
Tumbling robot — это интересное устройство, которое может передвигаться по наклонной поверхности, смешно переворачиваться и продолжать движение. Собрать такого робота самостоятельно несложно, если иметь под рукой все необходимые детали и инструменты.
Для начала, вам понадобятся следующие материалы и детали: пластиковый корпус, два колеса с моторами, а также контроллер и аккумулятор. Также стоит подготовить набор инструментов: отвертки, пинцет, паяльник и припой. Когда все готово, можно приступать к процессу сборки.
Шаг 1: подключите моторы к контроллеру. Для этого припаяйте провода от моторов к соответствующим выводам контроллера. Убедитесь, что провода надежно припаяны, чтобы избежать перебоев в работе.
Шаг 2: закрепите колеса на моторах. Для этого вставьте оси колес в соответствующие отверстия моторов и фиксируйте их с помощью гаек или винтов.
После выполнения первых двух шагов, ваш Tumbling robot получит возможность передвигаться. Осталось только собрать корпус и подключить аккумулятор.
Содержание
- Шаг 1: Подготовка материалов
- Выбор комплектации
- Придумываем дизайн робота
- Шаг 2: Сборка корпуса
- Скручиваем детали винтами
- Устанавливаем аксессуары
- Шаг 3: Подключение двигателя
- Подготовка проводов
Шаг 1: Подготовка материалов
При сборке Tumbling robot вам понадобятся следующие материалы:
| 1. | Корпус робота |
| 2. | Моторы |
| 3. | Маленькие колеса |
| 4. | Аккумулятор |
| 5. | Плата управления |
| 6. | Кнопки управления |
| 7. | Провода |
| 8. | Инструменты для монтажа |
Убедитесь, что у вас есть все необходимые материалы перед переходом к следующему шагу.
Выбор комплектации
Перед тем, как приступить к сборке Tumbling robot, нужно правильно выбрать комплектацию.
Основными компонентами Tumbling robot являются:
- Модуль платформы: это основа робота, на которую будут закрепляться все остальные компоненты. При выборе модуля платформы важно обратить внимание на его размеры, материал и возможности для крепления других элементов.
- Моторы: они отвечают за движение робота. Необходимо выбрать моторы, которые имеют достаточную мощность и подходят по размерам и характеристикам для выбранной платформы.
- Контроллер: это устройство, которое управляет работой моторов. Контроллер должен быть совместим с выбранными моторами и иметь необходимые функции для реализации задуманной программы.
- Датчики и аксессуары: они помогают роботу получать информацию о внешней среде и взаимодействовать с ней. В зависимости от того, какие возможности вы хотите реализовать у своего Tumbling robot, выбирайте датчики и аксессуары, которые вам нужны.
Важно: перед покупкой комплектации, обязательно ознакомьтесь с описанием и характеристиками каждого компонента, чтобы убедиться в их совместимости и соответствии вашим требованиям и целям.
Выбрав правильную комплектацию Tumbling robot, вы сможете собрать робота, который будет соответствовать вашим ожиданиям и потребностям.
Придумываем дизайн робота
Прежде чем приступить к сборке робота, нужно придумать его дизайн. Внешний вид играет не малую роль, поэтому постарайтесь сделать робота интересным и оригинальным. Робот может быть разных форм и размеров, а также быть выполнен из различных материалов.
Некоторые люди предпочитают создавать роботов, которые напоминают животных или персонажей из фильмов. Другие предпочитают более абстрактные и экспериментальные дизайны. Вы можете выбрать любой стиль, который вам нравится.
Важно помнить, что дизайн робота не должен только выглядеть интересно, но и быть функциональным. Дизайн должен соответствовать целям и задачам робота. Убедитесь, что добавляете элементы, которые помогут роботу выполнять поставленные перед ним задачи.
Если у вас есть идеи, но вы не уверены, как их реализовать, вы можете обратиться к готовым примерам дизайнов роботов из различных источников. Они могут вдохновить вас и помочь определиться с тем, как вы хотите, чтобы ваш робот выглядел.
После того, как вы определитесь с дизайном робота, можно приступать к его сборке. Не забудьте проверить, что у вас есть все необходимые компоненты и инструменты.
Шаг 2: Сборка корпуса
1. Возьмите пластиковую панель и разметьте на ней квадрат размером 10×10 см, используя линейку и маркер.
2. Отрежьте пластиковую панель по маркировке, используя пилку или ножницы.
3. Возьмите две полоски пластика и приклеите их по краям отрезанной пластиковой панели с помощью клея для пластика. Они будут служить как боковые стенки корпуса робота.
4. Отмерьте и отрежьте пластиковые полоски для формирования верхней и нижней частей корпуса робота.
5. Приклейте верхнюю и нижнюю пластиковые полоски к боковым стенкам корпуса, используя клей для пластика.
6. Установите моторы в отверстия на боковых стенках корпуса и закрепите их винтами или клеем.
7. Установите колеса на выходные валы моторов.
8. Проверьте, что корпус робота прочно собран и все соединения надежно закреплены.
Примечание: Во время сборки корпуса робота будьте аккуратны и следите, чтобы все детали были правильно соединены. Неправильная сборка может привести к неполадкам в работе робота.
Скручиваем детали винтами
После того, как все детали робота проверены и подготовлены, необходимо начать процесс сборки. В нашем случае, основные детали робота будут скрепляться с помощью винтов.
Перед началом сборки рекомендуется ознакомиться со схемой сборки и понять последовательность скручивания деталей. Некоторые винты могут иметь различные размеры и не подходить для всех деталей, поэтому важно правильно выбрать винты для каждой конкретной детали.
Для начала, возьмите первую деталь, которую необходимо скрутить с другими. Поднесите винт к отверстию детали и аккуратно затяните его с помощью отвертки или ключа. Будьте внимательны, чтобы не повредить деталь или не перекрутить винт.
Повторите этот процесс для всех остальных деталей, следуя схеме сборки. Продолжайте скручивать детали винтами, пока не завершите сборку робота. Важно не спешить и внимательно следить за тем, чтобы все детали были правильно скреплены.
После скручивания всех деталей винтами, рекомендуется проверить надежность соединений и убедиться, что робот собран корректно. Если обнаружены какие-либо проблемы или несоответствия, необходимо исправить их, прежде чем продолжить дальнейшую работу с роботом.
Устанавливаем аксессуары
После того как вы собрали основной корпус Tumbling robot, настало время установить различные аксессуары, которые придают роботу его особенный облик.
В комплекте с Tumbling robot поставляются различные аксессуары, такие как шляпа, очки, шнурки и другие мелочи для настройки и декорирования робота.
Перед установкой аксессуаров, убедитесь, что все необходимые отверстия соответствуют их размеру и расположению.
Прикрепите аксессуары к роботу, используя предоставленные крепежные элементы и инструкции. Обычно это делается с помощью винтов или кнопок, которые легко закрепить на корпусе.
Каждый аксессуар должен быть установлен надежно, чтобы избежать его падения или потери в процессе работы робота.
После установки аксессуары не только придают роботу эстетическую привлекательность, но и могут влиять на его функциональность.
注意: Будьте осторожны при установке и соблюдайте инструкции производителя для избежания поломок или повреждений робота.
Шаг 3: Подключение двигателя
1. Возьмите модуль двигателя и подключите его к макетной плате с помощью проводов. Обратите внимание на правильную ориентацию подключения.
2. Подключите макетную плату к компьютеру с помощью USB-кабеля.
3. Загрузите программный код для управления двигателем на макетную плату. Для этого откройте Arduino IDE, выберите правильную модель платы и порт в меню «Инструменты» и загрузите код.
4. После успешной загрузки кода, подключите питание к макетной плате и включите двигатель. Убедитесь, что он работает и вращается в нужном направлении.
5. Если двигатель работает неправильно или не вращается, проверьте подключение и код программы на наличие ошибок. Исправьте ошибки и повторите шаги с 3 по 4.
Примечание: При подключении двигателя будьте аккуратны и осторожны, чтобы избежать возможных травм или повреждений.
Подготовка проводов
Перед тем, как приступить к сборке Tumbling robot, важно правильно подготовить провода. Для этого потребуется:
1. Провода разных цветов и длин. Рекомендуется использовать провода разных цветов для удобства идентификации при последующей сборке.
2. Кусачки и пассатижи. Приступайте к сборке только с использованием инструментов. Кусачки и пассатижи помогут вам отрезать провода нужной длины и обработать их концы.
3. Штекеры и разъемы. Для соединения проводов можно использовать различные штекеры и разъемы. Убедитесь, что они качественные и надежно фиксируют провода.
После того, как вы подготовили все необходимые материалы и инструменты, можно приступать к сборке Tumbling robot. Помните, что правильно подготовленные провода гарантируют надежное соединение и стабильную работу робота.
Робототехника стала одной из самых популярных областей среди людей, которые хотят научиться создавать и программировать своих собственных роботов. Одним из интересных проектов, которые можно реализовать в домашних условиях, является сборка тамблинг-робота. Тамблинг-робот – это робот, способный двигаться по горизонтали и вертикали, преодолевая препятствия и выполняя различные трюки.
В этой статье мы расскажем вам, как собрать тамблинг-робота своими руками. Мы предоставим вам пошаговую инструкцию и поделимся полезными советами, чтобы помочь вам в этом увлекательном процессе. Главное – не бойтесь экспериментировать и пробовать различные варианты, ведь робототехника – это настоящее искусство!
Прежде чем приступить к сборке тамблинг-робота, вам необходимо определиться с базовым набором деталей и компонентов. Подумайте о том, какой тип робота вы хотите создать и какие функции ему нужно выполнять. Вы можете использовать готовые наборы для сборки роботов или собрать все необходимые компоненты самостоятельно. В любом случае, вам потребуются моторы, колеса, датчики и платформа для сборки. Также не забудьте о необходимых инструментах, таких как паяльник и набор отверток.
Содержание
- Пошаговая инструкция по сборке тамблинг-робота
- Выбор необходимых компонентов
- Сборка основной конструкции
- Установка двигателей и электроники
- Соединение компонентов
- Подключение питания и проверка работы
- Добавление дополнительных функций
Пошаговая инструкция по сборке тамблинг-робота
Шаг 1: Подготовка необходимых материалов и инструментов:
Для успешной сборки тамблинг-робота вам понадобятся следующие материалы и инструменты:
* Комплектация тамблинг-робота (шасси, двигатель, аккумулятор и др.)
* Винты и гайки для закрепления деталей
* Кусачки для отрезания проводов
* Паяльная станция для пайки проводов
* Скрепки или зажимы для фиксации деталей
* Отвертки различных размеров для монтажа элементов
* Инструкция по сборке тамблинг-робота
Шаг 2: Сборка шасси:
1. Следуя инструкции, соберите шасси тамблинг-робота, закрепив все детали вместе.
2. Пользуясь скрепками или зажимами, убедитесь, что шасси прочно и безлюдно закреплены.
Шаг 3: Установка двигателя:
1. Установите двигатель на шасси согласно указаниям в инструкции.
2. Закрепите двигатель на шасси, используя предоставленные в комплекте винты и гайки.
Шаг 4: Подключение аккумулятора:
1. Подключите аккумулятор к шасси и двигателю в соответствии с инструкцией, используя провода и пайку.
2. Убедитесь, что все провода надежно зафиксированы и не могут случайно отсоединиться.
Шаг 5: Завершающие действия:
1. Проверьте, что все детали сборки тамблинг-робота надежно закреплены и не имеют люфтов.
2. Проверьте, что все провода правильно подключены и не соприкасаются с деталями двигателя.
3. Убедитесь, что аккумулятор заряжен и готов к использованию.
4. Перед включением тамблинг-робота прочитайте инструкцию и ознакомьтесь с основными правилами безопасности.
Теперь ваш тамблинг-робот готов к использованию! Пользуйтесь им с удовольствием и не забывайте обновлять его программное обеспечение для получения новых функций!
Выбор необходимых компонентов
Для сборки тамблинг-робота вам понадобятся следующие компоненты:
— Микроконтроллер Arduino Nano;
— Двигатели постоянного тока с редукторами;
— Колеса для двигателей;
— Аккумуляторная батарея;
— Драйвер двигателей (Motor driver);
— Провода для подключения компонентов;
— Датчики уклона и вращения;
— Корпус для робота.
Выберите компоненты, учитывая требования и особенности вашего проекта. Убедитесь, что все компоненты совместимы друг с другом и подходят для вашего уровня навыков в сборке роботов.
Сборка основной конструкции
Для сборки основной конструкции тамблинг-робота вам потребуются следующие компоненты:
- Детали шасси
- DC-моторы
- Колеса и диски
- Аккумулятор
- Arduino-плата
- Платформа для установки Arduino
- Соединительные провода
- Отвертки и пинцеты для монтажа
Шаги по сборке основной конструкции:
- Сначала соберите шасси, следуя инструкциям, прилагаемым к комплекту.
- Подключите DC-моторы к шасси с помощью соединительных проводов. Убедитесь, что провода надежно закреплены и свободно подвижны.
- Установите колеса и диски на оси DC-моторов. Обратите внимание на правильную ориентацию колес и убедитесь, что они надежно закреплены.
- Установите аккумулятор на шасси и проверьте, что он надежно фиксируется. Подключите его к DC-моторам с помощью соединительных проводов.
- Установите Arduino-плату на специальную платформу и закрепите ее при помощи винтов. Подключите ее к шасси с помощью соединительных проводов.
- Проверьте, что все провода правильно подключены и надежно закреплены. Выполните тестовую проверку работы моторов и убедитесь, что все функционирует корректно.
После выполнения всех этих шагов основная конструкция тамблинг-робота будет готова к подключению дополнительных компонентов и программированию. Убедитесь, что все соединения надежны и провода не мешают движению робота.
Установка двигателей и электроники
Для сборки тамблинг-робота необходимо установить двигатели и необходимую электронику. Следуйте инструкциям ниже, чтобы правильно выполнить этот этап сборки:
| Шаг | Действие |
|---|---|
| 1 | Установите двигатели на основу робота. Они должны быть расположены симметрично относительно центра основы. |
| 2 | Подключите к каждому двигателю соответствующие провода. Обязательно проверьте, чтобы провода были надежно закреплены и не создавали перекрытий другим элементам сборки. |
| 3 | Установите электронные компоненты на основу робота. Это может быть плата микроконтроллера, датчики и прочее. Расположите компоненты таким образом, чтобы они не мешали движению робота и были удобно доступны для подключения и настройки. |
| 4 | Проверьте правильность установки и подключения всех двигателей и электронных компонентов. Убедитесь, что провода подключены в соответствии с схемой сборки и нет перекрытий или обрывов. |
| 5 | Закрепите все установленные элементы на основу робота с помощью крепежных элементов или клея. Обязательно проверьте, чтобы все элементы были надежно закреплены и не создавали лишних вибраций или перемещений. |
После завершения установки двигателей и электроники, ваш тамблинг-робот будет готов к дальнейшим этапам сборки и программирования. Убедитесь, что все детали правильно установлены и работают корректно, прежде чем переходить к следующему этапу.
Соединение компонентов
При сборке тамблинг-робота необходимо соединять различные компоненты для создания рабочей конструкции. Ниже представлены основные шаги по соединению компонентов:
- Начните с соединения основы робота и колес. Установите колеса на нижнюю часть основы и закрепите их с помощью предоставленных крепежных элементов.
- Присоедините электромоторы к основе и убедитесь, что они крепко закреплены. Ориентируйтесь на инструкции по сборке, чтобы правильно подключить электромоторы к плате управления.
- Присоедините плату управления к основе робота и установите ее в соответствующее место на конструкции.
- Подключите аккумулятор к плате управления, обеспечив правильное соединение положительного и отрицательного зарядов.
- Соедините датчики с платой управления, следуя инструкциям производителя и учитывая их правильное размещение на тамблинг-роботе.
- Проверьте соединения и убедитесь, что все компоненты прочно закреплены и правильно подключены.
После завершения соединений компонентов, вы можете приступить к программированию и настройке вашего тамблинг-робота.
Подключение питания и проверка работы
После того, как вы собрали тамблинг-робота, необходимо правильно подключить его к источнику питания. В большинстве случаев тамблинг-роботы используют батареи или аккумуляторы для питания.
Перед подключением убедитесь, что у вас есть все необходимые кабели и разъемы. Обратите внимание на полярность при подключении питания – положительный и отрицательный выводы должны быть правильно подключены. Если полярность подключения неверная, это может привести к повреждению электронных компонентов вашего робота.
После подачи питания, внимательно наблюдайте за поведением тамблинг-робота. Убедитесь, что все его механизмы функционируют правильно. Особое внимание уделите двигателям и сенсорам – они должны работать безупречно.
Если обнаружите какую-либо неисправность или необычное поведение робота, проверьте все подключения и убедитесь, что они сделаны правильно. Если проблема не устраняется, обратитесь к руководству по сборке и настройке тамблинг-робота или обратитесь за помощью к специалистам в данной области.
Добавление дополнительных функций
Когда вы освоили основные навыки сборки тамблинг-робота, вы можете попробовать добавить дополнительные функции, чтобы улучшить его возможности. Вот несколько идей, которые вы можете реализовать:
1. Добавление светодиодов: Вы можете прикрепить светодиоды к роботу и настроить программу для их управления. Это добавит интерактивность и поможет визуализировать работу робота.
2. Управление через Bluetooth: Вы можете добавить модуль Bluetooth к роботу и настроить программу для управления им с помощью мобильного устройства. Это позволит вам управлять роботом из любого места в вашем доме.
3. Датчики расстояния: Добавление датчиков расстояния поможет роботу избегать столкновений с препятствиями. Вы можете настроить программу для автоматического управления роботом, чтобы он уклонялся от препятствий.
4. Расширение функциональности: Вы можете добавить другие дополнительные модули или компоненты, такие как датчики света или звука, чтобы робот мог реагировать на свет или звуковые сигналы.
5. Расширение программной логики: Вы также можете настроить программу робота для выполнения более сложных действий. Например, вы можете настроить его для следования за линией или для решения задач лабиринта.
Это лишь некоторые идеи, которые могут помочь вам улучшить вашего тамблинг-робота. Не ограничивайтесь этими идеями — экспериментируйте и наслаждайтесь процессом создания своего собственного робота!

01
03
02
© GAKKEN
First published in Japan by Gakken Co.,Ltd., Tokyo
MADE IN CHINA P38-GK013-81001000
Amazing and Amusing Walk!
Falling and stumbling, Co-Bot will never
give up!
Let’s go Forward!
Co-Bot has amazing power and energy.
Let’s Go Mode
Let’s cheer on Co-Bot for neat somersaults!
Never tiring somersault Mode
Swinging arms
widely, dance
around with great
balance!
Wobbly-funky!?
Dance Mode
Co-Bot can walk! No
matter how many
falls and stumbles,
Co-Bot gets up
without any help!
How does Co-Bot
maneuver these
complex motions?
The secret is in its
original mechanism.
The 3 sensors at the belly, the back, and the
leg of Co-Bot make it possible. Sensors are
pushed by falling and getting up and change
the internal gears.
Tumbling
Robot
Tumbling
Robot
CO-BOT 3 MODES
A single motor produces
amazing actions!
Why and how?
Secrets of Co-bot
THE SECRET OF
THE 3 SENSORS
AGES
8+
A Science Guide with Supplemental Experiment Kit
Tumbling RobotTumbling Robot
Gears and
Cranks
You can learn
the basics of the machine!
Please purchase 2 AA
batteries separately.
A single motor produces
amazing actions!
A single motor produces
amazing actions!

01
03
02
© GAKKEN
First published in Japan by Gakken Co.,Ltd., Tokyo
MADE IN CHINA
P38-GK013-81001000
Amazing and Amusing Walk!
Falling and stumbling, Co-Bot will never
give up!
Let’s go Forward!
Co-Bot has amazing power and energy.
Let’s Go Mode
Let’s cheer on Co-Bot for neat somersaults!
Never tiring somersault Mode
Swinging arms
widely, dance
around with great
balance!
Wobbly-funky!?
Dance Mode
Co-Bot can walk! No
matter how many
falls and stumbles,
Co-Bot gets up
without any help!
How does Co-Bot
maneuver these
complex motions?
The secret is in its
original mechanism.
The 3 sensors at the belly, the back, and the
leg of Co-Bot make it possible. Sensors are
pushed by falling and getting up and change
the internal gears.
Tumbling
Robot
Tumbling
Robot
CO-BOT 3 MODES
A single motor produces
amazing actions!
Why and how?
Secrets of Co-bot
THE SECRET OF
THE 3 SENSORS
AGES
8+
A Science Guide with Supplemental Experiment Kit
Tumbling Robot
Tumbling Robot
Gears and
Cranks
You can learn
the basics of the machine!
Please purchase 2 AA
batteries separately.
A single motor produces
amazing actions!
A single motor produces
amazing actions!

Tumbling
Tumbling
AGES
A Science Guide with Supplemental Experiment Kit
8+
A single motor produces
amazing actions!
Robot
Robot
CO-BOT 3 MODES
Amazing and Amusing Walk!
01
Falling and stumbling, Co-Bot will never
give up!
Let’s go Forward!
Co-Bot has amazing power and energy.
Let’s Go Mode
02
Let’s cheer on Co-Bot for neat somersaults!
Never tiring somersault Mode
A single motor produces
A single motor produces
amazing actions!
amazing actions!
THE SECRET OF
THE 3 SENSORS
The 3 sensors at the belly, the back, and the
leg of Co-Bot make it possible. Sensors are
pushed by falling and getting up and change
the internal gears.
© GAKKEN
First published in Japan by Gakken Co.,Ltd., Tokyo
Swinging arms
03
widely, dance
around with great
balance!
Wobbly-funky!?
Dance Mode
Why and how?
Secrets of Co-bot
Co-Bot can walk! No
matter how many
falls and stumbles,
Co-Bot gets up
without any help!
How does Co-Bot
maneuver these
complex motions?
The secret is in its
original mechanism.
Tumbling RobotTumbling Robot
Gears and
Cranks
MADE IN CHINA P38-GK013-81001000
Please purchase 2 AA
You can learn
the basics of the machine!
batteries separately.
CONTENTS
04
05
07
08
10
12
14
16
18
20
Let’s play with «Co-bot»!
Let’s assemble «Co-bot»
Let’s operate «Co-bot»
Co-bot 3 modes
Why and how? Secrets of Co-bot
Co-bot’s getting up action
Mechanism of machines master class- Gears, Belts, & Chains
Mechanism of machines master class- Crank
Mechanism in state of the art robots
Troubleshooting Q&A
TUMBLING ROBOT
TUMBLING ROBOT
JR. SCIENTIST
2
3
FALL, GET UP AND FALL AGAIN
TUMBLING
Complete
ROBOT
LET’S PLAY
WITH «CO-BOT»!
AMAZING AND
AMUSING WALK!
Amazing Actions with a single motor!
Brilliant work of gears and cranks!»
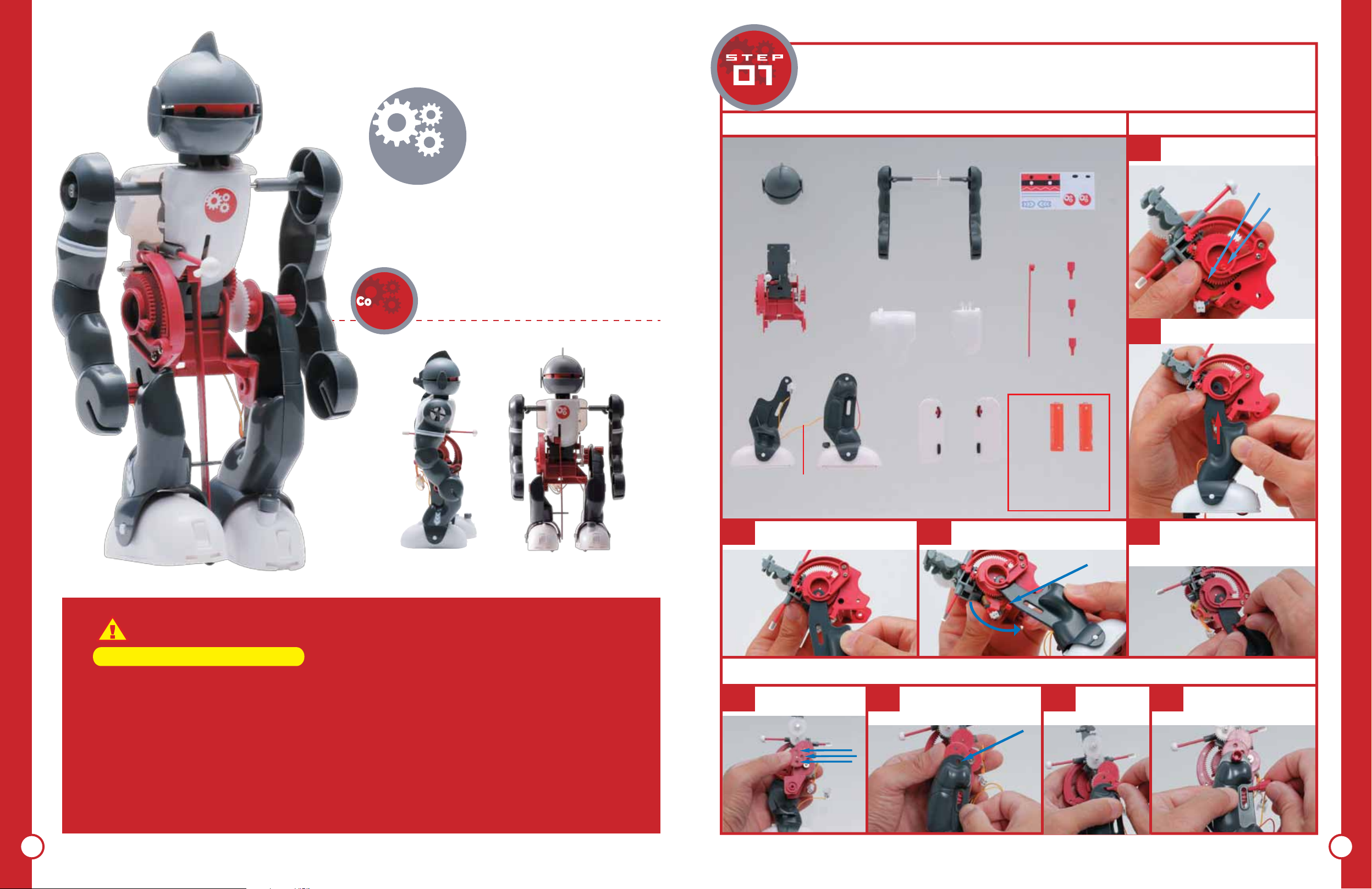
LET’S ASSEMBLE «CO-BOT»
Parts list
Head
Hip assembly
Legs (Left and Right)
Left Right
Arms Decals
Back Chest
Sole of feet
Leg
Sensor
3 pins
Right Leg Assembly
01
02
Turn the gear in the hip so
the peg is positioned down.
gear
Insert right leg from side slit.
peg
CAUTION!
Please read before assembling this product (adults/supervisors must read)
• Follow the instruction manual for assembly and operation of this product for the safety.
• Be cautious with small parts. They are choke hazards.
• Handle sharp corners and pointy parts with caution.
• Do not leave the product on the floor. Injury can occur by stepping on it.
• Do not coil the wires on body parts. This may cause injury.
• Do not touch the gears during the operation. This may cause injury.
• Do not experiment in the road.
• Do not experiment near river or pond.
• Do not experiment outdoor in the evening. It is dangerous due to poor visibility.
• Hard tugging and over stretching of the electrical wires may damage the wire.
• Pulling the arms and legs of the robot in the wrong direction may damage the product.
• Forcing to stop the movement of the robot by hand during the operation may damage the
product and/or cause injury.
• Do not disassemble the robot by unscrewing. It may damage the product.
• Do not use the damaged and deformed parts.
• Store away from toddlers’ reach after completing the experiment.
Please purchase 2 AA
Handle with caution! Two legs
are attached by a lead wire.
03
Slightly lift the top gear and
hook the leg hole on the peg.
left Leg Assembly (This is «Let ‘Go Mode» in page 9)
Line up the holes as
01
shown in the picture.
02
04
line up the left leg hole and
bottom hole of the gear as
shown in the picture.
Move the leg carefully over the
hip hook and bring the leg down.
batteries separately.
Alkaline batteries are
recommended due to
their weights.
hip hook
03
05
Push the pin
firmly until
it stops.
Push a pin
firmly in until
it stops.
Line up the lower hole of the hip
assembly and the elongated leg
hole. Insert a pin into the two
holes so two parts are joined.
Line up the lower hole of
04
the hip assembly and the
elongated leg hole and
insert a pin.
TUMBLING ROBOT
* Recycle and dispose according local regulation.
* The photo images of the product may vary slightly from
the actual product in colors and/or small details.
JR. SCIENTIST
4 5
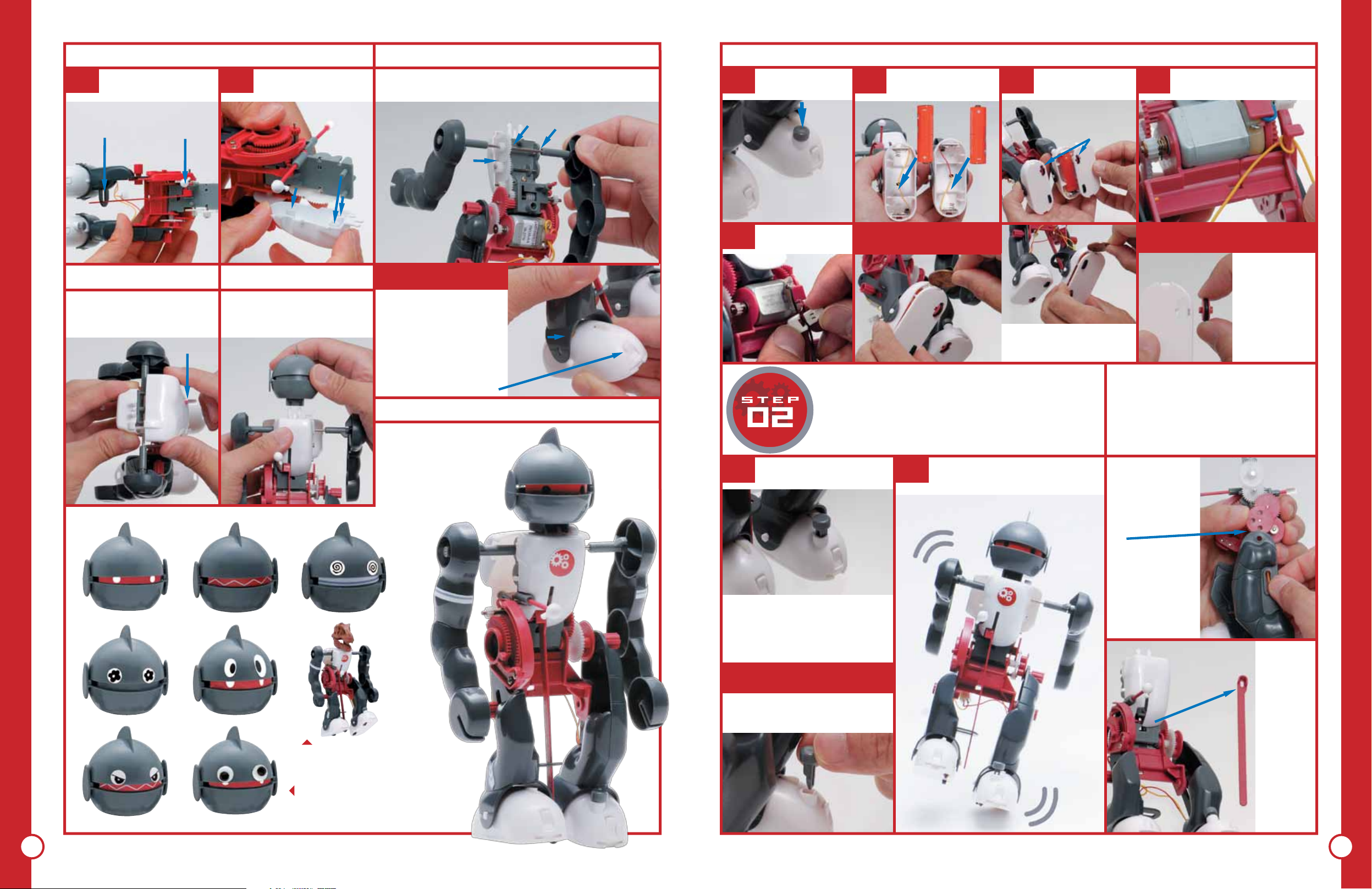
Chest Assembly
Arms Assembly
Electrical Set Up
Hold hip-leg assembly
01
sideway and attach
the leg sensor.
First, pull
through
the hole.
Next, insert
one end into
the hip hook.
Back Installation
Line the back so the back
sensor should penetrate the
back through the hole and
install the back.
02
Align pegs and
grooves and snap on
the chest.
Head Installation
Align tongues and holes.
Push the head straight down.
Line up the gears as shown in the picture. Snap on the
arm axis rod into the two side grooves (catch) of the
chest. Push the axis rod firmly in until it clicks.
If the foot
detaches…
Insert the foot back into
the bracket by slightly
opening the bracket.
Be careful not to insert
the foot backward.
Orientation of Toes and
heels is crucial for
walking.
* toes have big grooves
bracket
How to use Decals
Be creative and find
your own expressions!
You can use a blank
sticker and draw your
own design, too!
01
05
01
Keep foot button
pushed in.
Foot button pushed
in position switches
the robot off.
Plug the
connectors.
02
batteries.
To exchange
batteries…
LET’S OPERATE
«CO-BOT»
Pulling the foot button up
will turn the switch on.
Be careful with
positive and negative
orientations of the
right
foot
02
Co-Bot starts moving vigorously. Wobbly-funky!?
Attach the soles of
03
feet. Be careful with
right and left soles!
*Wheels are
positioned
inside front.
left
foot
Pry the sole off using
a coin at the grooves
on toes and heel.
04
Twist the yollow lead wire
around the hip hook (one turn).
If the wheels
detach…
Push the
square axle
of the wheel
into the
wider hole.
There are 3 modes of Co-Bot. The
features of 3 modes are illustrated in
the next page.
Dance Mode
Orient the gear
as shown in the
picture, pin the
left leg on the
bottom hole.
Not recommended to operate
the robot on tables and furniture
that can be scratched and
damaged. Operating the robot
on the carpeted floor will make
the robot fall down easier.
IF THE FOOT BUTTON
(SWITCH) DETACH …
Insert the button back into the
hole aligning the pointy side
with the toes.
Replaced with a
head from different
toy figure!
Example of using
moving eye stickers.
(stickers not included.)
Never tiring
Somersault
Mode
Remove leg
sensor from
the chest.
JR. SCIENTIST
6 7
TUMBLING ROBOT
- Home
- Brands
- Jr. Scientist Manuals
- Jr. Scientist Tumbling Robot
- Jr. Scientist Tumbling Robot Manual
Download or browse on-line these Manual for Jr. Scientist Tumbling Robot Toy.
Jr. Scientist Tumbling Robot Manual Information:
|
This manual for Jr. Scientist Tumbling Robot, given in the PDF format, is available for free online viewing and download without logging on. |
Download Manual |
Summary of Contents:
|











