
Этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место.
Для сборки робота c клешнёй я предлагаю инструкцию, а для быстрого старта – демонстрационную программу:
- После старта робот «делает зарядку» — разминает клешню. А как же иначе? Зарядку нужно делать всем!
- После зарядки робот сканирует пространство перед собой на расстоянии до 30 см., поворачиваясь на угол от -90 до +90 градусов (0 градусов – это стартовое положение).
- Если предмет обнаружен, робот подъезжает к нему хватает, едет обратно, разворачивается назад на угол -180 или 180 (смотря, что ближе), проезжает на 10 – 30 см. (первый раз на 30 см., второй — на 20 и третий — на 10) и бросает его. Затем возвращается назад.
- Когда собрано 3 предмета, робот засыпает: программа останавливается.
Вот схема движения робота:
Работу программы в действии можно посмотреть на видео:
Также роботом с клешнёй можно управлять с помощью мобильного приложения RoboLiterate:
Файлы:
Вот видео (обратите внимание, что ползунок справа нужно чуть приподнять наверх, чтобы клешня хорошо хватала предметы):
Инструкция для сборки робота с клешнёй и демонстрационная программа ниже:
Ещё один способ управления роботом с клешней показан на этом видео:
Здесь управление роботом сделано от первого лица с помощью смартфона, планшета и приложения RoboCam. Как установить и использовать это приложение читайте в следующих статьях. Скачать готовые настройки RoboCam для управления роботом с клешнёй можете здесь.

Манипуляторы. Инструкции по сборке. LEGO EV3.Подробнее
Как собрать захват Lego mindstorms EV3 / A grab mechanism Lego ev3Подробнее
Захват на малом моторе инструкция сборки Lego mindstorms EV3 / A grab mechanism for robot ev3Подробнее

Lego EV3 захват на большом моторе. A grab mechanism ev3Подробнее

Простой захват и подъем инструкция сборки. Lego mindstorms EV3 gripping fingersПодробнее

Сборка простого захвата с использованием малого мотора Lego Mindsorms EV3Подробнее

Актуальное
Этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место.
Для сборки робота c клешнёй я предлагаю инструкцию, а для быстрого старта – демонстрационную программу:
- После старта робот «делает зарядку» — разминает клешню. А как же иначе? Зарядку нужно делать всем!
- После зарядки робот сканирует пространство перед собой на расстоянии до 30 см., поворачиваясь на угол от -90 до +90 градусов (0 градусов – это стартовое положение).
- Если предмет обнаружен, робот подъезжает к нему хватает, едет обратно, разворачивается назад на угол -180 или 180 (смотря, что ближе), проезжает на 10 – 30 см. (первый раз на 30 см., второй — на 20 и третий — на 10) и бросает его. Затем возвращается назад.
- Когда собрано 3 предмета, робот засыпает: программа останавливается.
Вот схема движения робота:
Работу программы в действии можно посмотреть на видео:
Также роботом с клешнёй можно управлять с помощью мобильного приложения RoboLiterate:
Файлы:
Вот видео (обратите внимание, что ползунок справа нужно чуть приподнять наверх, чтобы клешня хорошо хватала предметы):
Инструкция для сборки робота с клешнёй и демонстрационная программа ниже:
Ещё один способ управления роботом с клешней показан на этом видео:
Здесь управление роботом сделано от первого лица с помощью смартфона, планшета и приложения RoboCam. Как установить и использовать это приложение читайте в следующих статьях. Скачать готовые настройки RoboCam для управления роботом с клешнёй можете здесь.

ClawBot — этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место. Для сборки необходим набор 45544.
Комплектация
- большие моторы — 2 шт.
- средний мотор — 1 шт.
- МПК — 1 шт.
- датчик расстояния ультразвуковой- 1 шт.
- датчик касания — 1 шт.
- гироскоп — 1шт.
Скачать инструкцию по сборке данного робота можно ниже
Перейти к содержанию
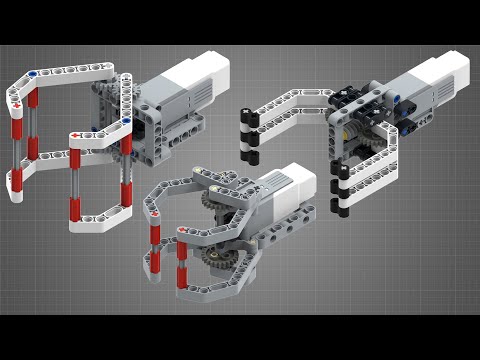
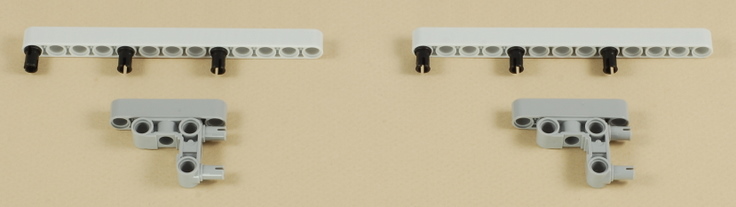
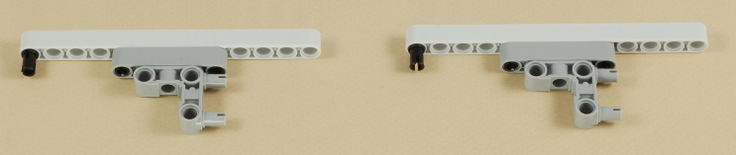
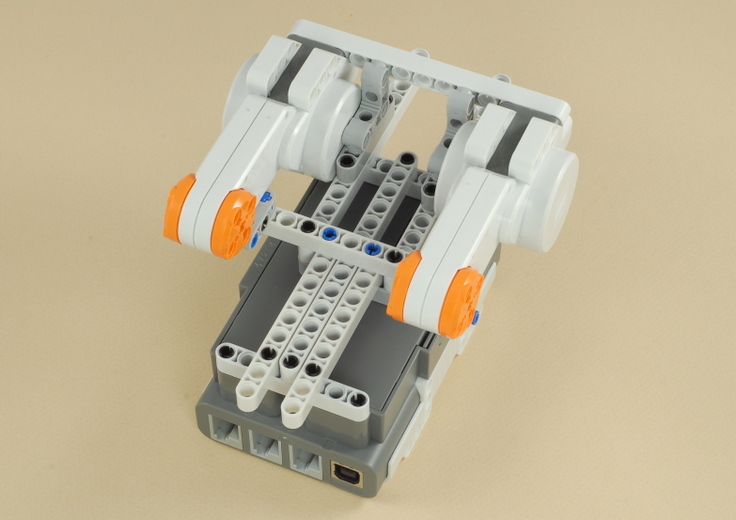
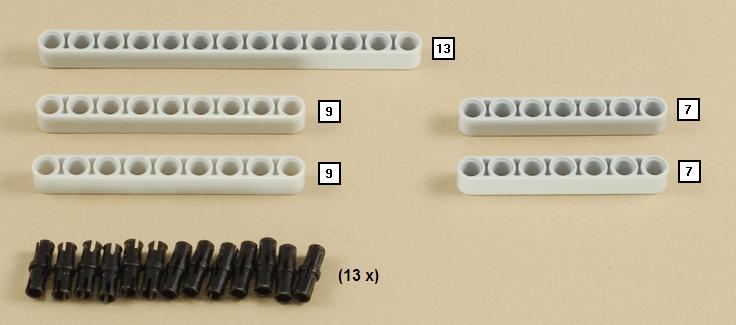
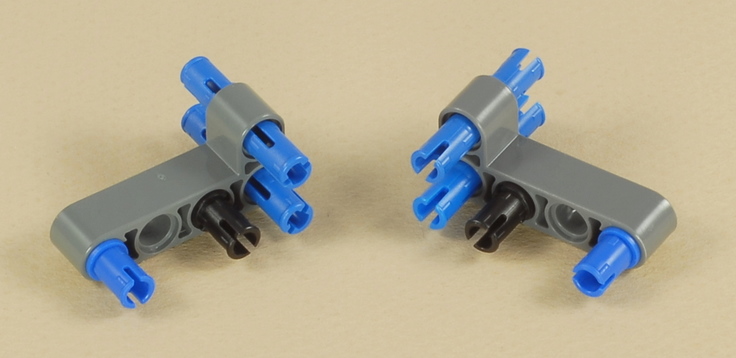
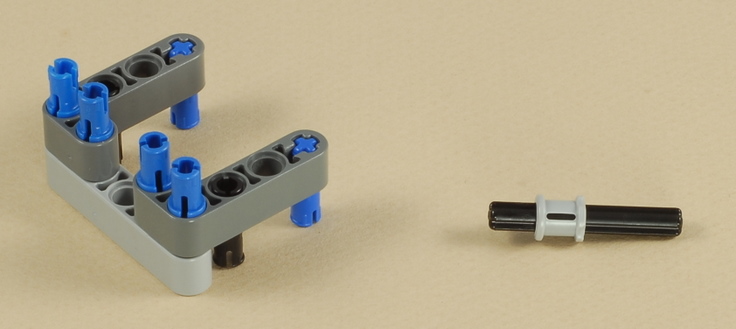
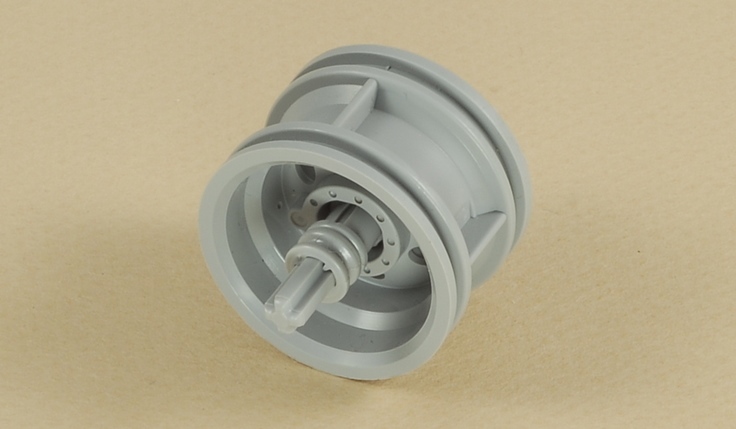
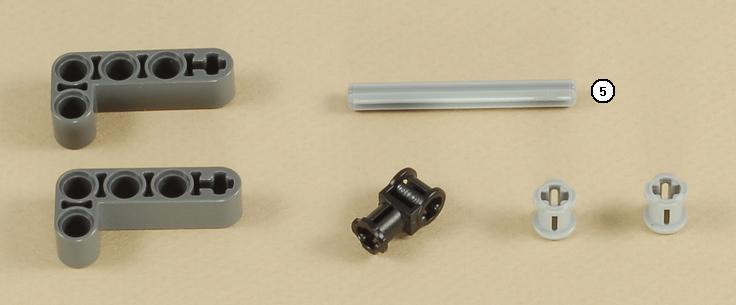
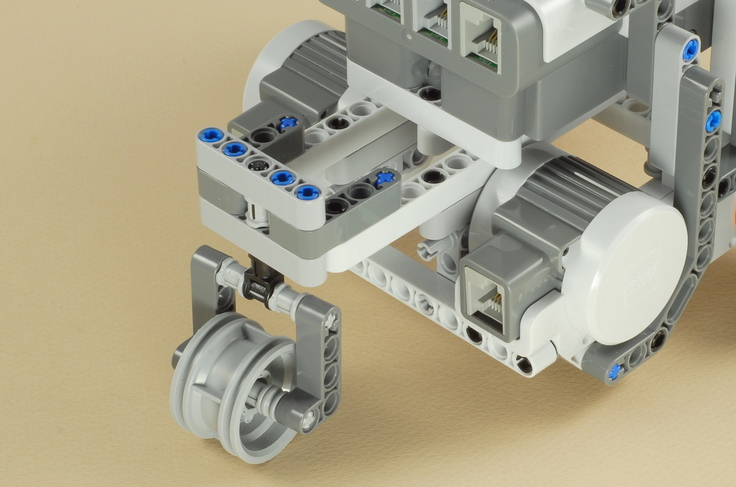
В этой статье — инструкция по сборке достаточно распространенного варианта захвата Lego EV3 на червячной передаче. Захват надежно удерживает предметы и не раскручивается после остановки мотора. Подойдет для занятий по робототехнике или соревнований. Переходите по ссылке «Скачать инструкцию» ниже в описании.
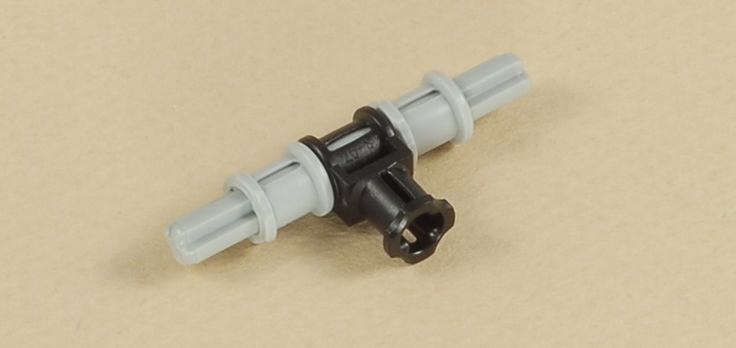
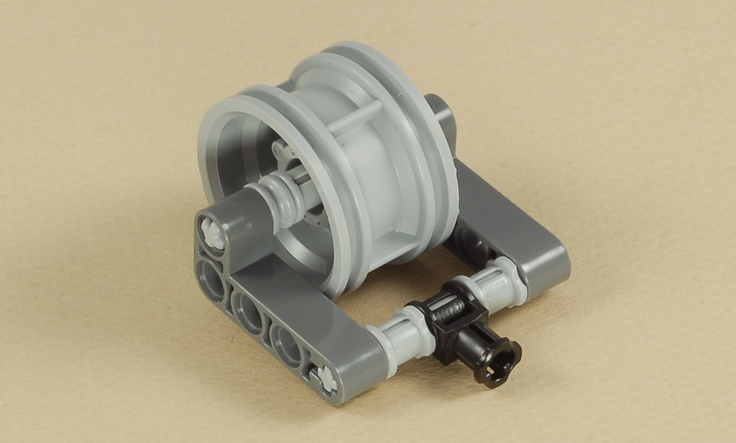
Фото:



Оборудование: базовый набор Lego Mindstorms Education EV3.
Модель: ЗСМ2-Ч-В1 — захват на среднем моторе двухпальцевый червячный, вариант 1.
Механизмы: червячная передача, рычаг.
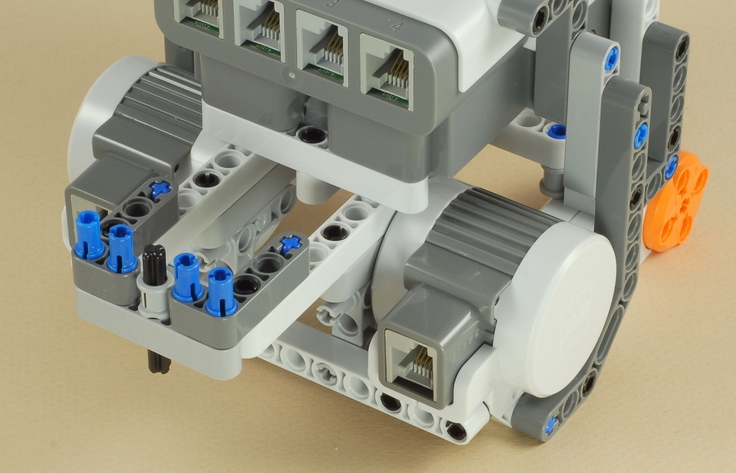
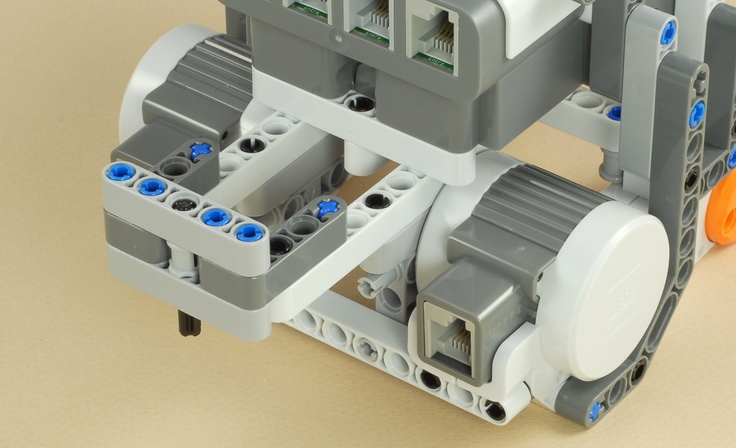
Особенности. Крутящий момент (сила) увеличивается за счет понижающей червячной передачи. Передаточное отношение — 24:1, т.е. 24 оборота на входе и 1 на выходе.
Силы захвата достаточно, чтобы поднять кубик без использования резинок (смотрите фото).
Недостатки:
— перекручивание червяка может привести к слишком сильному сжатию предмета и его повреждению или поломке пластиковых деталей.
Задачи:
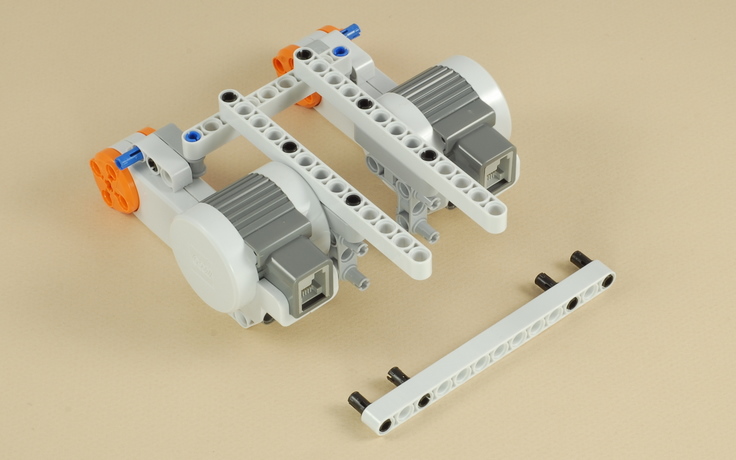
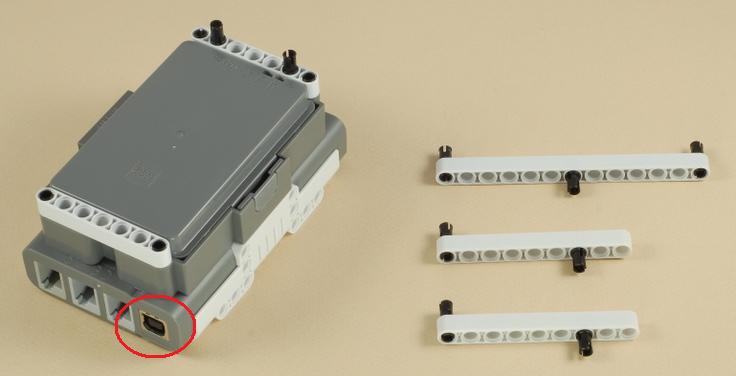
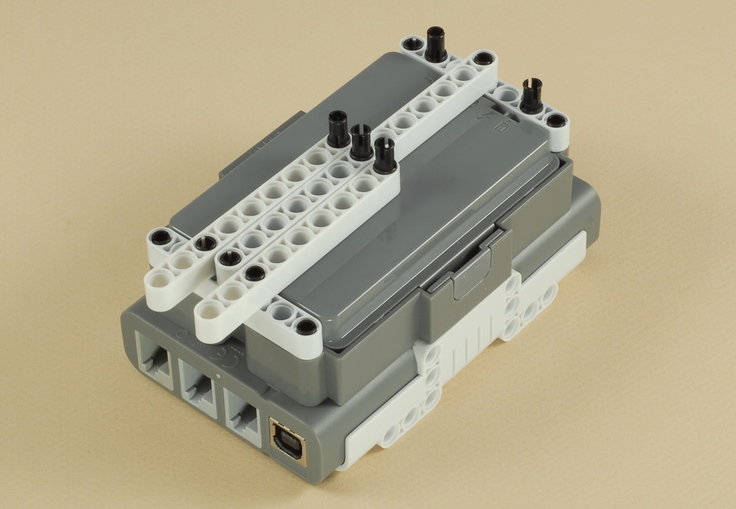
- Собери захват, используя инструкцию.
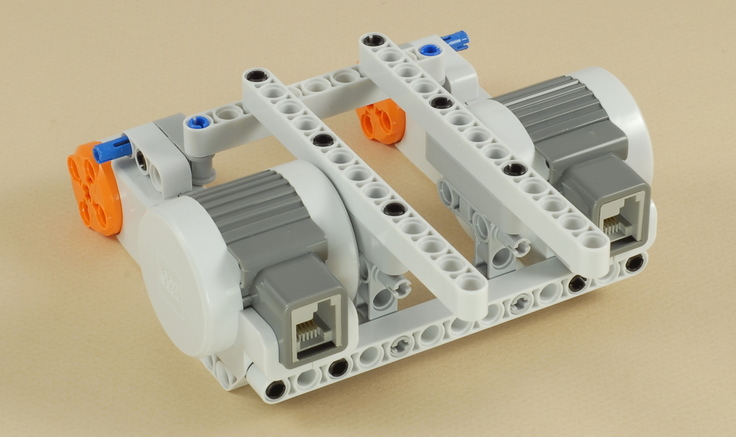
- Соедини захват с робоплатформой или установи на манипулятор. Подключи средний мотор к блоку EV3.
- Доработай конструкцию захвата в зависимости от решаемой задачи.
- Выполни предложенные задачи по переносу или сортировке предметов.
( 1 оценка, среднее 5 из 5 )
Кузьминых С.Д. 1, Гребнева Д.М. 1
1РГППУ (ф) в г. Нижнем Тагиле
Текст работы размещён без изображений и формул.
Полная версия работы доступна во вкладке «Файлы работы» в формате PDF
Одним из ведущих направлений современной прикладной науки является робототехника. По всему миру проводятся конкурсы и состязания роботов для школьников и студентов. Лидирующие позиции в области школьной робототехники на сегодняшний день занимает фирма Lego (подразделение Lego Education) с образовательными конструкторами серии Mindstorms, Fischertechnik.
Робототехника – это прикладная наука, занимающаяся разработкой автоматизированных систем. Она опирается на такие дисциплины, как механика, физика, электроника, математика и информатика. Использование Лего – конструкторов в образовательной деятельности повышает мотивацию обучающихся к обучению и помогает достичь следующих образовательных целей:
коллективная выработка идей;
развитие словарного запаса и навыков общения при объяснении работы модели;
проведение систематических наблюдений и изменений;
логическое мышление и программирование заданного поведения модели;
установление причинно-следственных связей;
написание и воспроизведение сценария с использованием модели для наглядности и драматургического эффекта;
экспериментальное исследование, оценка (измерение) влияния отдельных факторов;
анализ результатов и поиск новых решений.
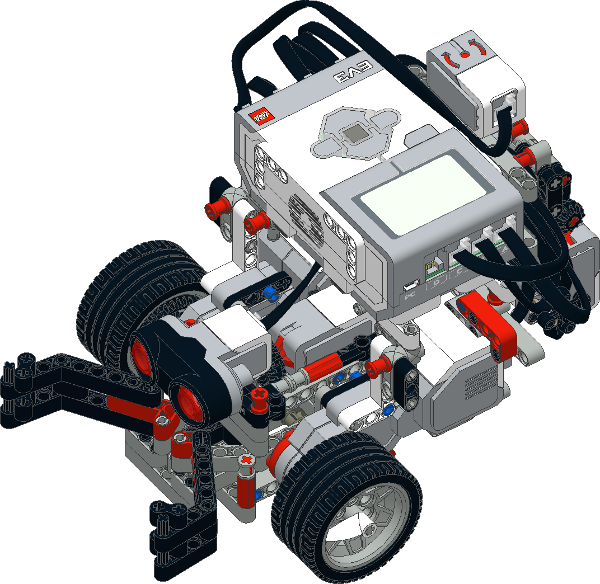
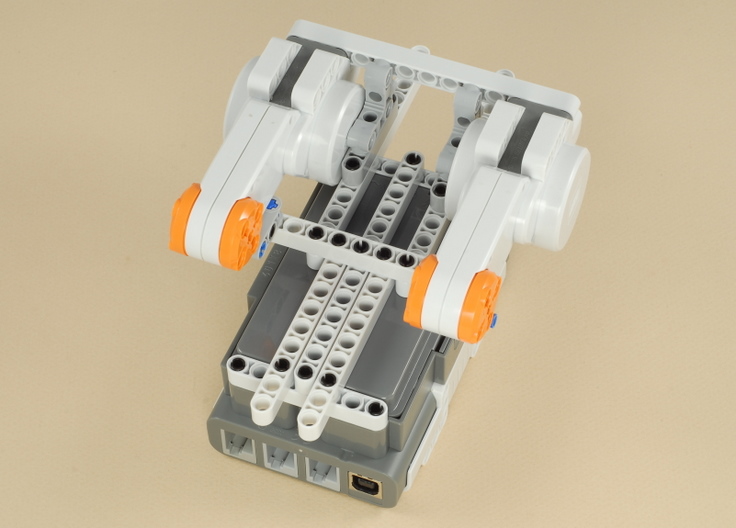
Одним из самых распространенных видов роботов являются роботы-манипуляторы. Для знакомства с конструкцией манипулятора школьникам можно предложить собрать робота с клешней [2], который может помочь в уборке помещения (рис. 1). Этот робот умеет не только хватать, но и приподнимать предметы. Например, убирать игрушки в определенное место.
Рис. 1. Робот с клешней
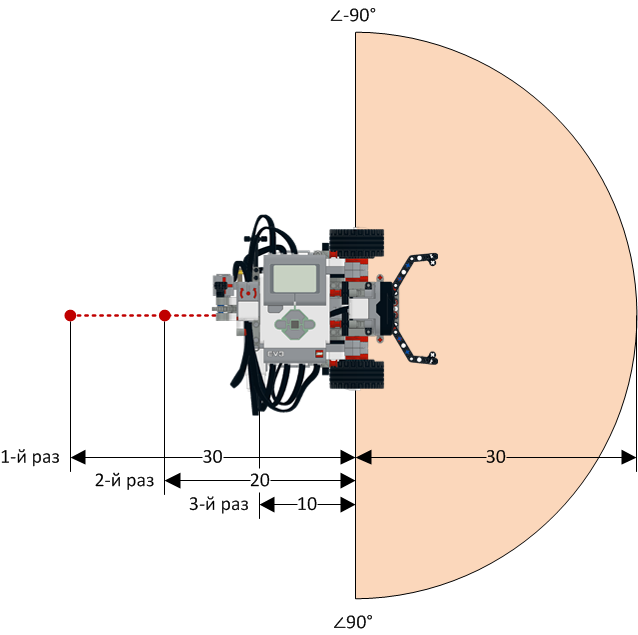
В данном проекте робот выполняет следующие действия по схеме (рис. 2):
После старта робот «делает зарядку» – разминает клешню.
После зарядки робот сканирует пространство перед собой на расстоянии до 30 см., поворачиваясь на угол от -90 до +90 градусов (0 градусов – это стартовое положение).
Если предмет обнаружен, робот подъезжает к нему хватает, едет обратно, разворачивается назад на угол -180 или 180, проезжает на 10 – 30 см. (первый раз на 30 см., второй — на 20 и третий — на 10) и бросает его. Затем возвращается назад.
Когда собрано 3 предмета, робот засыпает: программа останавливается.
Рис. 2. Схема движения робота
Для управления роботом нужна программа [1]. Данная программа пишется в среде программирования LEGO MINDSTORMS Education EV3 (приложение 1). Вначале были созданы шесть вспомогательных блоков: Grab, Throw, Turn, FindObj, FindEndOfObj, TurnTo. Каждый из блоков отвечает за определенное действие. Данные блоки были включены в итоговый вариант программы.
В данной работе был рассмотрен один из вариантов робота – помощника робот с клешней. Эту модель робота можно использовать в реальности, в различных сферах деятельности (сфера обслуживания, грузоперевозки, строительство и т.д.).
Робототехника позволяет разнообразить уроки информатики и других предметов, глубже изучить некоторые темы, позволяет раскрыть потенциал учащегося и помочь ему в дальнейшем с выбором будущей профессии. Вне зависимости от того, какой профессиональный путь изберет сегодняшний школьник в будущем, его работа так или иначе будет связана с использованием новейших технологий.
Список литературы
Демонстрационная программа для робота с клешней [Электронный ресурс]. URL: http://www.proghouse.ru/component/jdownloads/finish/4-razrabotki/39-demonstratsionnaya-programma-dlya-robota-s-kleshnjoj?Itemid=0
Инструкция для сборки робота с клешней [Электронный ресурс]. URL: http://www.proghouse.ru/component/jdownloads/finish/5-distributivy/38-instruktsiya-dlya-sborki-robota-s-kleshnjoj-iz-konstruktora-lego-mindstorms-ev3?Itemid=0
Никитина Т.В. Образовательная робототехника как направление инженерно-технического творчества школьников. – Челябинск: Изд-во Челяб. гос. пед. ун-та, 2014. – 169 с.
Тарапата В. В. Пять уроков по робототехнике //Информатика: Первое сентября.-2014.-№11.-С.12-25
Приложение 1
Программа движения робота с клешней
Интернет — магазин Educube.ru
г. Москва,
ул. 2-я Звенигородская, д. 13, стр. 15,
Юр. адресс: 111397, г. Москва, Федеративный пр-кт, д. 4, кв. 47
офис XI
Звоните:
+7 (495) 120-21-86
info@educube.ru
Мы работаем: c 09:00 до 18:00
Обновлено: 28.11.2023


Этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место.

Для сборки робота c клешнёй я предлагаю инструкцию, а для быстрого старта – демонстрационную программу:
- После старта робот «делает зарядку» — разминает клешню. А как же иначе? Зарядку нужно делать всем!
- После зарядки робот сканирует пространство перед собой на расстоянии до 30 см., поворачиваясь на угол от -90 до +90 градусов (0 градусов – это стартовое положение).
- Если предмет обнаружен, робот подъезжает к нему хватает, едет обратно, разворачивается назад на угол -180 или 180 (смотря, что ближе), проезжает на 10 – 30 см. (первый раз на 30 см., второй — на 20 и третий — на 10) и бросает его. Затем возвращается назад.
- Когда собрано 3 предмета, робот засыпает: программа останавливается.
Вот схема движения робота:

Работу программы в действии можно посмотреть на видео:
Также роботом с клешнёй можно управлять с помощью мобильного приложения RoboLiterate:
Вот видео (обратите внимание, что ползунок справа нужно чуть приподнять наверх, чтобы клешня хорошо хватала предметы):
Инструкция для сборки робота с клешнёй и демонстрационная программа ниже:
Инструкция для сборки робота с клешнёй из базового набора конструктора LEGO Mindstorms Education EV3 (45544).
В версии 2 (от 14.10.2016): датчик расстояния отодвинут чуть вперёд, за счёт чего кнопка за ним (порт 1) нажимается правильно, также под модулем EV3 выделено больше места, чтобы вилки проводов ни во что не упирались.
Демонстрационная программа для робота с клешнёй, собранного из базового набора конструктора LEGO Mindstorms Education EV3 (45544).
Для запуска программы требуется ПО LEGO Mindstorms Education EV3 версии 1.1.1 или выше.
Ещё один способ управления роботом с клешней показан на этом видео:
Этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место.
Для сборки робота c клешнёй я предлагаю инструкцию, а для быстрого старта – демонстрационную программу:
- После старта робот «делает зарядку» — разминает клешню. А как же иначе? Зарядку нужно делать всем!
- После зарядки робот сканирует пространство перед собой на расстоянии до 30 см., поворачиваясь на угол от -90 до +90 градусов (0 градусов – это стартовое положение).
- Если предмет обнаружен, робот подъезжает к нему хватает, едет обратно, разворачивается назад на угол -180 или 180 (смотря, что ближе), проезжает на 10 – 30 см. (первый раз на 30 см., второй — на 20 и третий — на 10) и бросает его. Затем возвращается назад.
- Когда собрано 3 предмета, робот засыпает: программа останавливается.
Вот схема движения робота:
Работу программы в действии можно посмотреть на видео:
Также роботом с клешнёй можно управлять с помощью мобильного приложения RoboLiterate:
Вот видео (обратите внимание, что ползунок справа нужно чуть приподнять наверх, чтобы клешня хорошо хватала предметы):
Инструкция для сборки робота с клешнёй и демонстрационная программа ниже:
Инструкция для сборки робота с клешнёй из базового набора конструктора LEGO Mindstorms Education EV3 (45544).
В версии 2 (от 14.10.2016): датчик расстояния отодвинут чуть вперёд, за счёт чего кнопка за ним (порт 1) нажимается правильно, также под модулем EV3 выделено больше места, чтобы вилки проводов ни во что не упирались.
Демонстрационная программа для робота с клешнёй, собранного из базового набора конструктора LEGO Mindstorms Education EV3 (45544).
Для запуска программы требуется ПО LEGO Mindstorms Education EV3 версии 1.1.1 или выше.
Ещё один способ управления роботом с клешней показан на этом видео:
Этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место.
Для сборки робота c клешнёй я предлагаю инструкцию, а для быстрого старта – демонстрационную программу:
- После старта робот «делает зарядку» — разминает клешню. А как же иначе? Зарядку нужно делать всем!
- После зарядки робот сканирует пространство перед собой на расстоянии до 30 см., поворачиваясь на угол от -90 до +90 градусов (0 градусов – это стартовое положение).
- Если предмет обнаружен, робот подъезжает к нему хватает, едет обратно, разворачивается назад на угол -180 или 180 (смотря, что ближе), проезжает на 10 – 30 см. (первый раз на 30 см., второй — на 20 и третий — на 10) и бросает его. Затем возвращается назад.
- Когда собрано 3 предмета, робот засыпает: программа останавливается.
Вот схема движения робота:
Работу программы в действии можно посмотреть на видео:
Также роботом с клешнёй можно управлять с помощью мобильного приложения RoboLiterate:
Вот видео (обратите внимание, что ползунок справа нужно чуть приподнять наверх, чтобы клешня хорошо хватала предметы):
Инструкция для сборки робота с клешнёй и демонстрационная программа ниже:
Инструкция для сборки робота с клешнёй из базового набора конструктора LEGO Mindstorms Education EV3 (45544).
В версии 2 (от 14.10.2016): датчик расстояния отодвинут чуть вперёд, за счёт чего кнопка за ним (порт 1) нажимается правильно, также под модулем EV3 выделено больше места, чтобы вилки проводов ни во что не упирались.
Демонстрационная программа для робота с клешнёй, собранного из базового набора конструктора LEGO Mindstorms Education EV3 (45544).
Для запуска программы требуется ПО LEGO Mindstorms Education EV3 версии 1.1.1 или выше.
Ещё один способ управления роботом с клешней показан на этом видео:
Всё на русском языке о роботах LEGO MINDSTORMS EV3 и NXT: различные инструкции к конструкторам разных версий, информация о версиях, скриншоты готовых моделей, фото и видео занятий по робототехнике. Также мы выкладываем пошаговые инструкции по созданию и программированию разных видов роботов лего из конструктора версии 8547. У нас можно скачать поурочное планирование факультатива робототехники для учеников 6-8 классов. Планируем добавить всю необходимую для роботехника-любителя информацию. Всё будет доступно всегда и бесплатно!

Нового андроида научили работать в домашней обстановке

Робот-учёный впервые совершил настоящее открытие
Adam работает в университете Аберистуита (Aberystwyth University). Зарплату ему не платят, но денег, вложенных в проект ‘Робот-учёный’ (Robot Scientist), стартовавший, к .
Рубрика: Робот LEGO MINDSTORMS EV3 и NXT инструкции
На первой странице мы с Вами познакомимся с внешним видом конструкторов lego mindstoms ev3 и инструкциями (інструкциї lego) на русском языке для них.
Сейчас доступны к скачиванию статьи с готовыми пошаговыми инструкциями по сборке различных моделей роботов из конструктора лего ев3 версии 313313 и 45544 (робот lego mindstorms ev3).
Руководство пользователя (EV3 Home) для домашней версии, артикул 31313 — инструкция на русском языке для lego mindstorms ev3.
Элементная база (из каких деталей состоит набор), как выглядит содержимое коробки лего 31313.
Базовый набор LEGO MINDSTORMS Education EV3 (артикул 45544).
Версия набора — образовательная (для школ).
Элементная база набора.
Инструкция lego mindstorms ev3:
руководство пользователя (EV3 education) для учебной версии, артикул 45544.
лего EVO 3 презентация pptx с описанием и возможностями набора.
C 2013 года в продаже доступны наборы по цене от 350$ (около 30 000 рублей)! Понятно, что наборы LEGO MINDSTORMS версии EV3 в несколько раз «круче» предыдущего NXT!
Имеются две модификации: HOME и EDUCATIONS (Домашняя и образовательные версии). Каждая версия имеет свои особенности. Но в каждой можно собрать отличные модели роботов из лего! Домашняя попроще и подешевле, а образовательная версия с лицензионным ПО LABVIEW для рабочей группы от NATIONAL INSTRUMENS, естественно, подороже.
Купить набор в Зеленогорске (Красноярский край) можно в компании «Компас». Скачивайте, ознакамливайтесь с ПО, внешним видом и способом соединения, настройки и программирования новой модели от лего!
Робота можно использовать для соревнования «Шорт трек» категории «Hello, robot!». Инструкция (презентация) содержится 45 слайдов, многие слайды являются повторами с разных углов обзора.
Возраст обучающихся: 4 – 8 классы. УМК любой. Презентация выполнена при помощи ПО Lego Digital Designer ver.4.3.:
полная инструкция по сборке в pptx
Бонусные модели 6 роботов EV3 на одной платформе (6 роботов в 1):

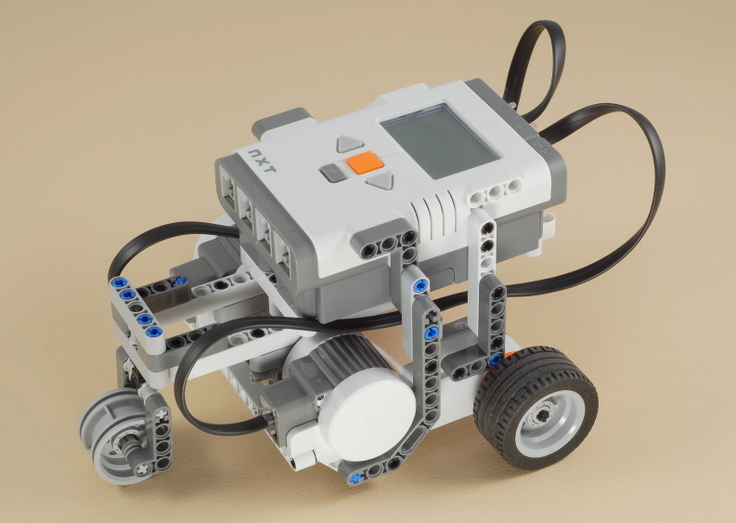
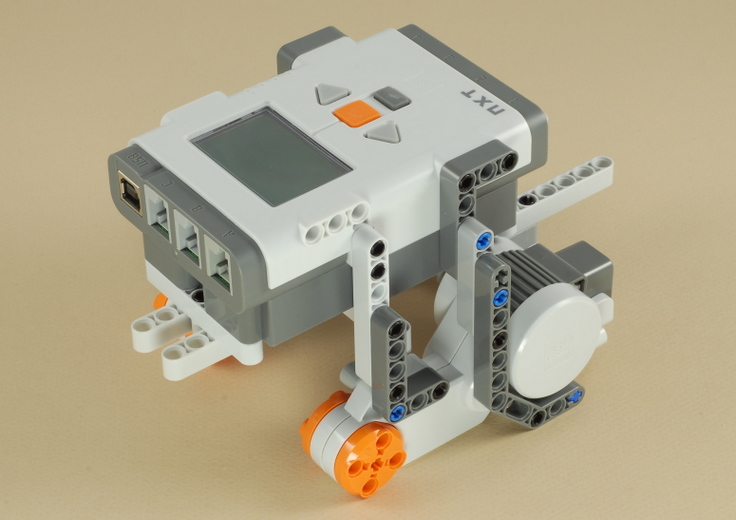
Трёхколёсный бот может быть использован как простой автомобиль, умеющий поворачивать или в качестве базовой модели для других проектов. Так как робот может повернуть в любую сторону, то он также поможет нам понять, как программируется блок перемещения. В конце статьи имеются две простые базовые программы, которые демонстрируют различные виды поворотов с помощью кнопок блока.
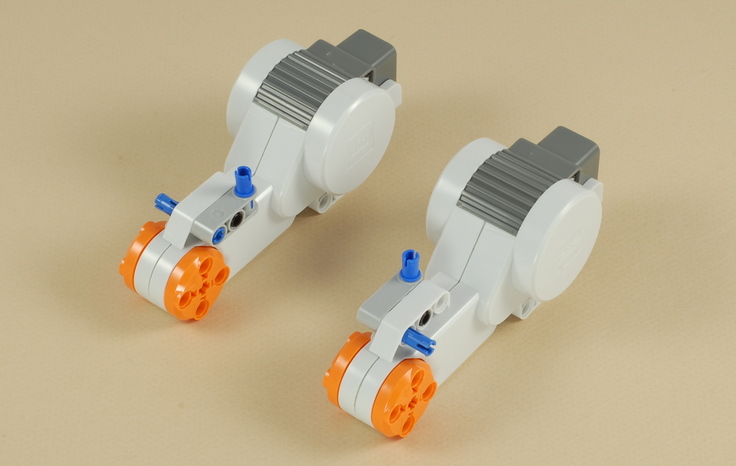
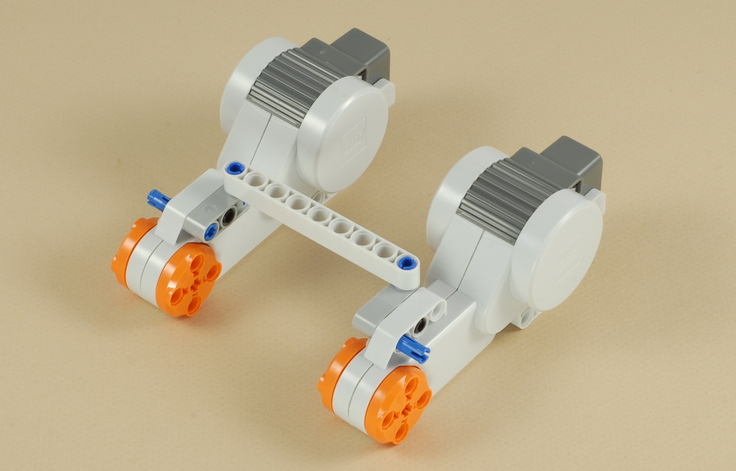
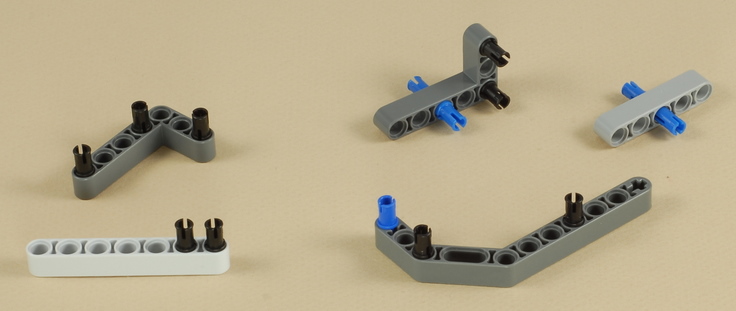
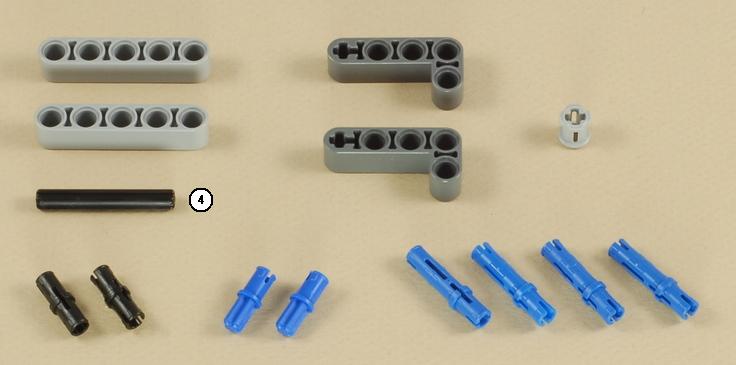
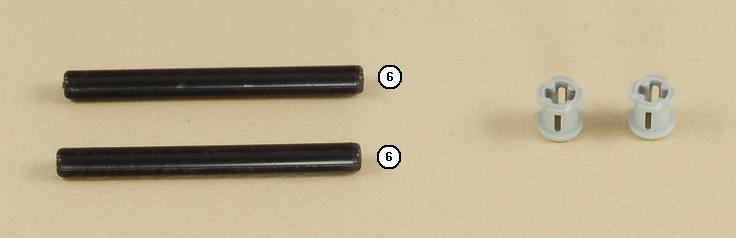
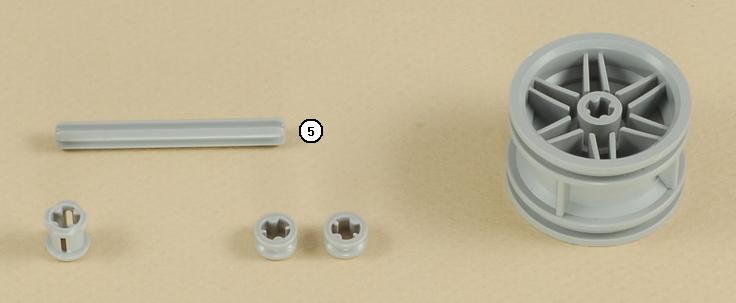
Пошаговая инструкция


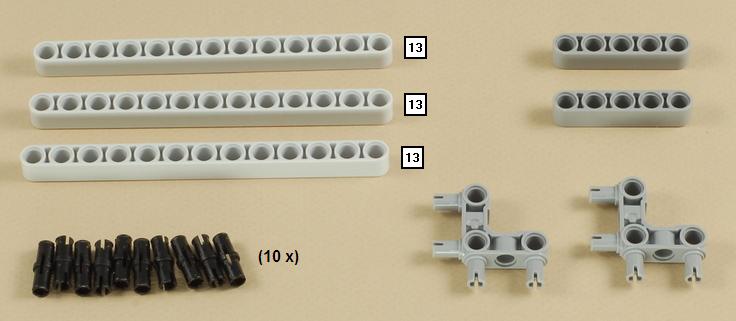
Важное замечание: Следуйте на шаг 3-АА при использовании батареи типа АА, или шаг 3-Li при использовании литиевой NXT аккумуляторной батареи.
3-AA (ТОЛЬКО при использовании батарей типа AA)

3-Li (ТОЛЬКО при использовании литиевого аккумулаторного блока)

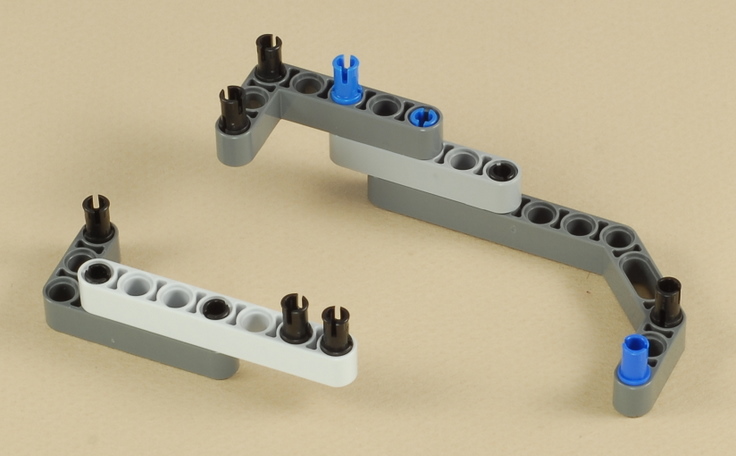

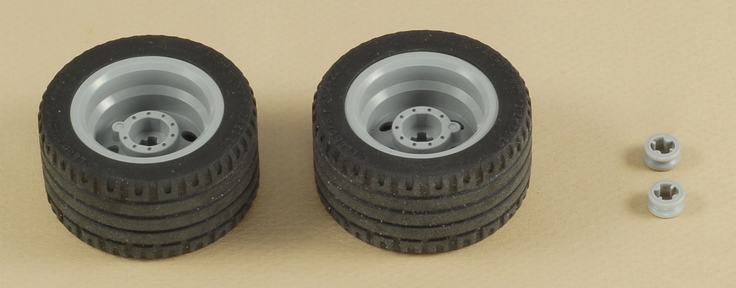


Важно: левый провод пропускайте по левой стороне, а правый провод по правый (не пересекайте провода).
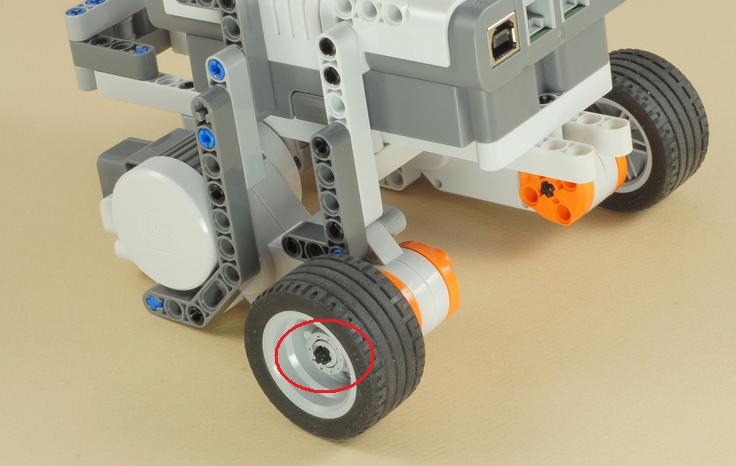
Совет по строительству: Балансируйте вес!
При создании трёхколёсного робота, важно учитывать весовой баланс робота. Если Вы хотите хорошую поворачиваемость, то большая часть веса робота по-возможности должна быть над ведущими колесами. Не часть веса должна оставаться и на третьем колесе чтобы робот не опрокидывался.
Если больший вес у третьего колеса, робот может опрокинуться или ведущие колеса могут начать проскальзывать. Однако, если слишком большой вес попадает на ведущие колеса, то при движении назад робот может неожиданное. опрокинуться назад!
Мы провели эксперименты с разной развесовкой колёс. Выяснили, что общий вес робота 624 грамма, 466 грамм из которых приходится на ведущие колеса. То есть до 75% (466/624) веса должны приходится на ведущие колеса.
ClawBot — этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место. Для сборки необходим набор 45544.
Комплектация
- большие моторы — 2 шт.
- средний мотор — 1 шт.
- МПК — 1 шт.
- датчик расстояния ультразвуковой- 1 шт.
- датчик касания — 1 шт.
- гироскоп — 1шт.
Скачать инструкцию по сборке данного робота можно ниже


Создатели LEGO MINDSTORMS EV3 подготовили инструкции по сборке 5 базовых роботов.
EV3RSTORM
Прямоходящий боевой робот, передвигается на гусеницах и управляется с помощью джостика. Руки его оснащены пушкой и пропеллером.
СКАЧАТЬ ИНСТРУКЦИЮ
R3PTAR
Робот-рептилия. Реагирует на приближение противника и делает бросок вперед.
СКАЧАТЬ ИНСТРУКЦИЮ
GRIPP3R
Еще один робот на гусеничном ходу, может поднимать и перевозить небольшие грузы. Идеально подходит для проведения соревнований, кто быстрее доставит груз на базу
СКАЧАТЬ ИНСТРУКЦИЮ
TRACK3R
Вездеход на гусеничном ходу. Оснащен молотом, который способен нанести сокрушительный удар сопернику. При желании, робота можно оснастить скорострельным пулеметом.
СКАЧАТЬ ИНСТРУКЦИЮ
SPIK3R
Робот-скорпион. Вместо жала скорострельный пулемет. Умеет хватать добычу передними клешнями.
СКАЧАТЬ ИНСТРУКЦИЮ