
В этом руководстве показано как настроить TBS Crossfire для работы с Taranis X9D Plus и Jumper T16. Я покажу вам как подключить приемник к полетному контроллеру и как настроить Betaflight. Аналогично можно настроить и другие передатчики с прошивкой OpenTX.
Оригинал: TBS Crossfire Setup For Taranis & T16 (Betaflight)
Дополнительная информация: как выбрать хорошую аппаратуру управления?
Содержание
- Что особенного в Crossfire?
- Обновление прошивки
- Ставим радиомодуль Crossfire в Taranis
- Настраиваем Taranis для использования Crossfire
- Подключаем приёмник к полетному контроллеру
- Привязываем приёмник Crossfire к передатчику
- Настраиваем приемник в Таранисе
- Настраиваем Betaflight для работы с Crossfire
- Устанавливаем антенну приемника
- Настраиваем LUA скрипты
TBS Crossfire — это популярная система радиоуправления для полетов на дальние расстояния.
Одна из составных частей — внешний радиомодуль, который устанавливается в отсек аппаратуры управления типа Taranis или Nirvana (англ), так что вы сможете использовать весь функционал OpenTX.
Crossfire работает на частоте 900 МГц, более низкая частота означает, что сигнал лучше проходит через препятствия. По сравнению с традиционными системами, работающими на частоте 2,4 ГГц, это дает больший радиус работы и более надежный прием сигнала. Однако есть и недостаток — более длинные и крупные антенны.
Frsky Taranis с двухантенными приемниками (R-XSR и X4R-SB) теоретически дает до 1,5 км, чего более чем достаточно для большинства пилотов мини-коптеров. Однако, иногда хочется полетать подальше, или иметь более надежное управление в условиях, когда есть много деревьев или зданий; вот тут-то и пригодится Crossfire.
Ещё одно преимущество Crossfire над другими системами — меньшая задержка сигнала, что по словам многих известных пилотов заметно улучшает управляемость. Мы говорим о разнице, измеряемой миллисекундами, так что можете заметить, а можете и не заметить её.
Модули и комплектующие для Crossfire:
Не знаете какой модуль выбрать? Вот их сравнение.
Антенны для радиомодулей
Приёмники
| Crossfire Micro RX | Crossfire Nano RX | Crossfire Diversity Nano RX |
 |
 |
 |
| Используются JST разъемы | Те же возможности, что и у Micro RX, но размер меньше! Подключение пайкой |
Двойная антенна, лучше приём |
| Amazon | GetFPV | GetFPV | Amazon | Amazon | RMRC | GetFPV |
Антенны для приёмников
Вот статья, в которой мы сравниваем две популярные дальнобойные системы Crossfire и Frsky R9M.
Обновление прошивки
Обновляем OpenTX
Чтобы избежать ненужных проблем и багов, установите свежую версию OpenTX. Вот инструкция для Тараниса.
Не забудьте скачать содержимое SD карты, т.к. там есть файлы, которые нам понадобятся для настройки передатчика и приемника Crossfire (например, LUA скрипты), подробнее описано в руководстве, ссылка чуть выше.
Обновляем прошивку TBS Crossfire
Чтобы обновить прошивку TBS Crossfire скачайте и установите TBS Agent http://www.team-blacksheep.com/corepro/agent
Запустите TBS Agent и подключите радиомодуль к компьютеру при помощи MicroUSB кабеля. Если есть более новая прошивка, то нажмите кнопку «Update», обновление займет всего несколько минут.

TBS Agent — обновление прошивки передающего радиомодуля
Каждый раз, когда вы обновляете прошивку в радиомодуле-передатчике нужно обновлять прошивку и в приёмниках. Это делается «по воздуху», без проводов. Ниже, в разделе про привязку мы расскажем подробнее.
Ставим радиомодуль Crossfire в Taranis
Радиомодуль просто вставляется в отсек позади пульта. Ставьте его аккуратно, не повредите контакты.

TBS Crossfire Micro Module установлен в Taranis X9D

Crossfire полностью совместим с Taranis X9D+ и Jumper T16. Работает с Taranis QX7 и Horus X10S, но есть небольшие недостатки, например, нельзя использовать макс. скорость передачи, что вызывает сообщение о потере телеметрии. К счастью, эти проблемы легко решаются самостоятельно.
Настраиваем Taranis для использования Crossfire
Создаем новую модель в передатчике. Проще всего сделать копию существующий и переименовать ее, например, в Crossfire. Если хотите создать модель с нуля — вот инструкция (англ).
Кратко нажимаем Menu, переходим на страницу Model Setup, перемещаемся вниз до «Internal RF» (внутренний модуль) и выбираем режим «OFF» (отключить).
Далее настраиваем параметр «External RF» (внешний модуль), ставим «CRSF» и меняем параметр Channel Range (диапазон каналов) на «CH1-16«.
После того, как вы это сделали и вышли из меню, модуль Crossfire должен включиться (на нём загорятся светодиоды).


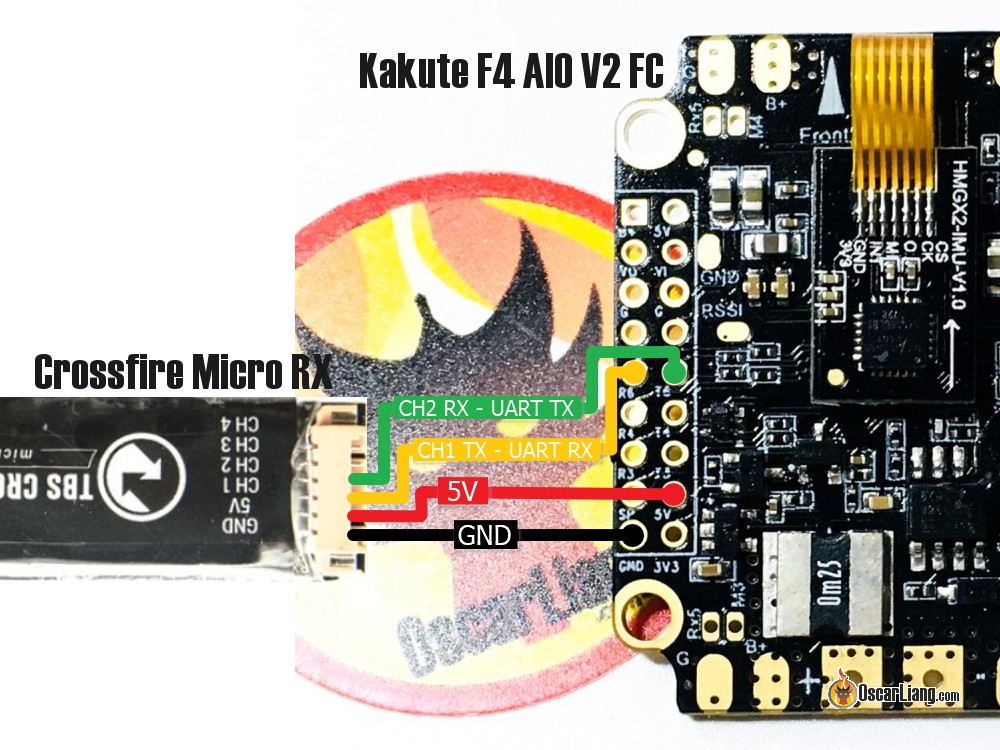
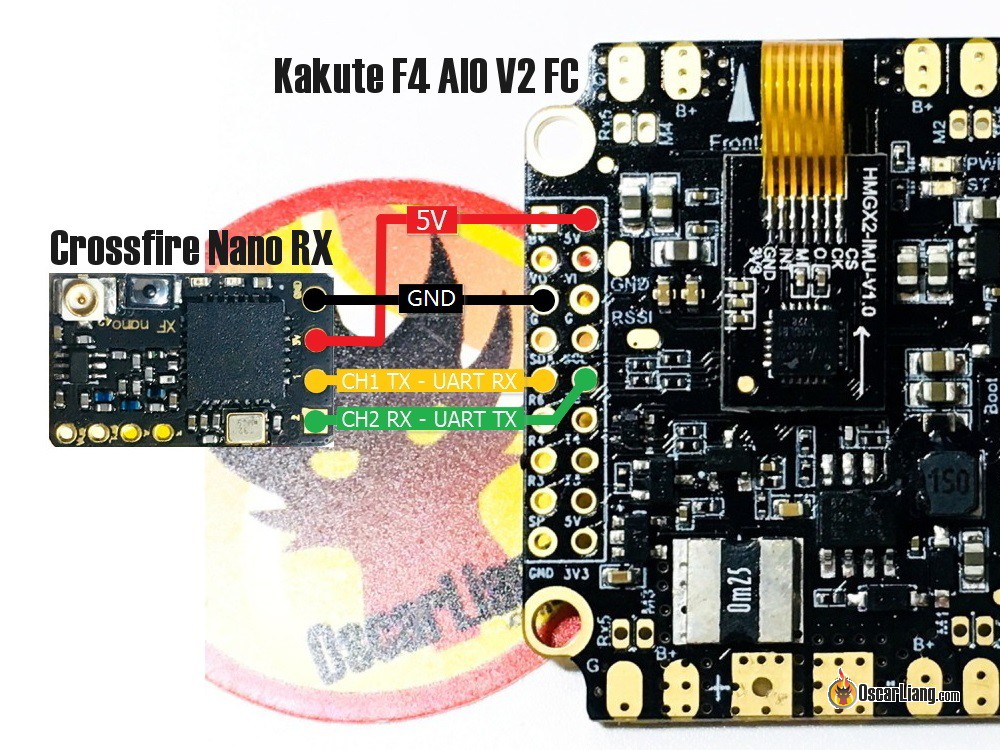
Подключаем приемник к полетному контроллеру
Помните, что практически все выходы в приёмнике можно программно переназначить. Это значит, что вы можете настроить их на любую функцию, поэтому есть куча способов подключения приёмника к полетному контроллеру.
Я покажу свой, можете сделать также:
- 5V к 5V
- GND к GND
- CH1 (Crossfire) к UART RX
- CH2 (Crossfire) к UART TX
На полетном контроллере можно использовать любой свободный последовательный порт (UART).
Можно подключить только CH1 и выбрать выход SBUS, но т.к. я хотел использовать протокол CRSF с телеметрией, то пришлось подключить оба провода.
Дополнительная информация: настраиваем SBUS у Crossfire (англ).
Замечу, что протокол CRSF имеет обычный, не инвертированный сигнал (как у SBUS и SmartPort), следовательно нельзя использовать выделенные для SBUS/SmartPort разъемы, т.к. там есть встроенный инвертор. Однако всё это не важно, если у вас ПК на F3 или F7, т.к. инверсия настраивается программно.
Программная эмуляция последовательного порта работает не очень быстро, поэтому её нельзя использовать с Crossfire.
В примере ниже я подключаю RX приёмника к UART6 полетника Kakute F4 AIO V2 FC.
Crossfire Micro Receiver:
Crossfire Nano Receiver:
Привязываем приёмник Crossfire к передатчику
Привязка приёмников Crossfire делается очень просто (в большинстве случаев), активировать режим привязки можно при помощи LUA скрипта. Такие скрипты поставляются с OpenTX начиная с версии 2.2., так что ничего не придется качать. 🙂

TBS Crossfire “Full” Module установлен в Horus X10
Пошаговая инструкция для привязки приемников Crossfire:
- Включаем приёмник, должен мигать зеленый светодиод, это значит, что он ждет начала процедуры привязки (если горит красный, тогда нажмите кнопку bind на приёмнике)
- Включаем передатчик и запускаем Crossfire LUA скрипт:
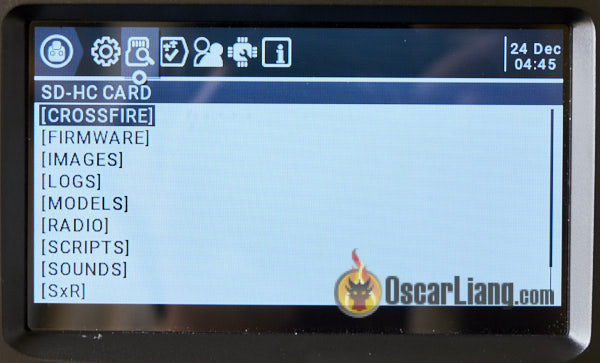
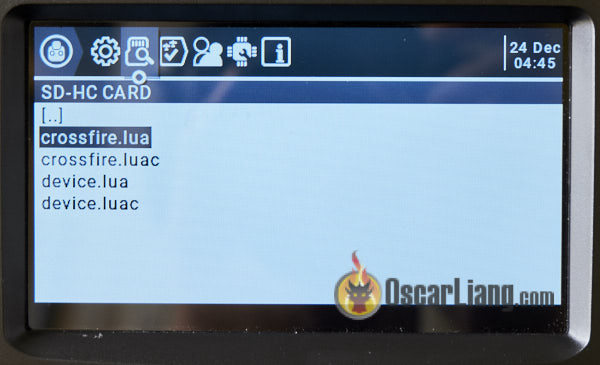
- Долгое нажатие на Menu, входим в Radio Setup (настройки передатчика). Нажимаем Page чтобы добраться до страницы «SD Card«
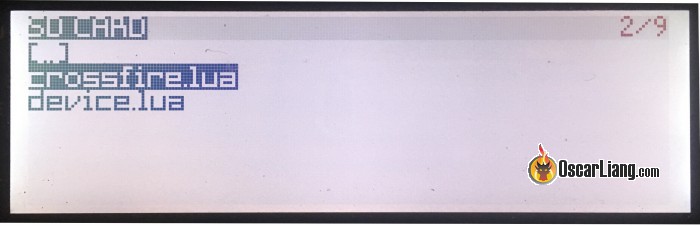
- Выбираем папку CROSSFIRE и долго жмем enter на файле crossfire.lua, в меню выбираем «execute» (выполнить)
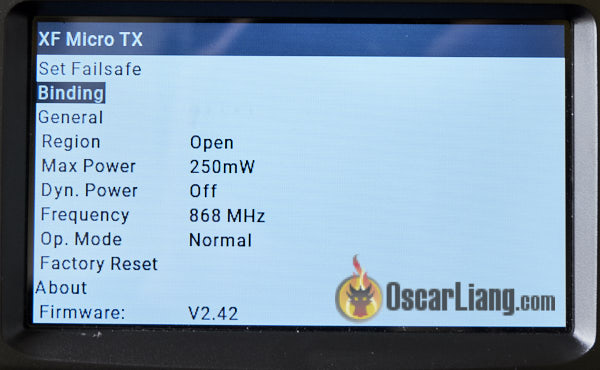
- На следующем экране выбираем XF Micro TX
- Далее выбираем Binding (как показано на картинке)

- Появится сообщение «Binding…», сам процесс привязки займет несколько секунд
- Если в приемнике слишком старая прошивка, тогда вам предложат её обновить, это займет несколько минут. После перепрошивки приемник будет быстро мигать зеленым (загрузка), затем зеленые светодиоды на приемнике и передатчике перестанут мигать и будут гореть постоянно.
- После привязки T16 автоматически переходит в обычный режим, а светодиод на приемнике перестает мигать и постоянно горит зеленым.
Выходим из меню, нажав Exit. Переходим к настройке приёмника.
Настраиваем приёмник в Таранисе
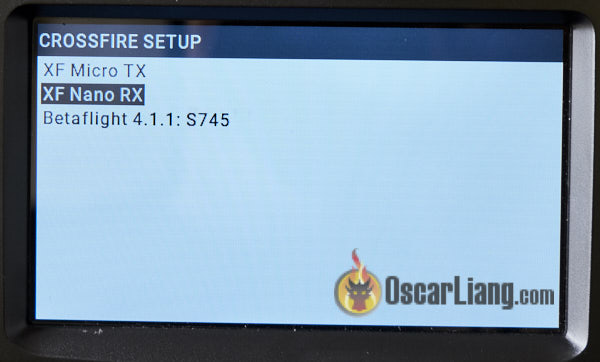
После привязки приёмника можно настраивать как передатчик, так и приёмник при помощи LUA скриптов. Если вы не видите пункта «XF Micro/Nano RX», это значит, что приёмник не привязан или выключен.

Первое что нужно сделать — это настроить выходы на приёмнике, чтобы он мог обмениваться данными с полетным контроллером.
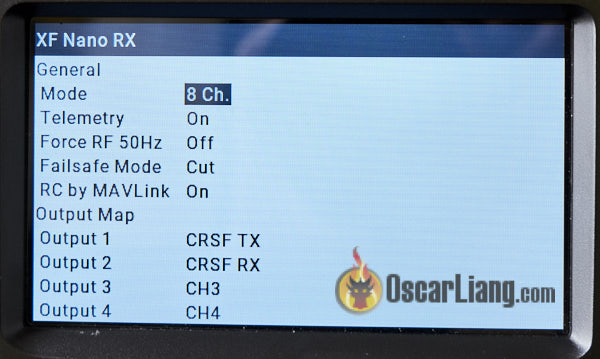
Чтобы это сделать, выбираем «XF Micro/Nano RX«, прокручиваем вниз до «Output Map» (карта выходов) и выбираем «Output 1» = «CRSF TX«, а для «Output 2» ставим «CRSF RX«. Всё! 🙂

Теперь настраиваем передающий радиомодуль.
Самое важное — убедиться, что выбран правильный частотный диапазон, в США это 915 МГц, а в Европе — 868 МГц. Если использовать не тот диапазон, то результат будет не очень надежным, а сигнал слабым и некачественным.
Для типичной конфигурации коптера в большинстве случаев будет достаточно 250 мВт выходной мощности. А автоматическое изменение мощности (Dyn. power) можно отключить.
Начиная с версии 2.4. максимальная выходная мощность Micro-модуля увеличена со 100 мВт до 250 мВт (англ).
Параметр Mode — задает число каналов, при использовании 8 каналов задержка при передаче сигнала будет меньше, чем при использовании 12 каналов. Убедитесь, что телеметрия включена, а failsafe в режиме Cut, т.е. моторы остановятся в случае пропадания сигнала, а коптер просто упадет, что минимизирует риски.
Настраиваем Betaflight для работы с Crossfire
Заключительный этап — настройка Betaflight.
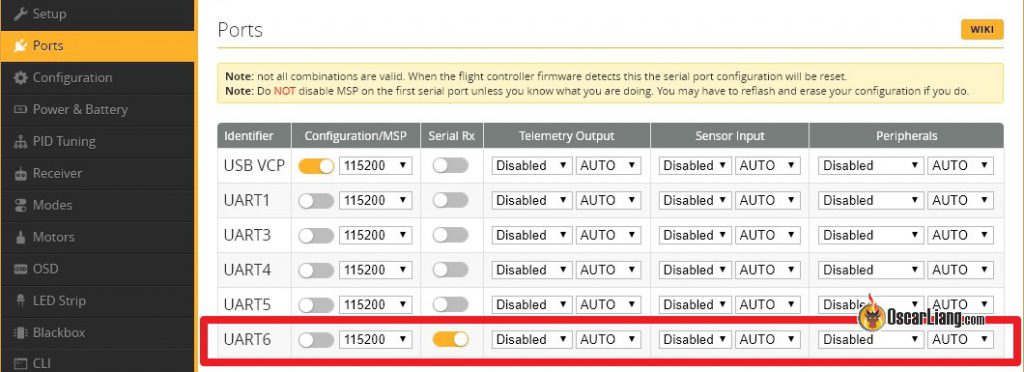
Переходим на вкладку Ports в Betaflight Configurator, включаем «Serial RX» на том порту, куда подключен Crossfire приемник. Нажимаем «Save«.
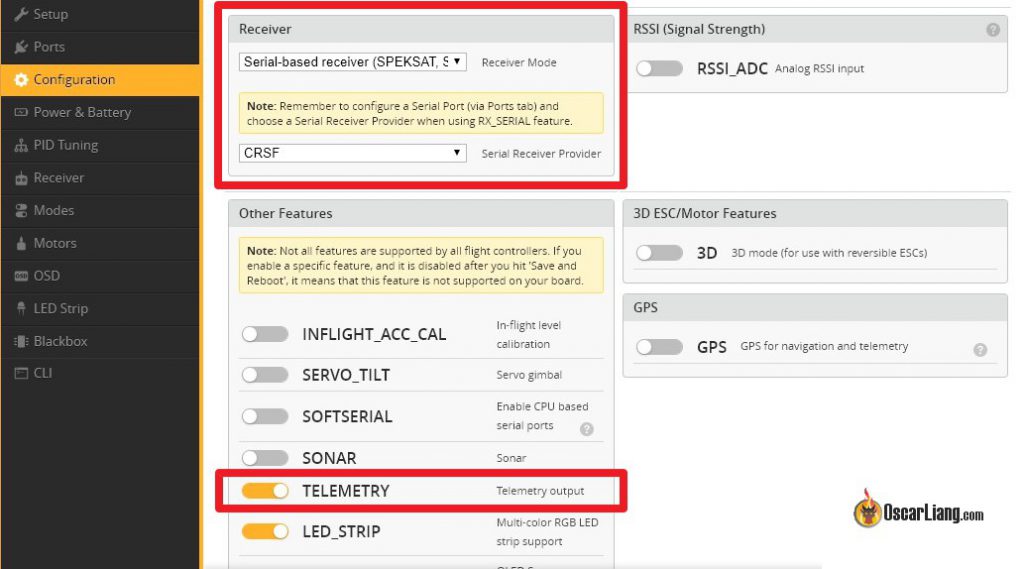
Открываем вкладку «Configuration«, в разделе «Receiver» выбираем «Serial-based receiver«, и затем, ниже, «CRSF«.
Не забудьте включить телеметрию (Telemetry) и нажать «Save«.
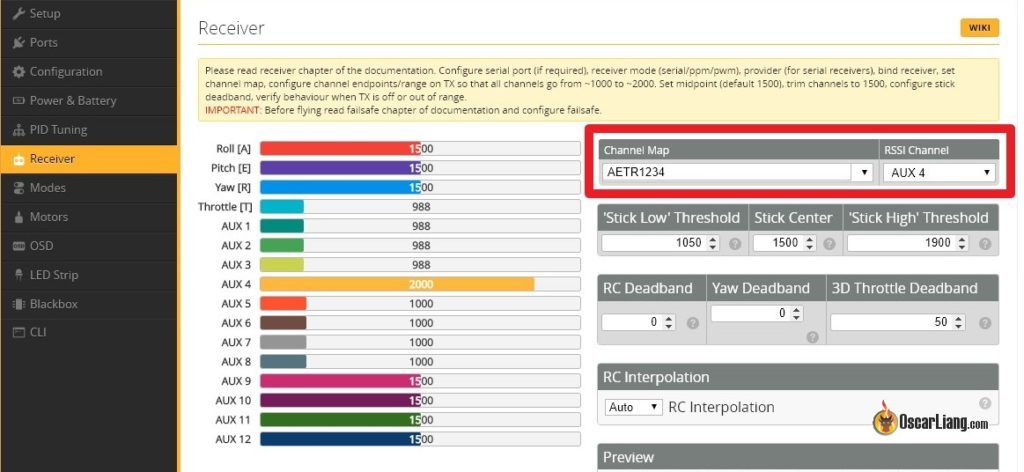
Последний шаг, переходим на вкладку «Receiver«, тут вы должны видеть реакцию на движения стиков. Это значит, что приёмник работает! Если реакции нет, тогда попробуйте проверить и поменять «Channel Map» (см выше).
Проверяем конечные точки (1000 и 2000), затем средние точки (1500), читаем тут про настройку.
Стики не двигаются? Возможно, включена инверсия сигнала. Попробуйте дать команду в консоли:
set serialrx_inverted = OFF
Если ничего не работает, возвращаемся к началу инструкции и проверяем провода, настройки Output Map, и параметры Betaflight.
На этом всё, Betaflight настроена для работы с Crossfire! 🙂
Чтобы убедиться в правильности работы телеметрии перейдите на страницу Telemetry в аппаратуре управления, затем выберите пункт «Discover new sensors», после этого должны появиться новые данные, включая VFAS — напряжение аккумулятора.
Устанавливаем антенну приемника
Если вы уже использовали другие системы радиоуправления, то вы удивитесь необычно крупной антенне и столкнетесь с проблемой — как её крепить? Вот статья (англ.) с описанием способов крепления антенн Crossfire.
Там несколько примеров с разными антенными: включая стоковый диполь и не убиваемую «Immortal T».

beeb
Чтобы добиться максимально возможного радиуса уверенного приема постарайтесь располагать антенну так, чтобы рама её не затеняла. Не сгибайте антенну и старайтесь правильно её ориентировать.
Антенну можно поставить практически в любое место на коптере, главное, чтобы её не повредили винты, все очень сильно зависит от рамы. Не забудьте поискать 3Д-печатный крепеж на Thingiverse.
Настраиваем LUA скрипты
На пульте можно запустить LUA скрипты для изменения кучи параметров Betaflight, например: PID, рейты, looptime, параметры фильтров, канал видеопередатчика и его выходную мощность!
Настройка практически такая же, как и для SmartPort, только не нужно менять настройки Betaflight, т.к. мы это уже сделали (например, включили телеметрию). Единственная вещь, которую нужно сделать — загрузить LUA скрипты в Таранис!
Настраиваем LQ и RSSI в OSD и в предупреждениях Тараниса
Вот руководство, в котором объясняется что такое LQ и RSSI, и как их отобразить на экране (англ).
FAQ
Несколько наиболее популярных вопросов.
Сколько человек может одновременно летать, используя Crossfire?
Согласно данным от TBS — одновременно может летать до 50 человек. В тесте летало 12 человек, связь была заметно хуже, но все равно можно было летать, так что TBS не рекомендует превышать это значение 🙂
История изменений
- Март 2018 — первая версия статьи
- Январь 2019 — обновлены ссылки и настройка
- Декабрь 2019 — добавлены скриншоты для Jumper T16

 — американский лидер в производстве разнообразной высококачественной FPV продукции
— американский лидер в производстве разнообразной высококачественной FPV продукции
TBS в среде FPV-шников давно имеет репутацию фирмы, которая выпускает ЛУЧШЕЕ на FPV рынке. Их продукты ждут, на их продукты равняются и их продукты всегда имеют репутацию стильных, ультимативных и инновационных новинок. TBS не делает дешевые вещи, TBS делает офигенные и крутые FPV девайсы, которые тут же становятся популярными. Не удивительно, что их последняя LRS следует тому же курсу.
В то время, как большинство выпускает LRS системы на частоте 433Mhz, TBS рвет шаблоны и выпускает LRS на частоте 915Mhz на RF чипах последнего поколения с умопомрачительной чувствительностью. Кроме дальности, которая уже в тестах зашкаливает за 100км(!!!) TBS решили не останавливаться и сделать действительно очень крутой продукт с кучей инноваций.
Особенности:
- Встроенный HD OLED экран для настроек и демонстрации режимов. Теперь не обязательно подключать LRS к компьютеру. Все настройки, включая бинд, мощность можно настроить тут же, «не отходя от кассы». Теперь это просто и быстро.
- Частоты 868/915Mhz и хорошая чувствительность -130dB позволяют летать на умопомрачительные расстояния особенно там, где эфир зашумлен довольно популярными частотами 433Mhz
- Настраеваемая мощность от 10mW до 2W
- Очень низкие задержки.
- Фулл-дуплекс линк с поддержкой телеметрии — примник общается с передатчиком и сообщает ему полетные данные!
- Поддержка блутус для передачи телеметрии на телефон
- Встроенный маяк с поддержкой GPS
- TX можно вставлять в слот JR или использоваться отдельно (по желанию)
- Поддержка хэдтрекера
- EXT порт для дальнейшего наращивания функционала
- Стильный дизайн
Спецификации:
- Частоты: 868MHz/915MHz
- Вольтаж: 3.5 — 13V
- Потребляемая мощность: 1.1W (@10mW) — 3.2W (@2000mW)
- Размеры: 55x89x15мм
- Вес: 76гр
Комплектация:
- TBS Crossfire передатчик — 1шт.
- JR адаптер — 1шт.
- Настроенная антенна — 1шт.
- Futaba кабель — 1шт.
- Graupner кабель — 1шт.
- PWM Pigtail — 1шт.
- Переходник JST-XT30 — 1шт.
Инструкция: http://www.team-blacksheep.com/tbs-crossfire-manual.pdf
Программное обеспечение для обновления: http://www.team-blacksheep.com/corepro/agent
 Функции LQ и RSSI могут запутать и ввести в заблуждение пилотов, у которых есть TBS Crossfire.
Функции LQ и RSSI могут запутать и ввести в заблуждение пилотов, у которых есть TBS Crossfire.
TBS Crossfire — это усилитель сигнала.
LQ — это уровень шума в диапазоне принимаемого сигнала.
RSSI — это уровень (сила) сигнала.
Оригинал статьи: https://oscarliang.com
В этой статье я рассмотрю и попытаюсь объяснить различия между LQ и RSSI в TBS Crossfire, а также как это все настроить в Betaflight и OpenTX на пульте Taranis для контроля и качества сигнала.
RSSI и LQ очень полезны для мониторинга качества и уровня сигнала во время полетов.
Содержание
- Чем отличается LQ от RSSI
- Что такое LQ
- Почему нужно использовать LQ для контроля качества сигнала
- Как включить и настроить LQ в Taranis OpenTX
- Назначение каналов для вывода LQ
- Как включить LQ в OSD
- Настройка сигнализации при низком LQ в Taranis
- Идеальный LQ и худший LQ
RSSI — это индикатор уровня принимаемого сигнала, измеряет мощность радиосигнала.
Помимо индикатора RSSI, усилители Crossfire могут выводить и данные LQ. LQ выводит данные о качестве сигнала, а точнее, о шуме. Эти данные основываются на проценте полученного сигнала, т.е. часть сигнала теряется (это и есть шум), а большая часть доходит, именно это и отображает (сколько дошло) LQ.
В Crossfire можно вывести и комбинированные данные, RSSI/LQ. В таком режиме будет отображаться самое низкое (худшее) значение между ними двумя. Это удобно использовать, когда OSD использует только один канал связи.
Что такое LQ
Значение уже расшифровывалось выше, но здесь поговорим о другом. Crossfire LQ отображает значение в диапазоне от 0% до 300, а не до 100% как все привыкли. Это связано с тем, что Crossfire увеличивает каналы передачи данных.
Стандартные пульты управления работают на частоте 50Гц в секунду, это означает, что они могут посылать 50 команд в секунду. TBS Crossfire может же работать на 150Гц, т.е. 150 команд в секунду и у нас получается, что 50 команд это 100%, а 150 команд — это 300%.
Почему нужно использовать LQ для контроля качества сигнала
При полетах на дальние расстояния, да и не только, нужно знать не только уровень сигнала через RSSI, но и его качество. Большой уровень шума может «испортить» сигнал, несмотря на отличный уровень сигнала, его мощность. Уровень шума зависит от многих факторов, таких как препятствия, помехи от компонентов самого квадрокоптера, линии электропередач и так далее.
Рекомендация: используйте LQ вместо RSSI и SNR (комбинированный показатель LQ\RSSI) в качестве основного показателя уровня и качества сигнала.
Во время тестирования, я понял, что в некоторых ситуациях у меня плохой сигнал RSSI, но LQ показывает отличный уровень. Поэтому, сейчас для меня LQ более надежный показатель, чем RSSI. Можно использовать и комбинированный показатель этих двух функций.
Как включить и настроить LQ в Taranis OpenTX
Назначение каналов для вывода LQ
Прокрутите вниз до «Channel Map» и выберите свободный Dst. канал, после чего поменяйте его на LQ, например, канал 8:
Как включить LQ в OSD
Функцию можно включить для отображения в Betaflight OSD.
Откройте Betaflight, перейдите во вкладку Receiver, выберите канал Aux, который будете использовать для LQ. Для Ch8 вы должны выбрать «AUX 4«. (Минус каналы throttle, yaw, pitch и roll).
Также, во вкладке OSD нужно включить RSSI для отображения на экране.
Настройка сигнализации при низком LQ в Taranis
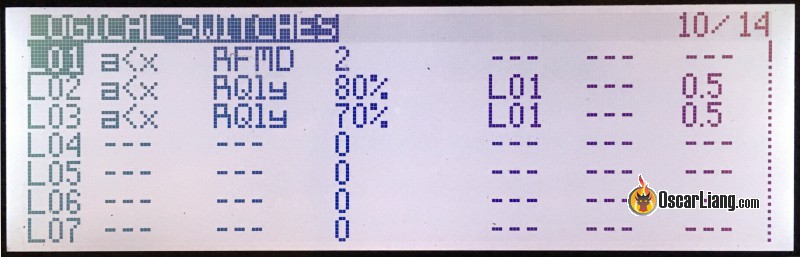
LQ в Crossfire может выводить более широкий диапазон, чем OpenTX и отображает значения в диапазоне (0-300%), как говорилось выше. Поэтому он разделен на 2 отдельных значения в OpenTX (датчики на вкладке телеметрии): RLQY и RFMD.
RLQY означает качество полученного сигнала. Это количество переданного сигнала, полученного приемником в процентах (от 0% до 100%).
RFMD означает Режим Рабочей Частоты, и есть 3 режима радиочастоты:
- RFMD = 2, режим 150 Гц,
- Режим RFMD = 1, 50 Гц
- Если RFMD = 0, режим 4 Гц (без телеметрии)
RFMD 2 — режим с низкой задержкой для полетов малой дальности, и он обеспечивает самую быструю скорость обновления 150 Гц. Crossfire переходит в RFMD 1, когда вы летите на большое расстояние. Если сигнал становится очень слабым, он перейдет в RFMD 0 и снизит скорость обновления до 4 Гц без телеметрии.
LQ может отключиться на секунду при переходе на другой режим.
Сигнализация срабатывает по такому принципу (логические переключатели — Logical Switches:
- L01 — это начальное предупреждение срабатывает, когда вы находитесь в RFMD 1 или 0
- L02 — это предупреждающий сигнал. Он включается, если L01 уже активен, а LQ ниже 80%. Если это происходит в течение пол-секунды, то это просто побочный эффект от переключения режимов.
- L03 — Это критический предупреждающий сигнал. Он включается, если L01 активен, а LQ ниже 70%. Существует также 0,5-секундная задержка по той же причине, что и у L02.
Функции, которые подают звуковые сигналы:
- SF1 — воспроизводит звук «Warn1», когда активен L02 (80% LQ)
- SF2 — воспроизводит звук «Siren», когда активен L03 (70% LQ)
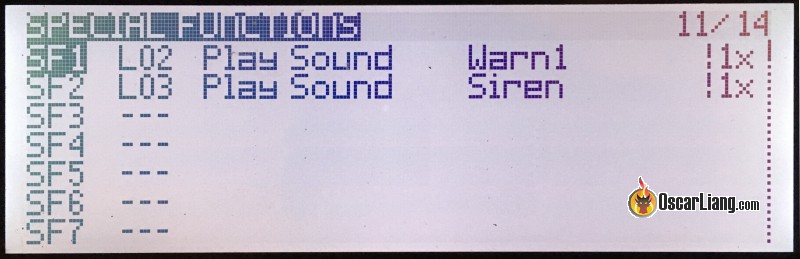
!1x в конце функции означает, что он не будет воспроизводиться, когда вы включаете аппаратуру, и он срабатывает только один раз.
Идеальный LQ и худший LQ
Когда вы находитесь в режиме RFMD 2 (150 Гц), максимальный LQ будет составлять 300%. Но в действительности, процент LQ в этом режиме не имеет значения, и вы можете его игнорировать. Поскольку система переключится на RFMD 1 (50 Гц), если это нужно для текущего качества связи.
Вы должны начать обращать внимание на LQ в RFMD 1. Если качество сигнала продолжает ухудшаться, оно изменится на очень медленный RFMD 0, который даст только 4 Гц скорости обновления.
Вероятно, этого не хватит для акро режима, но хватит, чтобы сработала система «домой» и дрон вернется в заданное месторасположение.
Хорошая связь для дальнолетов (RFMD 1) должна оставаться выше 90%. LQ 70% ниже считается плохим показателем, если вы видите это, вы должны вернуться назад как можно скорее! Если у вас постоянно низкое значение, проверьте антенны, возможно на них есть повреждения.
Обновление

Привет бро! Давай покажу как обновить приемник и передатчик TBS Crossfire, а после забиндим их через приложение TBS Agent.
Для начала надо скачать TBS Agent на сайте Team BlackSheep. Перейди по ссылки и пролистай страницу до раздела DOWNLOAD, выбери свою ОС, скачай и установи агент. При первом запуске агент попросит тебя авторизоваться, создай учетку и авторизируйся.
Обновление передатчика
Обновление приемника
А что если не получилось?
Если делать это через TBS Agent то должно получиться с 99% вероятностью. Но возможно что обновление повисло, аккум умер или что то еще и биндинг не происходит, а приемник моргает красным сразу после включения.
Для этого зажми кнопку на приемнике и подключи бату к кваду при этом держа кнопку на приемники. После того как квад включится отпусти кнопку и снова нажми и держи ее 4 секунды. Приемник начнет быстро мигать зеленым цветом. Нажми на кнопку BIND в TBS Agent и жди поиска и обновления приемника.
На этом все, удачного апгрейда и бинда, увидимся!

Новые посты в моем Телеграмм канале
— швейцарский лидер в производстве разнообразной высококачественной FPV продукции
TBS в среде FPV-шников давно имеет репутацию фирмы, которая выпускает ЛУЧШЕЕ на FPV рынке. Их продукты ждут, на их продукты равняются и их продукты всегда имеют репутацию стильных, ультимативных и инновационных новинок. TBS не делает дешевые вещи, TBS делает офигенные и крутые FPV девайсы, которые тут же становятся популярными. Не удивительно, что их последняя LRS следует тому же курсу.
В то время, как большинство выпускает LRS системы на частоте 433Mhz, TBS рвет шаблоны и выпускает LRS на частоте 915Mhz на RF чипах последнего поколения с умопомрачительной чувствительностью. Кроме дальности, которая уже в тестах зашкаливает за 100км(!!!) TBS решили не останавливаться и сделать действительно очень крутой продукт с кучей инноваций.
Особенности:
Встроенный HD OLED экран для настроек и демонстрации режимов. Теперь не обязательно подключать LRS к компьютеру. Все настройки, включая бинд, мощность можно настроить тут же, «не отходя от кассы» — просто и быстро.
Частоты 868/915Mhz и хорошая чувствительность -130dB позволяют летать на умопомрачительные расстояния особенно там, где эфир зашумлен довольно популярными частотами 433Mhz
Настраиваемая мощность от 10mW до 2W
Очень низкие задержки
Фулл-дуплекс линк с поддержкой телеметрии — приемник общается с передатчиком и сообщает ему полетные данные!
Поддержка блутус для передачи телеметрии на телефон
Встроенный маяк с поддержкой GPS
TX можно вставлять в слот JR или использоваться отдельно (по желанию)
Поддержка хэдтрекера
EXT порт для дальнейшего наращивания функционала
Стильный дизайн
Спецификации:
Частоты: 868MHz/915MHz
Вольтаж: 3.5 — 13V
Потребляемая мощность: 1.1W (@10mW) — 3.2W (@2000mW)
Размеры: 55x89x15мм
Вес: 76гр
Комплектация:
TBS Crossfire передатчик — 1шт.
JR адаптер — 1шт.
Настроенная антенна — 1шт.
Futaba кабель — 1шт.
Graupner кабель — 1шт.
PWM Pigtail — 1шт.
Переходник JST-XT30 — 1шт.
Инструкция: http://www.team-blacksheep.com/tbs-crossfire-manual.pdf
Программное обеспечение для обновления: http://www.team-blacksheep.com/corepro/agent
В этом руководстве показано как настроить TBS Crossfire для работы с Taranis X9D Plus и Jumper T16. Я покажу вам как подключить приемник к полетному контроллеру и как настроить Betaflight. Аналогично можно настроить и другие передатчики с прошивкой OpenTX.
Оригинал: TBS Crossfire Setup For Taranis & T16 (Betaflight)
Дополнительная информация: как выбрать хорошую аппаратуру управления?
Содержание
- Что особенного в Crossfire?
- Обновление прошивки
- Ставим радиомодуль Crossfire в Taranis
- Настраиваем Taranis для использования Crossfire
- Подключаем приёмник к полетному контроллеру
- Привязываем приёмник Crossfire к передатчику
- Настраиваем приемник в Таранисе
- Настраиваем Betaflight для работы с Crossfire
- Устанавливаем антенну приемника
- Настраиваем LUA скрипты
TBS Crossfire — это популярная система радиоуправления для полетов на дальние расстояния.
Одна из составных частей — внешний радиомодуль, который устанавливается в отсек аппаратуры управления типа Taranis или Nirvana (англ), так что вы сможете использовать весь функционал OpenTX.
Crossfire работает на частоте 900 МГц, более низкая частота означает, что сигнал лучше проходит через препятствия. По сравнению с традиционными системами, работающими на частоте 2,4 ГГц, это дает больший радиус работы и более надежный прием сигнала. Однако есть и недостаток — более длинные и крупные антенны.
Frsky Taranis с двухантенными приемниками (R-XSR и X4R-SB) теоретически дает до 1,5 км, чего более чем достаточно для большинства пилотов мини-коптеров. Однако, иногда хочется полетать подальше, или иметь более надежное управление в условиях, когда есть много деревьев или зданий; вот тут-то и пригодится Crossfire.
Ещё одно преимущество Crossfire над другими системами — меньшая задержка сигнала, что по словам многих известных пилотов заметно улучшает управляемость. Мы говорим о разнице, измеряемой миллисекундами, так что можете заметить, а можете и не заметить её.
Модули и комплектующие для Crossfire:
Не знаете какой модуль выбрать? Вот их сравнение.
Антенны для радиомодулей
Приёмники
| Crossfire Micro RX | Crossfire Nano RX | Crossfire Diversity Nano RX |
|
|
|
| Используются JST разъемы | Те же возможности, что и у Micro RX, но размер меньше! Подключение пайкой |
Двойная антенна, лучше приём |
| Amazon | GetFPV | GetFPV | Amazon | Amazon | RMRC | GetFPV |
Антенны для приёмников
Вот статья, в которой мы сравниваем две популярные дальнобойные системы Crossfire и Frsky R9M.
Обновление прошивки
Обновляем OpenTX
Чтобы избежать ненужных проблем и багов, установите свежую версию OpenTX. Вот инструкция для Тараниса.
Не забудьте скачать содержимое SD карты, т.к. там есть файлы, которые нам понадобятся для настройки передатчика и приемника Crossfire (например, LUA скрипты), подробнее описано в руководстве, ссылка чуть выше.
Обновляем прошивку TBS Crossfire
Чтобы обновить прошивку TBS Crossfire скачайте и установите TBS Agent http://www.team-blacksheep.com/corepro/agent
Запустите TBS Agent и подключите радиомодуль к компьютеру при помощи MicroUSB кабеля. Если есть более новая прошивка, то нажмите кнопку «Update», обновление займет всего несколько минут.
TBS Agent — обновление прошивки передающего радиомодуля
Каждый раз, когда вы обновляете прошивку в радиомодуле-передатчике нужно обновлять прошивку и в приёмниках. Это делается «по воздуху», без проводов. Ниже, в разделе про привязку мы расскажем подробнее.
Ставим радиомодуль Crossfire в Taranis
Радиомодуль просто вставляется в отсек позади пульта. Ставьте его аккуратно, не повредите контакты.
TBS Crossfire Micro Module установлен в Taranis X9D
Crossfire полностью совместим с Taranis X9D+ и Jumper T16. Работает с Taranis QX7 и Horus X10S, но есть небольшие недостатки, например, нельзя использовать макс. скорость передачи, что вызывает сообщение о потере телеметрии. К счастью, эти проблемы легко решаются самостоятельно.
Настраиваем Taranis для использования Crossfire
Создаем новую модель в передатчике. Проще всего сделать копию существующий и переименовать ее, например, в Crossfire. Если хотите создать модель с нуля — вот инструкция (англ).
Кратко нажимаем Menu, переходим на страницу Model Setup, перемещаемся вниз до «Internal RF» (внутренний модуль) и выбираем режим «OFF» (отключить).
Далее настраиваем параметр «External RF» (внешний модуль), ставим «CRSF» и меняем параметр Channel Range (диапазон каналов) на «CH1-16«.
После того, как вы это сделали и вышли из меню, модуль Crossfire должен включиться (на нём загорятся светодиоды).
Подключаем приемник к полетному контроллеру
Помните, что практически все выходы в приёмнике можно программно переназначить. Это значит, что вы можете настроить их на любую функцию, поэтому есть куча способов подключения приёмника к полетному контроллеру.
Я покажу свой, можете сделать также:
- 5V к 5V
- GND к GND
- CH1 (Crossfire) к UART RX
- CH2 (Crossfire) к UART TX
На полетном контроллере можно использовать любой свободный последовательный порт (UART).
Можно подключить только CH1 и выбрать выход SBUS, но т.к. я хотел использовать протокол CRSF с телеметрией, то пришлось подключить оба провода.
Дополнительная информация: настраиваем SBUS у Crossfire (англ).
Замечу, что протокол CRSF имеет обычный, не инвертированный сигнал (как у SBUS и SmartPort), следовательно нельзя использовать выделенные для SBUS/SmartPort разъемы, т.к. там есть встроенный инвертор. Однако всё это не важно, если у вас ПК на F3 или F7, т.к. инверсия настраивается программно.
Программная эмуляция последовательного порта работает не очень быстро, поэтому её нельзя использовать с Crossfire.
В примере ниже я подключаю RX приёмника к UART6 полетника Kakute F4 AIO V2 FC.
Crossfire Micro Receiver:
Crossfire Nano Receiver:
Привязка приёмников Crossfire делается очень просто (в большинстве случаев), активировать режим привязки можно при помощи LUA скрипта. Такие скрипты поставляются с OpenTX начиная с версии 2.2., так что ничего не придется качать. 🙂
TBS Crossfire “Full” Module установлен в Horus X10
Пошаговая инструкция для привязки приемников Crossfire:
- Включаем приёмник, должен мигать зеленый светодиод, это значит, что он ждет начала процедуры привязки (если горит красный, тогда нажмите кнопку bind на приёмнике)
- Включаем передатчик и запускаем Crossfire LUA скрипт:
- Долгое нажатие на Menu, входим в Radio Setup (настройки передатчика). Нажимаем Page чтобы добраться до страницы «SD Card«
- Выбираем папку CROSSFIRE и долго жмем enter на файле crossfire.lua, в меню выбираем «execute» (выполнить)
- На следующем экране выбираем XF Micro TX
- Далее выбираем Binding (как показано на картинке)
- Появится сообщение «Binding…», сам процесс привязки займет несколько секунд
- Если в приемнике слишком старая прошивка, тогда вам предложат её обновить, это займет несколько минут. После перепрошивки приемник будет быстро мигать зеленым (загрузка), затем зеленые светодиоды на приемнике и передатчике перестанут мигать и будут гореть постоянно.
- После привязки T16 автоматически переходит в обычный режим, а светодиод на приемнике перестает мигать и постоянно горит зеленым.
Выходим из меню, нажав Exit. Переходим к настройке приёмника.
Настраиваем приёмник в Таранисе
После привязки приёмника можно настраивать как передатчик, так и приёмник при помощи LUA скриптов. Если вы не видите пункта «XF Micro/Nano RX», это значит, что приёмник не привязан или выключен.
Первое что нужно сделать — это настроить выходы на приёмнике, чтобы он мог обмениваться данными с полетным контроллером.
Чтобы это сделать, выбираем «XF Micro/Nano RX«, прокручиваем вниз до «Output Map» (карта выходов) и выбираем «Output 1» = «CRSF TX«, а для «Output 2» ставим «CRSF RX«. Всё! 🙂
Теперь настраиваем передающий радиомодуль.
Самое важное — убедиться, что выбран правильный частотный диапазон, в США это 915 МГц, а в Европе — 868 МГц. Если использовать не тот диапазон, то результат будет не очень надежным, а сигнал слабым и некачественным.
Для типичной конфигурации коптера в большинстве случаев будет достаточно 250 мВт выходной мощности. А автоматическое изменение мощности (Dyn. power) можно отключить.
Начиная с версии 2.4. максимальная выходная мощность Micro-модуля увеличена со 100 мВт до 250 мВт (англ).
Параметр Mode — задает число каналов, при использовании 8 каналов задержка при передаче сигнала будет меньше, чем при использовании 12 каналов. Убедитесь, что телеметрия включена, а failsafe в режиме Cut, т.е. моторы остановятся в случае пропадания сигнала, а коптер просто упадет, что минимизирует риски.
Настраиваем Betaflight для работы с Crossfire
Заключительный этап — настройка Betaflight.
Переходим на вкладку Ports в Betaflight Configurator, включаем «Serial RX» на том порту, куда подключен Crossfire приемник. Нажимаем «Save«.
Открываем вкладку «Configuration«, в разделе «Receiver» выбираем «Serial-based receiver«, и затем, ниже, «CRSF«.
Не забудьте включить телеметрию (Telemetry) и нажать «Save«.
Последний шаг, переходим на вкладку «Receiver«, тут вы должны видеть реакцию на движения стиков. Это значит, что приёмник работает! Если реакции нет, тогда попробуйте проверить и поменять «Channel Map» (см выше).
Проверяем конечные точки (1000 и 2000), затем средние точки (1500), читаем тут про настройку.
Стики не двигаются? Возможно, включена инверсия сигнала. Попробуйте дать команду в консоли:
set serialrx_inverted = OFF
Если ничего не работает, возвращаемся к началу инструкции и проверяем провода, настройки Output Map, и параметры Betaflight.
На этом всё, Betaflight настроена для работы с Crossfire! 🙂
Чтобы убедиться в правильности работы телеметрии перейдите на страницу Telemetry в аппаратуре управления, затем выберите пункт «Discover new sensors», после этого должны появиться новые данные, включая VFAS — напряжение аккумулятора.
Устанавливаем антенну приемника
Если вы уже использовали другие системы радиоуправления, то вы удивитесь необычно крупной антенне и столкнетесь с проблемой — как её крепить? Вот статья (англ.) с описанием способов крепления антенн Crossfire.
Там несколько примеров с разными антенными: включая стоковый диполь и не убиваемую «Immortal T».
beeb
Чтобы добиться максимально возможного радиуса уверенного приема постарайтесь располагать антенну так, чтобы рама её не затеняла. Не сгибайте антенну и старайтесь правильно её ориентировать.
Антенну можно поставить практически в любое место на коптере, главное, чтобы её не повредили винты, все очень сильно зависит от рамы. Не забудьте поискать 3Д-печатный крепеж на Thingiverse.
Настраиваем LUA скрипты
На пульте можно запустить LUA скрипты для изменения кучи параметров Betaflight, например: PID, рейты, looptime, параметры фильтров, канал видеопередатчика и его выходную мощность!
Настройка практически такая же, как и для SmartPort, только не нужно менять настройки Betaflight, т.к. мы это уже сделали (например, включили телеметрию). Единственная вещь, которую нужно сделать — загрузить LUA скрипты в Таранис!
Настраиваем LQ и RSSI в OSD и в предупреждениях Тараниса
Вот руководство, в котором объясняется что такое LQ и RSSI, и как их отобразить на экране (англ).
FAQ
Несколько наиболее популярных вопросов.
Сколько человек может одновременно летать, используя Crossfire?
Согласно данным от TBS — одновременно может летать до 50 человек. В тесте летало 12 человек, связь была заметно хуже, но все равно можно было летать, так что TBS не рекомендует превышать это значение 🙂
История изменений
- Март 2018 — первая версия статьи
- Январь 2019 — обновлены ссылки и настройка
- Декабрь 2019 — добавлены скриншоты для Jumper T16
Содержание
- Что особенного в crossfire?
- Почему fport лучше?
- «делим» один uart между smartaudio и телеметрией регуляторов
- Frsky telemetry — rssi и напряжение аккумулятора
- Антенны для приёмников
- История изменений
- Как настроить fport?
- Как настроить sbus / smartport на пк naze32 rev5 (f1)
- Как настроить и использовать soft serial?
- Как соединить smartport и naze32
- Напряжение аккумулятора
- Настраиваем betaflight для работы с crossfire
- Настраиваем lq и rssi в osd и в предупреждениях тараниса
- Настраиваем lua скрипты
- Настраиваем sbus и smartport на пк f4
- Настраиваем taranis для использования crossfire
- Настраиваем голосовые предупреждения
- Настраиваем приёмник в таранисе
- Настройка экранов телеметрии в taranis
- Настройка через betaflight/cleanflight configurator
- Недостаточно последовательных портов? давайте использовать led_strip для smartport
- Обновляем opentx
- Ограничения, связанные с использованием softserial
- Подключение телеметрии
- Полетные контроллеры
- Привязываем приёмник crossfire к передатчику
- Примеры использования softserial
- Решение проблем с fport
- Сколько человек может одновременно летать, используя crossfire?
- Ставим радиомодуль crossfire в taranis
- Устанавливаем антенну приемника
- Хакнутый, «неинвертированный» сигнал smartport (f4)
Что особенного в crossfire?
TBS Crossfire — это популярная система радиоуправления для полетов на дальние расстояния.
Одна из составных частей — внешний радиомодуль, который устанавливается в отсек аппаратуры управления типа Taranis или Nirvana (англ), так что вы сможете использовать весь функционал OpenTX.
Crossfire работает на частоте 900 МГц, более низкая частота означает, что сигнал лучше проходит через препятствия. По сравнению с традиционными системами, работающими на частоте 2,4 ГГц, это дает больший радиус работы и более надежный прием сигнала. Однако есть и недостаток — более длинные и крупные антенны.
Frsky Taranis с двухантенными приемниками (R-XSR и X4R-SB) теоретически дает до 1,5 км, чего более чем достаточно для большинства пилотов мини-коптеров. Однако, иногда хочется полетать подальше, или иметь более надежное управление в условиях, когда есть много деревьев или зданий; вот тут-то и пригодится Crossfire.
Ещё одно преимущество Crossfire над другими системами — меньшая задержка сигнала, что по словам многих известных пилотов заметно улучшает управляемость. Мы говорим о разнице, измеряемой миллисекундами, так что можете заметить, а можете и не заметить её.
Модули и комплектующие для Crossfire:
Не знаете какой модуль выбрать? Вот их сравнение.
Почему fport лучше?
Причины, по которым я предпочитаю использовать FPort, а не SBUS и SmartPort:
- FPort передает управляющий сигнал, телеметрию и RSSI по одному проводу.
- упрощается прокладка проводов и пайка
- экономится последовательный порт
- FPort — имеет неинвертированный сигнал, в общем, надеюсь, больше не понадобятся всякие трюки и хаки с инверсией сигнала на ПК с F4.
- FPort немного быстрее, чем SBUS (англ.)
- RSSI работает, не занимая отдельный канал управления
«делим» один uart между smartaudio и телеметрией регуляторов
Использование контактов TX и RX одного порта для двух устройств позволяет освободить целый порт для чего-нибудь другого.
Например, вы можете повесить телеметрию регулей на RX UART1 и настроить TX UART1 как SoftSerial для работы SmartAudio.
В консоли набираем «resource» и находим контакт для TX1, в нашем случае это A09.
Назначаем A09 на SoftSerial 1
resource SERIAL_TX 11 A09 save
Включаем фичу «SoftSerial» в Betaflight, теперь вы должны увидеть SoftSerial1 на закладке Ports. Выбираем «ESC» для UART1 и SmartAudio для SoftSerial1.
Возможно потребуется перезагрузить ПК, выдернув USB кабель и аккумулятор, и затем подключить все обратно.
Телеметрия от FrSky имеет впечатляющий список возможностей и способна передавать разные типы данных о полете. Например, мы покажем вам, как настроить прием RSSI (англ, Signal strength indication — уровень принимаемого сигнала), напряжение аккумулятора и как отобразить эти данные на экране передатчика.
Кто-то может задать вопрос: «зачем использовать телеметрию, когда можно подключить пищалку-сирену и OSD?» Ок, сирену бывает сложно услышать на расстоянии. OSD — очень полезная штука, но не помешает еще один механизм для увеличения надежности и безопасности.
Необходимые шаги для настройки телеметрии в D4R-II:
- Подключить пин RX от телеметрии к полетному контроллеру
- Настроить ПК в приложении Betaflight/Cleanflight (запускается через Chrome)
- Настроить Taranis на получение телеметрии
Если хотите, можно модифицировать Таранис и поменять звуки.
Антенны для приёмников
Вот статья, в которой мы сравниваем две популярные дальнобойные системы Crossfire и Frsky R9M.
История изменений
- Декабрь 2023 — первая версия статьи для F1 Naze32 Rev5
- Апрель 2023 — обновлены инструкции для F3
- Июль 2023 — Обновлены ссылки, настройка SmartPort на F4 без инвертора
Как настроить fport?
Контакт «SmartPort» приемника после перепрошивки начинает работать как «FPort».
Как настроить sbus / smartport на пк naze32 rev5 (f1)
Настройки SBUS и SmartPort очень похожи на разных полетных контроллерах в Cleanflight, разница в оборудовании. Очевидно, что Naze32 (на процессоре F1) требует немного больше усилий и работы руками чем в случае контроллеров на процессорах F3 (Tornado, Dodo и т.п.). Но нет ничего невозможного.
Как мы уже ранее объясняли в статье про сравнение PPM и SBUS, сигнал SBUS на выходе приемника FrSky инвертирован (т.е. перевернут) и некоторые полетные контроллеры не могут его распознать и понять.
Существует множество способов инвертировать сигнал, например, использовать самодельный инвертер сигналов.
Заметим, что только платы Rev5 и более старые требуют этого, rev6 распознает SBUS без инверторов.
Как настроить и использовать soft serial?
Проще всего продемонстрировать это на примерах. Но в вкратце, всего 2 шага:
- Включить SoftSerial feature
- Назначить SoftSerial TX|RX на свободные порты при помощи Betaflight Resource Remapping
Руководство по использованию Resource Remapping.
После перезагрузки ПК увидите новый последовательный порт — SoftSerial.
Как соединить smartport и naze32
Для телеметрии вам снова понадобится последовательный порт. Однако на Naze32 вы этого сделать не можете, потому что там всего 2 аппаратных UART, и они уже используются: один для подключения SBUS, а второй зарезервирован для подключения по USB. Кое-кто писал, что этот способ подойдет и для Rev6 (но у меня ее нет, так что не могу ни проверить, ни опровергнуть).
Однако хорошая новость в том, что есть возможность использовать SoftSerial (software serial, программную эмуляцию последовательного порта) для подключения SmartPort. Контакты RC5 и RC6 доступны для SoftSerial на плате Naze32.
Замечу, что RGB светодиоды подключаются к RC5, то при использовании SoftSerial, придется отключить LED_strip.
Имейте ввиду, что нужно соединить 2 контакта вместе (RC5 и RC6). Марсело сделал разъем в котором контакты спаяны друг с другом. Другой конец кабеля подключен к SmartPort порту приемника (на картинке зеленый провод).
Причина, по который SmartPort использует только один провод для приема и передачи в том, что протокол полудуплексный. Именно это и эмулируется замыканием TX и RX и включением SoftSerial.
С приемником D4R-II RX вам нужно подключить телеметрию только к RC6 (softSerial TX), но очевидно, что есть разница с X4R-SB, на котором SmartPort нужно подключить к обоим контактам – RC5 и RC6. Марсело пытался, но у него не получилось, пока он не соединил контакты вместе.
В конфигураторе CleanFlight вы должны выбрать Telemetry и SoftSerial на вкладке Configuration.
Затем на вкладке Ports выберите SoftSerial1 и SMART PORT, AUTO.
К консоли (CLI) наберите Telemetry Invert = ON или 1, в зависимости от версии CleanFlight. В последней версии используются значения ON и OFF вместо 0 и 1.
И еще раз проверьте в консоли включены ли эти функции.
Как мы узнаем, что SmartPort телеметрия работает?
Итак, чтобы проверить сдвиньте контроллер в любом направлении, и посмотрите меняются ли значения AccX и AccY (если вы не отключили акселерометр). Если постоянно показывается 0, то это может значить как то, что акселерометры выключены, так и то, что телеметрия не работает.
Для отображения правильной высоты, вы должны вначале включать коптер, и только затем Taranis (передатчик). Если вы вначале включите Taranis, он покажет неправильные значения.
Отметим, что в старых версиях прошивки Taranis напряжение основного аккумулятора показывалось как Cells, но теперь это не работает, новое значение – Vfas.
Naze32 с подключенными SBUS и Smartport будет выглядеть примерно так:
На этом все! Если у вас есть что сказать – пишите в комментариях.
Напряжение аккумулятора
Чтобы активировать мониторинг напряжения, подключите контакт VBAT полетного контроллера к аккумулятору или подобный контакт на PDB. Убедитесь, что соблюдаете полярность.
В наши дни есть очень много ПК, которые можно питать напрямую от LiPo аккумулятора, что позволяет сразу контролировать напряжение, следовательно, дополнительный проводок VBAT уже не нужен.
Настраиваем betaflight для работы с crossfire
Заключительный этап — настройка Betaflight.
Переходим на вкладку Ports в Betaflight Configurator, включаем «Serial RX» на том порту, куда подключен Crossfire приемник. Нажимаем «Save«.
Открываем вкладку «Configuration«, в разделе «Receiver» выбираем «Serial-based receiver«, и затем, ниже, «CRSF«.
Не забудьте включить телеметрию (Telemetry) и нажать «Save«.
Последний шаг, переходим на вкладку «Receiver«, тут вы должны видеть реакцию на движения стиков. Это значит, что приёмник работает! Если реакции нет, тогда попробуйте проверить и поменять «Channel Map» (см выше).
Проверяем конечные точки (1000 и 2000), затем средние точки (1500), читаем тут про настройку.
Стики не двигаются? Возможно, включена инверсия сигнала. Попробуйте дать команду в консоли:
set serialrx_inverted = OFF
Если ничего не работает, возвращаемся к началу инструкции и проверяем провода, настройки Output Map, и параметры Betaflight.
На этом всё, Betaflight настроена для работы с Crossfire! 🙂
Чтобы убедиться в правильности работы телеметрии перейдите на страницу Telemetry в аппаратуре управления, затем выберите пункт «Discover new sensors», после этого должны появиться новые данные, включая VFAS — напряжение аккумулятора.
Вот руководство, в котором объясняется что такое LQ и RSSI, и как их отобразить на экране (англ).
Настраиваем lua скрипты
На пульте можно запустить LUA скрипты для изменения кучи параметров Betaflight, например: PID, рейты, looptime, параметры фильтров, канал видеопередатчика и его выходную мощность!
Настройка практически такая же, как и для SmartPort, только не нужно менять настройки Betaflight, т.к. мы это уже сделали (например, включили телеметрию). Единственная вещь, которую нужно сделать — загрузить LUA скрипты в Таранис!
Настраиваем sbus и smartport на пк f4
Некоторые полетные контроллеры на F4 не поддерживают Smart Port напрямую, потому что в них нет аппаратной инверсии сигнала. Следовательно, вам придется еще раз инвертировать сигнал, чтобы SPort заработал.
Вот инструкция как получить неинвертированный SBUS и SmartPort на приемниках FrSky.
Если на вашем ПК c F4 имеются специальные порты для SBUS и SmartPort, то процесс подключения аналогичен ПК на F3 (см выше).
Настраиваем taranis для использования crossfire
Создаем новую модель в передатчике. Проще всего сделать копию существующий и переименовать ее, например, в Crossfire. Если хотите создать модель с нуля — вот инструкция (англ).
Кратко нажимаем Menu, переходим на страницу Model Setup, перемещаемся вниз до «Internal RF» (внутренний модуль) и выбираем режим «OFF» (отключить).
Далее настраиваем параметр «External RF» (внешний модуль), ставим «CRSF» и меняем параметр Channel Range (диапазон каналов) на «CH1-16«.
После того, как вы это сделали и вышли из меню, модуль Crossfire должен включиться (на нём загорятся светодиоды).
Настраиваем голосовые предупреждения
Очень полезная функция Тараниса — возможность сообщать что-то голосом, по умолчанию установлен приятный женский голос. Передатчик может передавать вам информацию проговаривая её прямо во время полета, так что не придется смотреть на экран. Мы можем настроить переключатели чтобы запросить напряжение аккумулятора, или настроить так, чтобы передатчик предупредил нас голосом, когда RSSI становится очень низким и критическим.
Я использую 3 «голосовых» сценария:
- Таранис предупреждает меня, когда напряжение аккумулятора падает ниже 3,44 В
- После арминга коптера, Таранис каждую минуту напоминает мне напряжение аккумулятора
- Если тумблер SH включен, то Таранис проговаривает текущее напряжение
Чтобы этого добиться, я создал логический тумблер L1 (Logical Switch L1) со значением Cell = 3,44. В настройках функций (special functions) я создал SF1, которая постоянно смотрит за значением L1, и если он активен, то проигрывает звук (низкий заряд аккумулятора).
Также я создал SF2, чтобы проговаривать текущее напряжение, когда SH нажат. Переключатели SF3 и SF4 нужны для моего таймера. SF5 — проговаривает напряжение каждые 60 секунд, если тумблер арминга включен, в моем случае — это SF в нижнем положении.
Настраиваем приёмник в таранисе
После привязки приёмника можно настраивать как передатчик, так и приёмник при помощи LUA скриптов. Если вы не видите пункта «XF Micro/Nano RX», это значит, что приёмник не привязан или выключен.
Первое что нужно сделать — это настроить выходы на приёмнике, чтобы он мог обмениваться данными с полетным контроллером.
Чтобы это сделать, выбираем «XF Micro/Nano RX«, прокручиваем вниз до «Output Map» (карта выходов) и выбираем «Output 1» = «CRSF TX«, а для «Output 2» ставим «CRSF RX«. Всё! 🙂
Теперь настраиваем передающий радиомодуль.
Самое важное — убедиться, что выбран правильный частотный диапазон, в США это 915 МГц, а в Европе — 868 МГц. Если использовать не тот диапазон, то результат будет не очень надежным, а сигнал слабым и некачественным.
Для типичной конфигурации коптера в большинстве случаев будет достаточно 250 мВт выходной мощности. А автоматическое изменение мощности (Dyn. power) можно отключить.
Начиная с версии 2.4. максимальная выходная мощность Micro-модуля увеличена со 100 мВт до 250 мВт (англ).
Параметр Mode — задает число каналов, при использовании 8 каналов задержка при передаче сигнала будет меньше, чем при использовании 12 каналов. Убедитесь, что телеметрия включена, а failsafe в режиме Cut, т.е. моторы остановятся в случае пропадания сигнала, а коптер просто упадет, что минимизирует риски.
Настройка экранов телеметрии в taranis
Передатчик нужно настроить чтобы:
- показывать напряжение
- предупреждать о низком напряжении
- предупреждать о слабом сигнале (RSSI)
- показывать дополнительную информацию (высоту и т.д.)
В меню моделей Тараниса переходим к телеметрии, долгим нажатием кнопки Page. У телеметрии есть три экрана, и мы можем выбрать как информацию будет на них отображаться.
В примерах выше я настроил экран 1 для показа значений числами: напряжение аккумулятора, побаночное напряжение и RSSI (помимо телеметрии значение RSSI можно получить в свободном PPM канале).
Экран 2 будет показывать те же значения, но в виде графиков (столбцов). Минимальное значение 3,3 В, а максимальное 4,1. Tmr1 — это таймер, поставленный на 7 минут — моё обычное время полета.
Параметры на экранах телеметрии:
- Cells — напряжение аккумулятора
- Cell — напряжение аккумулятора, деленное на число ячеек
Общее напряжение измеряется полетным контроллером, так что невозможно получить напряжение каждой банки по отдельности. Значение Cell используется в уведомлениях о низком заряде.
Настройка через betaflight/cleanflight configurator
При использовании плат на F3, F4 или F7 нужно настроить телеметрию через конфигуратор.
На закладке «Ports«, выберите «FrSky» в выпадающем списке «Telemetry» у того последовательного порта, к которому вы подключили телеметрию.
Не забудьте активировать функцию «Telemetry» на закладке «Configuration»
Недостаточно последовательных портов? давайте использовать led_strip для smartport
Если на вашем ПК имеется контакт LED_Strip и вы не подключили светодиоды, тогда можно превратить этот контакт в порт SoftSerial и использовать его для SmartPort или SmartAudio.
В консоли набираем «resource» и видим, что LED_Strip — это B06.
Назначаем B06 на SoftSerial 1, для этого вводим:
resource LED_STRIP 1 none resource SERIAL_TX 11 B06 save
Включаем фичу «SoftSerial» в Betaflight, теперь вы должны увидеть SoftSerial1 на закладке Ports. Выбираем «SmartPort» в столбце «Telemetry Output».
Если что-то не работает, см советы в первом примере.
Обновляем opentx
Чтобы избежать ненужных проблем и багов, установите свежую версию OpenTX. Вот инструкция для Тараниса.
Ограничения, связанные с использованием softserial
Нет ничего идеального, при использовании SoftSerial появляются некоторые ограничения:
- SoftSerial не подходит для задач, которые требуют частого обмена большим объемом информации, например OSD или SerialRX
- SoftSerial потребляет много процессорного времени:
- на ПК с F1 не получится включить SoftSerial в Betaflight, просто не хватит ресурсов проца
- возможно не лучший вариант и на платах с F3, особенно если вы хотите сократить время цикла (looptime), и использовать некоторые другие ресурсоёмкие функции
- на некоторых ПК, softSerial отключен в официальных прошивках, но его можно включить в кастомной прошивке
- Можно включить всего 2 SoftSerial одновременно
Подключение телеметрии
У D4R-II имеется внешний порт для аналоговой телеметрии. В комплекте с приемником есть 4-х контактный кабель — черный, белый, красный и зеленый провода.
Мы будем использовать только черный и зеленый провода, т.е. землю и RX. Белый и красный нужны для других целей, нам они сейчас не важны. Их можно вытащить из разъема или обрезать. В принципе, можно использовать только зеленый провод, без черного (земля).
Если ПК на F3, F4 или F7, просто подключите телеметрию (зеленый провод) к контакту TX свободного последовательного порта (UART).
В случае плат на F1, типа Naze32:
- Зеленый провод к Telemetry « »
- Черный провод к «-«
Если провода подключены правильно, то Taranis сможет получать данные. Замечу, что при использовании Naze32 телеметрия будет доступна, только после арминга.
Полетные контроллеры
ПК на F3, F4 или F7 со свободным последовательным портом. Убедитесь, что у вас свежая версия Betaflight.
Привязываем приёмник crossfire к передатчику
Привязка приёмников Crossfire делается очень просто (в большинстве случаев), активировать режим привязки можно при помощи LUA скрипта. Такие скрипты поставляются с OpenTX начиная с версии 2.2., так что ничего не придется качать. 🙂
Пошаговая инструкция для привязки приемников Crossfire:
- Включаем приёмник, должен мигать зеленый светодиод, это значит, что он ждет начала процедуры привязки (если горит красный, тогда нажмите кнопку bind на приёмнике)
- Включаем передатчик и запускаем Crossfire LUA скрипт:
- Долгое нажатие на Menu, входим в Radio Setup (настройки передатчика). Нажимаем Page чтобы добраться до страницы «SD Card«
- Выбираем папку CROSSFIRE и долго жмем enter на файле crossfire.lua, в меню выбираем «execute» (выполнить)
- На следующем экране выбираем XF Micro TX
- Далее выбираем Binding (как показано на картинке)
- Появится сообщение «Binding…», сам процесс привязки займет несколько секунд
- Если в приемнике слишком старая прошивка, тогда вам предложат её обновить, это займет несколько минут. После перепрошивки приемник будет быстро мигать зеленым (загрузка), затем зеленые светодиоды на приемнике и передатчике перестанут мигать и будут гореть постоянно.
- После привязки T16 автоматически переходит в обычный режим, а светодиод на приемнике перестает мигать и постоянно горит зеленым.
Выходим из меню, нажав Exit. Переходим к настройке приёмника.
Примеры использования softserial
Вот несколько типичных примеров использования. Во всех примерах я использую ПК Betaflight F4, но большинство шагов и примеров подойдет и для других полетников.
Решение проблем с fport
Если у вас приемник привязан к передатчику, а Betaflight не реагирует на стики, тогда попробуйте поменять инвертирование сигнала в настройках (on или off):
set serialrx_inverted = ON save
Если не работает телеметрия, тогда попробуйте разные значения (on и off):
set serialrx_halfduplex = ON save
Ещё можно попробовать сделать новый поиск сенсоров в Таранисе (Rediscover Sensor).
Сколько человек может одновременно летать, используя crossfire?
Согласно данным от TBS — одновременно может летать до 50 человек. В тесте летало 12 человек, связь была заметно хуже, но все равно можно было летать, так что TBS не рекомендует превышать это значение 🙂
Ставим радиомодуль crossfire в taranis
Радиомодуль просто вставляется в отсек позади пульта. Ставьте его аккуратно, не повредите контакты.
Crossfire полностью совместим с Taranis X9D и Jumper T16. Работает с Taranis QX7 и Horus X10S, но есть небольшие недостатки, например, нельзя использовать макс. скорость передачи, что вызывает сообщение о потере телеметрии.
Устанавливаем антенну приемника
Если вы уже использовали другие системы радиоуправления, то вы удивитесь необычно крупной антенне и столкнетесь с проблемой — как её крепить? Вот статья (англ.) с описанием способов крепления антенн Crossfire.
Там несколько примеров с разными антенными: включая стоковый диполь и не убиваемую «Immortal T».
Чтобы добиться максимально возможного радиуса уверенного приема постарайтесь располагать антенну так, чтобы рама её не затеняла. Не сгибайте антенну и старайтесь правильно её ориентировать.
Антенну можно поставить практически в любое место на коптере, главное, чтобы её не повредили винты, все очень сильно зависит от рамы. Не забудьте поискать 3Д-печатный крепеж на Thingiverse.
Хакнутый, «неинвертированный» сигнал smartport (f4)
Если у вас полетный контроллер на F4 и нет выделенного пина для SmartPort (со встроенным инвертором), тогда читаем вот это руководство и находим «неинвертированный» сигнал в приемнике.
Приемник R9MM — первый приемник с неинвертированным SmartPort сигналом. Надеюсь, они и дальше будут выпускать новые приемники без инверсии.
Пишем в консоли
set serialrx_halfduplex = ON set serialrx_inverted = OFF save
Если у вас ПК F4 имеет встроенный инвертор, и вы используете оригинальный, инвертированный сигнал с приемника, тогда вводим вот это:
set serialrx_halfduplex = OFF set serialrx_inverted = ON save