что в u-centre отображается стабильный NMEA без прерываний на UBX.
И, опять же, когда у меня был сконфигурирован вывод только UBX, коптер улетал в Россию.
Насколько я понимаю, всё это вкупе свидетельствует о том, что всё же коптер опирается на NMEA
Или же включение дополнительно NMEA как-то влияет на восприятие коптером UBX…но это за гранью моего понимания.
2. SBAS, кстати, по мнению некоторых, негативно влияет на точность (и барометр)
Точность — да, барометр — не знаю. Но сейчас заметил, что коптер иногда необъяснимо теряет высоту на метр, а потом возвращается. Может, вы и правы с преконфигурацией апм……
3.
Считаю что было бы уместным предположить, что в случае с NEO M8N частота обновления актуальна НЕ ТОЛЬКО ДЛЯ ОПТИМАЛЬНОЙ РАБОТЫ С APM
. нет-нет, и я так тоже не считаю.
Я лишь заметил, что повышение частоты обновления при неизменно низкой скорости порта — в какой-то момент приводит к пропускам пакетов — или, даже, регулярному выпадению спутников на долю секунды.
В связи с чем, рекомендую обратить на это внимание тем, кто будет играть с частотой обновления.
Мне это наблюдение позволило получить 4ГЦ и стабильный поток пакетов без прерывания. Всё.
Если честно, я по горло сыт мучениями с GPS вместо полётов, — так что, думаю, флаг будет нести кто-то другой.
*а вот по поводу сохранения настроек, буду признателен
Потому как у меня при выборе Save GNSS вечно вылезали таймауты по ВСЕМ параметрам. Или по части.
А action — save config — я так и не понял, работает ли — и если да, то куда сохраняет.
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.