

Название проекта: Робот-манипулятор Arm H25 из LEGO Mindstorms
Платформа: LEGO Mindstorms
Робот-манипулятор Arm H25 — стандартная модель для базового образовательного набора LEGO Mindstorms EV3 Education. Инструкцию для сборки робота-манипулятора Arm H25 можно использовать и с домашней версией LEGO Mindstorms EV3 — в этом случае чтобы построить робота потребуется найти несколько дополнительных деталей.
Инструкция по сборке.
Использованные компоненты: базовый набор LEGO Mindstorms Education EV3, артикул 45544

Сайт проекта: http://robotsquare.com/2013/10/01/education-ev3-45544-instruction/
Другие проекты на этой платформе:
- Двуногий робот из Arduino, LEGO и деталей 3D печати
- LEGO EV3 робот-художник
- SpinnerBot из LEGO Mindstorms
- LegoGun — двуствольный пистолет из Lego Mindstorms EV3
- Спирограф — рисующий робот из LEGO Mindstorms EV3
- Бесполезная коробка из Lego Mindstoms EV3
- Гексапод из Lego Mindstorms EV3
- Роботизированная рука из Lego Mindstorms EV3
- Подъемные механизмы из LEGO Mindstorms
- Прибор автоматической подачи одноразовых стаканчиков из LEGO Mindstorms
- Робот-кабан-динозавр DINOR3X из LEGO Mindstorms EV3
- Znap — робот из LEGO Mindstorms EV3
- Робот-сортировщик (Color Sorter) из LEGO Mindstorms EV3
- Робот Educator Vehicle из LEGO Mindstorms EV3
- Робот-сигвей (Gyro Boy) из Lego Mindstorms
- Робот-гексапод NXTAPOD из LEGO Mindstorms. Модель Даниэля Бенедеттелли
- Робот-щенок (Puppy) из LEGO Mindstorms EV3
- Лимоноид — робот, продающий напитки
- Киноаппарат из Lego Mindstorms
- Принтер из Lego Mindstorms «STALKER ver. 2.0»
- Робот-пожарный из LEGO Mindstorms
- Крестики-нолики — ARBUZIKI-TEAM
- EZ Wilber — говорящий балансирующий робот из Lego Mindstorms
- Ev3 Print3rbot — робот-художник из Lego Mindstorms
- 3D-принтер из Lego печатает шоколадом
- Lego Mindstorms NXT 2.0 играет в шахматы
- Робот-гексапод из Lego Mindstorms NXT 2.0
- Робоноги из Lego Mindstorms
- Lego Mindstorms-экскаватор, управляемый Microsoft Kinect
- Lego-робот DIZZ3
- Крестики-нолики для Lego-робота
- Lego Mindstorms EV3 3D-принтер 2.0
Перейти в каталог DIY-проектов роботов
Как добавить робопроект в каталог?

Теги: Lego Education, Lego Mindstorms, робот-манипулятор
Dep-courses
- РЕГИСТРАЦИЯ
- ВОЙТИ
- НОВОСТИ
- ЭКСПЕРТЫ
- НАПРАВЛЕНИЯ
- СОРЕВНОВАНИЯ
- РЕЕСТР
- ГЛАВНАЯ
- — РЕГИСТРАЦИЯ
- — ВОЙТИ
- — НОВОСТИ
- — 3D-МОДЕЛИРОВАНИЕ
- — ГРАФИЧЕСКИЙ ДИЗАЙН
- — ПРОГРАММИРОВАНИЕ
- — ЭЛЕКТРОНИКА
- — РОБОТОТЕХНИКА
- СОРЕВНОВАНИЯ
- РЕЕСТР
E-mail
Dep-courses@ya.ru
LEGO MINDSTORMS EV3 семь инструкций по сборке.
Конвеер-сортировщик шариков
Робот сортирует шарики по двум корзинам.
СКАЧАТЬ ИНСТРУКЦИЮ
Вездеход
Робот на гусеницах
СКАЧАТЬ ИНСТРУКЦИЮ
Машина с пониженной передачей
В конструкции используется передача для увеличения силы
СКАЧАТЬ ИНСТРУКЦИЮ
Робот-чертежник
Робот рисует разметку
СКАЧАТЬ ИНСТРУКЦИЮ
Робот манипулятор
Робот позволяет перемещать объекты в ограниченном пространстве.
СКАЧАТЬ ИНСТРУКЦИЮ
Робот-бот
Простой бот для программирования передвижения.
СКАЧАТЬ ИНСТРУКЦИЮ
Робот-сортировщик
Робот программируется при помощи цветных квадратиков
СКАЧАТЬ ИНСТРУКЦИЮ
Политика в отношении обработки персональных данных
Сборка мобильного манипулятора с параллелограммным механизмом

Мобильный манипулятор Lego EV3 с «параллелограммным» механизмом — модель с очень распространенным устройством манипулятора для подъема и перемещения предметов. Данная модель построена на базе набора Lego Mindstorms Education EV3, основываясь на свойствах параллелограмма.
Комплектация
- большие моторы — 2 шт.
- средний мотор — 1 шт.
- МПК — 1 шт.
Скачать инструкцию по сборке данного робота можно ниже



Данный материал взят с сайта https://robo-wiki.ru/robotics-lego-ev3/mobile-manipulator-lego-ev3-mmp-v1/
![]()
Программы для роботов
В zip архиве.
9695.zip
Compressed Archive in ZIP Format
6.2 MB
![]()
Вездеход — Вахрамеев Иван
9695 Grand Four Belt Rover100.pdf
Adobe Acrobat Document
8.7 MB
![]()
Скорпион — Гарбузов Николай
9695 Scorpion100.pdf
Adobe Acrobat Document
6.6 MB
![]()
Сортировщик -Дубровин Василий
9695 Belt-driven Colour Sorter100.pdf
Adobe Acrobat Document
8.9 MB
![]()
Часы (Кремлевские) — Евтеев Тихон
9695 Classic Clock100.pdf
Adobe Acrobat Document
5.9 MB
![]()
Автомобиль — Есаков Слава
9695-Intelligent_Car100.pdf
Adobe Acrobat Document
8.0 MB
![]()
Перевозчик — Знаменская Саша
9695 Tribot100.pdf
Adobe Acrobat Document
5.9 MB
![]()
Манипулятор — Кархачева Маша
9695 Robot Arm100.pdf
Adobe Acrobat Document
7.0 MB
Обновлено: 27.11.2023
В этой работе соберём робота-манипулятора из одного базового набора Lego EV3 и запрограммируем его движение. Главная задача манипулятора – положить некоторый предмет (мяч) в корзину. Для поиска корзины добавим ультразвуковой датчик, который использует принцип эхолокации при измерении дальности до объектов.


Оборудование: базовый набор Lego Mindstorms Education EV3, мячик для пинг-понга, ёмкость/корзина.
Описание. Манипулятор (лат. manipulare — руководить, управлять с помощью рук) — сложный механизм для управления положением предметов. Манипуляторы могут перемещать, вращать, переставлять, сортировать различные предметы.
В этой работе соберём робота-манипулятора из одного базового набора Lego EV3 и запрограммируем его движение.
Главная задача манипулятора – положить некоторый предмет (мяч) в корзину. Для поиска корзины добавим ультразвуковой датчик, который использует принцип эхолокации при измерении дальности до объектов. Корзины может и не быть, а рабочий сектор поиска руки манипулятора ограничен 180 градусами.
Нам нужно придумать такую программу, которая позволила бы решить поставленную задачу, не выведя манипулятор из строя (нужно вращать руку и корпус манипулятора только в рабочем диапазоне углов поворота).
Язык программирования: EV3-G.
Чтобы скачать файлы, вы должны зарегистрироваться или войти на сайт, а также иметь платный аккаунт доступа. Если у вас есть действующий аккаунт доступа, ниже увидите кнопку для загрузки.
Разработайте, соберите и запрограммируйте роботизированную систему, которая могла бы захватывать и переставлять предметы.

План урока
Подготовка
— Ознакомьтесь с материалами для учителя.
— Если необходимо, разработайте план урока, используя материалы для начала работы из ПО «Лаборатория EV3» или Приложения для программирования EV3. Это поможет познакомить учащихся с конструкторами LEGO ® MINDSTORMS ® Education EV3.
Объяснение (30 мин.)
— Дайте учащимся задание придумать несколько прототипов.
— Предложите им найти новые конструкторские и программные решения.
— Попросите каждую пару учащихся собрать и испытать два решения.
— Раздайте учащимся большие листы клетчатой бумаги, цветные карандаши или маркеры.
Объяснение (60 мин.)
— Попросите учащихся протестировать свои решения и выбрать лучшее из них.
— Убедитесь, что они могут подготовить свои таблицы результатов испытаний.
— Дайте каждой команде немного времени, чтобы завершить свой проект; затем соберите материалы, в которых они зафиксировали результаты своей работы.
Дополнение (60 мин.)
— Дайте учащимся немного времени, чтобы подготовить итоговые отчёты.
— Проведите обсуждение, в ходе которого каждая группа расскажет о результатах своей работы.
Оценка
— Дайте оценку работе каждого учащегося.
— Для упрощения этой задачи вы можете использовать раздел оценки.
Начало обсуждения
Манипуляторы — один из видов промышленных роботов, которые могут перемещать предметы с одного заданного места на другое. Для более точного и безопасного захвата и установки предметов различной формы, веса и уровня хрупкости можно использовать разные виды захватов.

PLAY
Поощряйте активное обсуждение идей.
Предложите учащимся ответить на следующие вопросы.
- Что представляют собой манипуляторы и где они используются?
- Какой приводной механизм можно использовать, чтобы поднять предмет?
- Как робот может переместить предмет?
- Каким образом робот может осторожно и точно переместить предмет?
Попросите учащихся задокументировать свои первоначальные идеи и объяснить, почему они выбрали то или иное решение для создания своего первого прототипа. Попросите их описать, каким образом они будут оценивать свои идеи в процессе выполнения данного проекта. В процессе рассмотрения и повторения учащиеся получат определённую информацию, которую смогут использовать для оценки эффективности своих решений.
Дополнительно
Развитие языковых навыков
Для развития языковых навыков попросите учащихся:
- использовать свои записи, наброски и/или фотографии, чтобы подвести итоги этапа разработки и подготовить итоговый отчёт;
- снять видео, в котором рассказывалось бы о процессе разработки их решения, начиная с первоначальных идей и заканчивая финальным этапом реализации проекта;
- подготовить презентацию, рассказывающую об их программе;
- подготовить презентацию, рассказывающую об их решении и аналогичных системах, используемых в реальной жизни, а также описывающую новые изобретения, которые можно создать на основе их решения.
Вариант 2
Для развития языковых навыков попросите учащихся:
Исследуйте различные механизмы, использующиеся для производства лекарственных препаратов и вакцин, и затем подготовьте рассказ о работе в автоматизированной фармацевтический лаборатории, сделав акцент на преимуществах и недостатках автоматизации процесса приготовления лекарств.
Обсудите вопросы обеспечения безопасности данных и защиты авторских прав на формулы лекарств, способных принести владельцам миллиардные прибыли и хранящихся в онлайн-системах, в том числе:
возможные последствия утери формул лекарств;
преимущества хранения конфиденциальной информации в онлайн-системах.
Развитие математических навыков
На этом уроке учащиеся собрали робота-манипулятора. Оценка и улучшение производительности крайне важны для любых автоматизированных систем. Машинное обучение — процесс, при помощи которого роботы-манипуляторы оценивают собственную производительность и вносят в производственные процессы изменения, необходимые для ее улучшения.
Для развития математических навыков и изучения машинного обучения попросите учащихся:
- дать определения терминов точности и аккуратности и применить их в своих робототехнических проектах;
- определить переменные, по которым можно оценить точность и аккуратность разработанных учащимися систем (например, скорость робота может влиять на аккуратность, точность или на обе эти характеристики);
- подготовить и провести мини-эксперимент, чтобы определить, влияют ли выбранные переменные на аккуратность, точность или на обе эти характеристики.
Советы по сборке
Идеи для вдохновения
Дайте учащимся возможность собрать несколько моделей, инструкции для которых можно найти по следующим ссылкам. Предложите им изучить работу этих систем и на их основе подготовить Техническое задание.
Советы по тестированию
Предложите учащимся сконструировать собственную испытательную установку и разработать порядок испытаний, который позволил бы выбрать наилучшее решение. Следующие советы помогут учащимся провести испытания.
- Отметьте положение карандаша/маркера, установленного в механизме, на клетчатой бумаге. Это позволит возвращать его в то же положение каждый раз при проведении нового испытания.
- Используйте квадраты 1 x 1 см на клетчатой бумаге, чтобы записывать результаты каждого испытания.
- Используйте цветные карандаши или маркеры, чтобы отметить ожидаемое и фактическое положение перемещённого роботом предмета.
- Подготовьте таблицы результатов испытаний, чтобы записывать в них результаты своих наблюдений.
- Оцените точность работы своего робота, сравнив ожидаемые и фактические результаты.
- Проведите испытания по меньшей мере три раза.
Пример решения
Далее приведён пример решения, соответствующего критериям Технического задания.


PLAY
Советы по программированию
Пример программы, созданной в EV3 MicroPython
Перспективы профессионального развития
Учащиеся, которым было интересно данное задание, могут попробовать себя в следующих сферах деятельности:
- информационные технологии (программирование);
- производство и инженерное дело (машиностроение).
Возможности для оценки
Журнал педагога
Разработайте критерии оценки, максимально соответствующие вашим задачам, например следующие.
1. Задание выполнено не полностью.
2. Задание выполнено полностью.
3. Результаты превзошли ожидания.
Используйте следующие критерии для оценки успеваемости учащихся.
- Учащиеся могут оценить различные варианты решений на основе выбранных критериев и компромиссов между ними.
- Учащиеся самостоятельно разрабатывают работающие и креативные решения.
- Учащиеся могут понятно рассказать о своих идеях.
Самостоятельная оценка
Когда учащиеся получат первые сведения об эффективности моделей, дайте им время, чтобы оценить свои решения. Вы можете задать следующие вопросы.
- Ваше решение соответствует критериям технического задания?
- Можно ли сделать движения вашего робота более точными?
- Какие способы решения этой задачи нашли другие команды?
Попросите учащихся придумать и задокументировать два варианта усовершенствования их решений.
Оценка одноклассников
Организуйте процесс оценки решения одноклассниками, в ходе которого каждая группа должна оценить свой собственный проект и проекты других групп. Это поможет развивать навыки высказывания конструктивного мнения, а также совершенствовать навыки анализа и умение использовать объективные данные для аргументации своей позиции.
На этой странице собраны инструкции по сборке роботов или механизмов из стартового образовательного набора LEGO MINDSTORMS Education EV3 (45544). Кроме инструкций вы найдёте здесь видео, показывающие возможности собранных моделей, и демонстрационные программы. Для некоторых моделей даны рекомендации, с помощью каких приложений можно дистанционно управлять роботами и как настраивать эти приложения.


Имея под рукой образовательный набор LEGO Mindstorms EV3 (45544) и шарики для пинг-понга вполне можно собрать пушку, стреляющую шариками. Пушкой можно управлять со смартфона с помощью приложения RoboCam.

Если вы горите желанием сделать робота с большими колёсами из образовательного набора LEGO Mindstorms EV3 (45544), но у вас нет таких колёс, не расстраивайтесь. Вы можете изготовить их самостоятельно из толстого гофрированного картона. Как сделать робота с большими картонными колёсами, чтобы колёса нормально крутились и не отваливались, я предлагаю вам прочитать в этой статье.

Мне очень понравился проект робота-художника EV3 Print3rbot, в котором, к сожалению, используются нестандартные детали, которые нужно печатать на 3D-принтере. Я решил собрать такого же робота, но используя детали только из образовательного набора LEGO Mindstorms EV3 (45544). И у меня это получилось, правда, пришлось добавить ещё резинок.
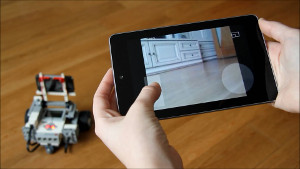
Роботом, собранным из конструктора LEGO Mindstorms EV3, вы легко можете управлять дистанционно от первого лица. Для этого вам дополнительно понадобится два смартфона, с установленным приложением RoboCam на один из них. Давайте познакомимся подробнее с приложением RoboCam и научимся им пользоваться.

Используя конструктор LEGO MINDSTORMS EV3 и веб-камеру, вы сможете провести эксперимент по обнаружению лиц в помещении. Для эксперимента подойдёт любой колёсный робот EV3, который умеет вращаться на месте, и на который вы сможете закрепить веб камеру. Робот будет сканировать помещение, поворачиваясь вокруг, а, увидев лица, будет останавливаться и дёргаться столько раз, сколько лиц увидел.
![]()
С помощью веб-камеры и образовательного набора конструктора LEGO MINDSTORMS Education EV3 (45544) вполне можно сделать робота, отслеживающего двигающийся объект. Робот сможет не только поворачивать камеру в сторону объекта, но и выдерживать определённую дистанцию до него, т.е. подъехать поближе, если объект удаляется от камеры, или отъехать подальше, если объект приближается. О том, как это сделать поговорим в этой статье.

Гимнаста выполняющего различные упражнения на турнике сделать достаточно просто, если у вас есть образовательный конструктор LEGO MINDSTORMS Education EV3 (45544). Я научил гимнаста выполнять три упражнения, а вы можете научить его и другим различным трюкам.

Гоночную машину, имитирующую болид формулы 1, можно сделать с помощью образовательного набора LEGO MINDSTORMS Education EV3 (45544). В машине сидит водитель и держится за руль. Машина дистанционно управляется с Android-смартфона.

Робот мойщик пола передвигается за счёт поворотов двух дисков параллельно полу. С помощью резинок на диски можно закрепить смоченные моющим раствором тряпки и тогда ваш пол станет немного чище.

Этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место.

Селеноход – это луноход, созданный российской командой для участия в конкурсе Google Lunar X PRIZE. В настоящий момент проект закрыт, но интересная конструкция с не менее интересной системой передвижения по лунной поверхности остались. С помощью стартового образовательного набора LEGO MINDSTORMS Education EV3 (45544) возможно собрать модель Селенохода, который будет передвигаться по такому же принципу и так же поднимать и опускать «голову».

В базовом образовательном наборе LEGO Mindstorms Education EV3 (45544) оказалось достаточно шестерёнок и других деталей, чтобы собрать часы с часовой и минутной стрелками. Кроме того, что часы точно отображают время, они издают звуковой сигнал каждый час.

В образовательном наборе конструктора Mindstorms Education EV3 всё обучение робототехники в классе ведётся с помощью приводной платформы, на колёсном ходу. Мне же захотелось сделать точно такую же платформу, чтобы на неё точно также можно было установить все датчики, но только, чтобы она передвигалась с помощью гусениц.


Этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место.

Для сборки робота c клешнёй я предлагаю инструкцию, а для быстрого старта – демонстрационную программу:
- После старта робот «делает зарядку» — разминает клешню. А как же иначе? Зарядку нужно делать всем!
- После зарядки робот сканирует пространство перед собой на расстоянии до 30 см., поворачиваясь на угол от -90 до +90 градусов (0 градусов – это стартовое положение).
- Если предмет обнаружен, робот подъезжает к нему хватает, едет обратно, разворачивается назад на угол -180 или 180 (смотря, что ближе), проезжает на 10 – 30 см. (первый раз на 30 см., второй — на 20 и третий — на 10) и бросает его. Затем возвращается назад.
- Когда собрано 3 предмета, робот засыпает: программа останавливается.
Вот схема движения робота:

Работу программы в действии можно посмотреть на видео:
Также роботом с клешнёй можно управлять с помощью мобильного приложения RoboLiterate:
Вот видео (обратите внимание, что ползунок справа нужно чуть приподнять наверх, чтобы клешня хорошо хватала предметы):
Инструкция для сборки робота с клешнёй и демонстрационная программа ниже:
Инструкция для сборки робота с клешнёй из базового набора конструктора LEGO Mindstorms Education EV3 (45544).
В версии 2 (от 14.10.2016): датчик расстояния отодвинут чуть вперёд, за счёт чего кнопка за ним (порт 1) нажимается правильно, также под модулем EV3 выделено больше места, чтобы вилки проводов ни во что не упирались.
Демонстрационная программа для робота с клешнёй, собранного из базового набора конструктора LEGO Mindstorms Education EV3 (45544).
Для запуска программы требуется ПО LEGO Mindstorms Education EV3 версии 1.1.1 или выше.
Ещё один способ управления роботом с клешней показан на этом видео:
Всё на русском языке о роботах LEGO MINDSTORMS EV3 и NXT: различные инструкции к конструкторам разных версий, информация о версиях, скриншоты готовых моделей, фото и видео занятий по робототехнике. Также мы выкладываем пошаговые инструкции по созданию и программированию разных видов роботов лего из конструктора версии 8547. У нас можно скачать поурочное планирование факультатива робототехники для учеников 6-8 классов. Планируем добавить всю необходимую для роботехника-любителя информацию. Всё будет доступно всегда и бесплатно!

Носимый компьютер — еще один этап киборгизации
Система собрана из доступных на рынке электроники и подручных устройств. Центральным ее компонентом стал портативный компьютер Sony VAIO UX380N (Intel Core Solo 1,3 ГГц, .

Торговый робот
Огромная ликвидность рынка Forex позволяет неплохо зарабатывать инвесторам, которые ежедневно принимают участие в торговых сессиях, а также трейдерам, которые посвятили н.
Рубрика: Робот LEGO MINDSTORMS EV3 и NXT инструкции
На первой странице мы с Вами познакомимся с внешним видом конструкторов lego mindstoms ev3 и инструкциями (інструкциї lego) на русском языке для них.
Сейчас доступны к скачиванию статьи с готовыми пошаговыми инструкциями по сборке различных моделей роботов из конструктора лего ев3 версии 313313 и 45544 (робот lego mindstorms ev3).
Руководство пользователя (EV3 Home) для домашней версии, артикул 31313 — инструкция на русском языке для lego mindstorms ev3.
Элементная база (из каких деталей состоит набор), как выглядит содержимое коробки лего 31313.
Базовый набор LEGO MINDSTORMS Education EV3 (артикул 45544).
Версия набора — образовательная (для школ).
Элементная база набора.
Инструкция lego mindstorms ev3:
руководство пользователя (EV3 education) для учебной версии, артикул 45544.
лего EVO 3 презентация pptx с описанием и возможностями набора.
C 2013 года в продаже доступны наборы по цене от 350$ (около 30 000 рублей)! Понятно, что наборы LEGO MINDSTORMS версии EV3 в несколько раз «круче» предыдущего NXT!
Имеются две модификации: HOME и EDUCATIONS (Домашняя и образовательные версии). Каждая версия имеет свои особенности. Но в каждой можно собрать отличные модели роботов из лего! Домашняя попроще и подешевле, а образовательная версия с лицензионным ПО LABVIEW для рабочей группы от NATIONAL INSTRUMENS, естественно, подороже.
Купить набор в Зеленогорске (Красноярский край) можно в компании «Компас». Скачивайте, ознакамливайтесь с ПО, внешним видом и способом соединения, настройки и программирования новой модели от лего!
Робота можно использовать для соревнования «Шорт трек» категории «Hello, robot!». Инструкция (презентация) содержится 45 слайдов, многие слайды являются повторами с разных углов обзора.
Возраст обучающихся: 4 – 8 классы. УМК любой. Презентация выполнена при помощи ПО Lego Digital Designer ver.4.3.:
полная инструкция по сборке в pptx
Бонусные модели 6 роботов EV3 на одной платформе (6 роботов в 1):

Читайте также:
- Как разобрать лего брелок
- Раскраски для мальчиков лего дупло
- Лучшие модели лего техник
- Как создавать своих динозавров в игре лего
- Конструктор из дерева кубики
Если вы только начинаете знакомство с миром робототехники, то сборка манипулятора EV3 – это идеальное место для начала. EV3 – это мощная платформа с большими возможностями, которая позволяет создавать разные типы роботов. Собрать манипулятор EV3 несложно, если вы следуете пошаговой инструкции.
Перед тем, как начать сборку, убедитесь, что у вас есть все необходимые детали и инструменты. Список необходимых материалов можно найти в комплекте EV3 или на сайте производителя. Приступая к сборке, не забудьте выключить питание EV3, чтобы избежать возможных проблем.
Первым шагом сборки является сборка основания манипулятора. Установите большую шестерню на маленькую и закрепите их на нижней части основания. Затем прикрепите шестерни к боковым панелям основания.
Содержание
- Как собрать манипулятор EV3: пошаговая инструкция
- Раздел 1: Подготовка
- Раздел 2: Сборка тела манипулятора
- Раздел 3: Установка моторов и датчиков
- Раздел 4: Подключение к программе
Как собрать манипулятор EV3: пошаговая инструкция
- Откройте набор EV3 и разложите все детали перед собой.
- Соедините базу робота, следуя инструкции по сборке.
- Присоедините два мотора к базе робота и закрепите их винтами.
- Установите датчики на манипулятор, используя предоставленные крепления.
- Прикрепите манипулятор к базе робота.
- Подключите двигатели и датчики к блоку EV3.
- Убедитесь, что все кабели и провода правильно подключены и установлены.
После того, как вы успешно собрали манипулятор EV3, вам останется только подключить EV3 к компьютеру и загрузить программное обеспечение для управления роботом. Теперь вы готовы к экспериментам и созданию увлекательных проектов с вашим манипулятором EV3!
Раздел 1: Подготовка
Перед тем, как начать собирать манипулятор EV3, необходимо подготовить все необходимые компоненты и инструменты. В этом разделе мы рассмотрим, что вам понадобится для успешной сборки.
Материалы:
| 1. Комплект Lego EV3. Включает в себя блок EV3, колеса, моторы и другие необходимые детали. |
| 2. Компьютер с операционной системой Windows или Mac OS. Потребуется для управления манипулятором с помощью программного обеспечения EV3. |
| 3. USB-кабель для подключения блока EV3 к компьютеру. |
Инструменты:
| 1. Крестовая отвертка. Понадобится для закручивания винтов и гаек. |
| 2. Ножницы или кусачки. Понадобятся для отделения некоторых деталей от пластиковых листов. |
| 3. Пинцет. Может использоваться для удобного захвата и установки небольших деталей. |
Убедитесь, что у вас есть все необходимое перед тем, как приступить к сборке манипулятора EV3. Приготовьте все материалы и инструменты удобно, чтобы вам было легче собирать.
Раздел 2: Сборка тела манипулятора
После сборки основы робота EV3 перейдите к сборке тела манипулятора.
1. Возьмите основу робота EV3 и установите ее на стол. Убедитесь, что робот стоит на ровной поверхности для более устойчивой сборки.
2. Возьмите большую пластину и установите ее на основу робота. Подсоедините ее к основе с помощью пластиковых крепежных элементов.
3. Следующим шагом является установка сервомоторов. Возьмите два маленьких сервомотора и установите их на боковые стороны основы робота. Убедитесь, что сервомоторы правильно вставлены и фиксируются на месте.
4. После этого возьмите две средние пластины и установите их на верхние части сервомоторов. Снова используйте пластиковые крепежные элементы для фиксации пластин к сервомоторам и основе робота EV3.
5. Теперь возьмите две длинные пластины и установите их на переднюю и заднюю части основы робота. Подсоедините пластину к сервомоторам и основе с помощью пластиковых крепежных элементов.
6. Завершите сборку тела манипулятора, установив маленькую пластину на верхнюю часть основы робота. Подсоедините пластину с помощью пластиковых крепежных элементов. Теперь тело манипулятора полностью собрано и готово к использованию.
В данном разделе мы рассмотрели, как правильно собрать тело манипулятора для робота EV3. Следующим шагом будет установка других компонентов робота, которые обеспечат функциональность и возможности манипулятора.
Раздел 3: Установка моторов и датчиков
В этом разделе мы рассмотрим, как правильно установить моторы и датчики на манипулятор EV3. Это важный шаг в процессе сборки, который позволит вашему роботу получить доступ к информации из окружающей среды и преобразовать ее в движение.
1. Перед началом установки убедитесь, что вы располагаете всем необходимым оборудованием. Вам понадобятся моторы, датчики, а также соединительные кабели, которые поставляются в комплекте с манипулятором EV3.
2. Начнем с установки моторов. Всего вам понадобятся три мотора, которые можно установить на специальные места на корпусе манипулятора. Обратите внимание, что каждый мотор имеет свой уникальный номер порта, который позволяет подключить его к блоку управления. Следуйте инструкции, прилагаемой к вашему комплекту, чтобы подключить моторы к правильным портам.
3. Теперь перейдем к установке датчиков. В зависимости от ваших потребностей, вы можете установить различные датчики, такие как сенсоры цвета, сенсоры расстояния и др. Обратите внимание, что каждый датчик также имеет свой уникальный номер порта, который позволяет подключить его к блоку управления. Подсоедините датчики к своим соответствующим портам, следуя инструкции, прилагаемой к вашему комплекту.
4. Проверьте, все ли соединения выполнены правильно и кабели хорошо прилегают к портам. Убедитесь, что все моторы и датчики установлены надежно и не двигаются. Постоянное движение или отсоединение кабелей может негативно сказаться на работе вашего манипулятора.
В этом разделе мы рассмотрели процесс установки моторов и датчиков на манипулятор EV3. Теперь ваш робот готов принимать команды и взаимодействовать с окружающей средой!
Раздел 4: Подключение к программе
1. Убедитесь, что ваш манипулятор EV3 пристыкован к компьютеру с помощью USB-кабеля.
2. Запустите программу управления манипулятором EV3 на вашем компьютере. Для этого вам может потребоваться установить специальное программное обеспечение, предоставленное производителем.
3. В программе выберите опцию «Подключение» или «Connect», чтобы установить связь между манипулятором EV3 и программой.
4. При первом подключении вам может потребоваться выбрать порт, через который ваш манипулятор EV3 подключен к компьютеру. Обычно это порт USB.
5. После успешного подключения вы должны увидеть значок или статусную строку, указывающую, что манипулятор EV3 готов к работе и связан с программой.
Теперь ваш манипулятор EV3 полностью готов к использованию. Вы можете начать программировать его или управлять им с помощью программы, предоставленной производителем.