
Создание робота футболиста EV3 — увлекательная задача, которая позволяет объединить знания в области робототехники, программирования и игровой механики. С помощью наборов LEGO Mindstorms EV3 вы можете создать своего собственного робота, способного играть в футбол с вами или другими роботами!
Эта пошаговая инструкция поможет вам создать робота футболиста EV3 без особых затрат и с минимальным количеством необходимых материалов. Вам понадобятся набор LEGO Mindstorms EV3, компьютер с установленным LEGO Mindstorms EV3 Software и немного креативности!
В ходе этой инструкции вы узнаете, как собрать основную конструкцию робота с помощью деталей LEGO, как подключить его к компьютеру и правильно настроить программу, чтобы ваш робот мог управлять мячом и забивать голы. Продолжайте читать и начинайте создавать своего собственного робота футболиста EV3 уже сегодня!
Содержание
- Создание робота футболиста EV3
- Сборка конструктора Lego Mindstorms EV3
- Программирование робота футболиста EV3
- Установка программного обеспечения
Создание робота футболиста EV3
Создание робота футболиста EV3 может быть увлекательной и интересной задачей. В этом разделе мы рассмотрим пошаговую инструкцию о том, как сделать своего собственного робота футболиста с использованием EV3.
Шаг 1: Соберите основу робота. Для этого вам понадобятся LEGO Mindstorms EV3 набор и инструкции к нему. Следуйте инструкциям для сборки основы робота, которая включает в себя корпус, колеса и двигатели.
Шаг 2: Подключите EV3 Smart Brick к основе робота. Убедитесь, что все соединения крепкие и надежные.
Шаг 3: Добавьте датчики. Робот-футболист будет использовать датчики для определения положения мяча и других объектов на поле. Приложите и настройте соответствующие датчики на роботе, следуя инструкциям в наборе.
Шаг 4: Программируйте робота. Используя ПО LEGO Mindstorms EV3, создайте программу для управления роботом. Включите команды для определения местоположения мяча и перемещения робота к нему, а также для забивания головы.
Шаг 5: Настройте и отладьте программу. Соедините робота с компьютером и перенесите программу на Smart Brick. Проверьте работу робота, проведя его на поле и проверив его способность определять мяч и принимать решения.
Шаг 6: Усовершенствуйте своего робота. Продолжайте экспериментировать с программой и роботом, чтобы улучшить его способность играть в футбол. Вы можете изменять алгоритмы, добавлять новые функции и экспериментировать с механикой для достижения лучших результатов.
Теперь у вас есть пошаговая инструкция о том, как создать робота футболиста EV3. Постарайтесь быть творческими и внести свои уникальные изменения в проект, чтобы сделать его еще увлекательнее!
Сборка конструктора Lego Mindstorms EV3
Сборка робота футболиста EV3 начинается с распаковки и сортировки всех деталей по типу и функциональному назначению. Убедитесь, что вам доступны все необходимые компоненты перед началом сборки.
1. Начните с сборки основы робота, также известной как база. Поместите двигатели на специально предназначенные места и закрепите их с помощью соответствующих крепежных элементов.
2. После того, как основа собрана, приступите к установке датчиков на робота. Обычно для роботов-футболистов используются ультразвуковые датчики, которые помогают роботу определить расстояние до препятствий. Установите датчики на нужной высоте и закрепите их в соответствующих отверстиях на базе робота.
3. Приступите к установке колес и передач на робота. Убедитесь, что колеса правильно смонтированы и свободно вращаются. Затем присоедините передачи к двигателям и проверьте, что они работают без проблем.
4. Далее, соедините и запрограммируйте мозг робота EV3. Мозг — это центральный блок управления роботом, который принимает команды и передает их на двигатели и датчики. Подключите мозг к базе робота и проверьте его работоспособность.
5. После того, как ваш робот собран и проведены все необходимые проверки, приступите к программированию его поведения на языке программирования, поддерживаемом EV3. Создайте программу, которая будет управлять движением робота, его реакцией на препятствия и его игровой тактикой.
6. В завершение, протестируйте вашего робота на игровом поле и внесите необходимые корректировки в его программу и механизмы, чтобы достичь наилучших результатов на поле.
Собрав робота футболиста EV3 и правильно его программировав, вы сможете создать уникального и интересного соперника или партнера для игры в футбол!
Программирование робота футболиста EV3
Для того чтобы робот футболист EV3 мог играть в футбол, необходимо написать соответствующую программу. У робота EV3 есть специальное программное обеспечение, которое позволяет его программировать.
Программирование робота EV3 включает в себя создание блок-схемы действий, которые должен выполнять робот во время игры в футбол. Эти действия включают передвижение, подачу мяча, защиту ворот и т.д.
Для программирования робота на EV3 необходимо использовать специальное программное обеспечение, например, LEGO MINDSTORMS EV3 Software. С помощью этого программного обеспечения можно создавать программы визуально, перетаскивая и соединяя блоки с различными действиями.
Программируя робота футболиста EV3, нужно учесть его аппаратные возможности, такие как двигатели и сенсоры. Например, можно использовать двигатели для передвижения робота по полю, а сенсоры для определения положения мяча и других объектов.
Для реализации логики игры можно использовать условия и циклы. Например, можно написать условие, при котором робот будет бить мяч, если он находится вблизи ворот противника. Или можно обрабатывать события, например, прослушивать сигналы от сенсоров и реагировать на них соответствующим образом.
После написания программы, ее необходимо загрузить на робота EV3 и запустить. Робот начнет выполнять инструкции, заданные в программе, и сможет сыграть в футбол.
Программирование робота футболиста EV3 является увлекательным и интересным процессом. Это позволяет развить навыки программирования, а также попрактиковаться в решении логических задач. Кроме того, программирование робота футболиста EV3 может стимулировать учеников к активной физической активности и развитию командной работы.
Установка программного обеспечения
Перед тем, как приступить к созданию робота-футболиста EV3, необходимо установить несколько программных компонентов. Вот пошаговая инструкция по установке необходимого программного обеспечения:
| Шаг 1: | Скачайте и установите LEGO MINDSTORMS EV3 Home Edition. Вы можете найти официальный сайт Lego, где доступна эта программа, и следовать инструкциям для его установки. |
| Шаг 2: | Подключите ваш робот EV3 к компьютеру с помощью USB-кабеля и включите его. |
| Шаг 3: | Запустите LEGO MINDSTORMS EV3 Home Edition и выберите опцию «Создать новый проект». |
| Шаг 4: | Выберите тип модели вашего робота. Если вы создаете футбольного робота EV3, выберите модель «Гуманоид». |
| Шаг 5: | Следуйте инструкциям по настройке модели вашего робота EV3. Это включает в себя установку сервоприводов, соединение датчиков и так далее. |
| Шаг 6: | После настройки модели, вы можете приступить к программированию робота с помощью блок-схем программирования, доступных в LEGO MINDSTORMS EV3 Home Edition. |
После завершения установки программного обеспечения вы будете готовы к созданию и программированию вашего робота-футболиста EV3. Приятного творчества!
-
Описание
-
Отзывы (0)
Описание
футболист Lego EV3 инструкция по сборке
Отзывы
Отзывов пока нет.
Будьте первым, кто оставил отзыв на “футболист Lego EV3 инструкция по сборке”
Ваш адрес email не будет опубликован.
Ваша оценка *
Ваш отзыв *
Имя *
Email *
Сохранить моё имя, email и адрес сайта в этом браузере для последующих моих комментариев.
Методическая копилка
-
Макеты полигонов и регламенты соревнований
-
Инструкции по сборке роботов
-
Учебные пособия
Инструкции по сборке роботов
VEX IQ
LEGO EV3
LEGO SPIKE PRIME
WEDO 2.0
WEDO 1.0
Роботы VEX IQ

Allie

ARMBOT
CLAWBOT

clutch

flex-up

IKE

LINQ

Slick

stretch

v-rex

Segway IQ
РОБОт-ФУТБОЛИСТ
Роботы Lego Mindstorms EV3
каретка с двумя датчиками цвета
РОбот-Educator от LEGO

каретка «пятиминутка»
Универсальная каретка
Пистолет EV3
Обработка видео…
г. Нижний Новгород ул.Генкиной, д.84а
+7 906 36 777 36
ПН — СБ с 9-00 до 18-00
Роботы-футболисты, осуществляющие безупречные пасы, точные удары и грамотное взаимодействие с командой, — это круто. Они находятся на переднем крае современных технологий и являются воплощением слияния механики, электроники и программирования. Если вы заинтересованы в создании своего робота-футболиста, то эта подробная инструкция поможет вам воплотить ваши идеи в реальность.
Для создания робота-футболиста нам понадобится LEGO Mindstorms EV3 — набор робототехнических конструкторов, который замечательно подходит для создания интересных и функциональных моделей. В наборе EV3 вы найдете все необходимые детали, моторы, датчики и программируемый блок управления.
Важным этапом создания робота-футболиста является программирование. EV3 работает на специальной программе, называемой EV3 Programmer, которая позволяет создавать программы для робота-футболиста. Вы можете использовать готовые блоки или создавать свои собственные программы на языке программирования Scratch.
В этой подробной инструкции мы рассмотрим все шаги создания робота-футболиста EV3: от сборки конструкции и подключения моторов и датчиков, до программирования и настройки его функций. Вы узнаете, как настроить робота-футболиста для управления с пульта дистанционного управления или для работы в автономном режиме. Готовы начать? Погнали!
Содержание
- Инструкция по созданию робота-футболиста EV3
- Шаг 1: Сборка робота
- Шаг 2: Подключение EV3
- Шаг 3: Программирование EV3
- Шаг 4: Тренировка робота
- Шаг 5: Участие в соревнованиях
- Выбор и подготовка комплектующих
- Сборка основной конструкции
- Установка и настройка программного обеспечения
- Тестирование и настройка робота
Инструкция по созданию робота-футболиста EV3
В этой инструкции будет рассказано, как создать робота-футболиста EV3. Эта информация будет полезна тем, кто хочет собрать своего собственного робота-футболиста и освоить основы программирования EV3.
Шаг 1: Сборка робота
Первым шагом является сборка робота с помощью набора LEGO Mindstorms EV3. Инструкции по сборке можно найти в упаковке набора или загрузить с официального веб-сайта LEGO. При сборке робота следует следовать инструкциям и убедиться, что все детали правильно закреплены.
Шаг 2: Подключение EV3
После сборки робота необходимо подключить самблок EV3 к роботу. EV3 является главным мозгом робота и отвечает за его функционирование. Подключение EV3 обычно производится с помощью кабелей, которые идут в комплекте с набором.
Шаг 3: Программирование EV3
После того, как робот собран и EV3 подключен, необходимо запрограммировать его для игры в футбол. Для программирования EV3 можно использовать специальное программное обеспечение, такое как LEGO Mindstorms EV3 или другие среды разработки поддерживающие EV3. С помощью программного обеспечения можно создавать различные команды и задачи для робота, чтобы он мог двигаться, кикать мяч и выполнять другие действия, необходимые для игры в футбол.
Шаг 4: Тренировка робота
После того, как робот сконструирован и запрограммирован, необходимо провести тренировки. Во время тренировок можно научить робота различным футбольным стратегиям, таким как передачи, удары по воротам и защита. Постепенно улучшайте навыки своего робота и настраивайте его программное обеспечение для оптимальной игры в футбол.
Шаг 5: Участие в соревнованиях
Когда ваш робот-футболист достигнет определенного уровня мастерства, вы можете принять участие в соревнованиях с другими роботами. Зарегистрируйтесь на местных соревнованиях по робототехнике или футболу и покажите свою команду и навыки управления роботом. Участие в соревнованиях поможет вам улучшить навыки, получить опыт и показать свой талант в области создания роботов-футболистов.
| Шаг | Описание |
|---|---|
| 1 | Сборка робота с помощью набора LEGO Mindstorms EV3 |
| 2 | Подключение EV3 к роботу |
| 3 | Программирование EV3 для игры в футбол |
| 4 | Тренировка робота по футбольным стратегиям |
| 5 | Участие в соревнованиях с другими роботами |
Выбор и подготовка комплектующих
Для создания робота-футболиста EV3 вам понадобятся следующие комплектующие:
- Конструктор Lego Mindstorms EV3: это основа для вашего робота. Он содержит все необходимые детали и детали, чтобы вы могли создать своего робота-футболиста.
- Моторы EV3: вы можете использовать два или три мотора EV3. Они отвечают за движение робота и управление мячом. Убедитесь, что моторы работают исправно и подключены к основному блоку.
- ИК-датчик препятствий: это датчик, который поможет вашему роботу избегать препятствий на поле. Монтируйте его так, чтобы он был направлен вперед.
- Цветовой сенсор: этот сенсор позволяет роботу определить цвет мяча. Он должен быть правильно откалиброван, чтобы точно определять цвет.
- Камера: вы также можете добавить камеру к вашему роботу для обнаружения объектов на поле. Камера может быть установлена на основной блок или на робота.
Перед началом работы убедитесь, что все комплектующие в полной комплектации, не повреждены и готовы к использованию. Если что-то отсутствует или повреждено, свяжитесь с производителем для получения замены. Отлично, теперь вы готовы приступить к сборке и программированию робота-футболиста EV3!
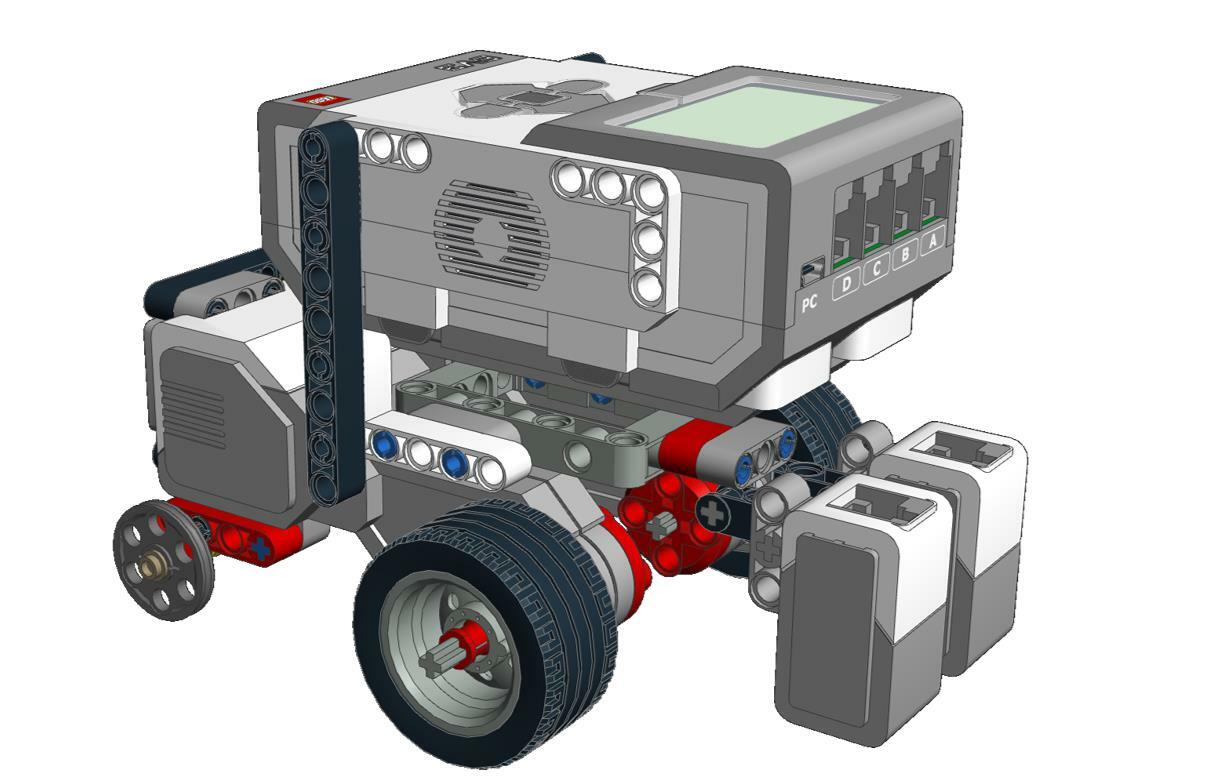
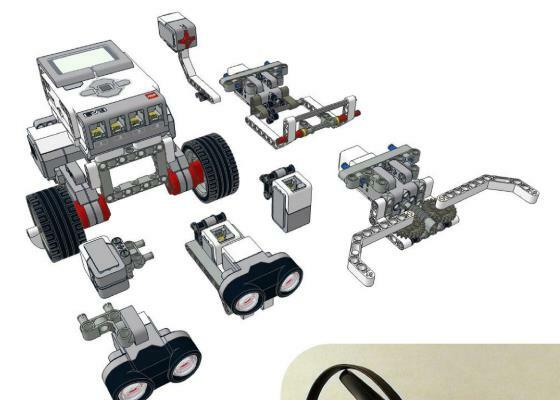
Сборка основной конструкции
Для создания робота-футболиста EV3 необходимо провести сборку основной конструкции. Вам понадобятся следующие детали:
- EV3 Intelligent Brick
- 2 Large Motors
- Medium Motor
- Редуктор (3×3 frame)
- 2 Drive Wheels
- Ball Caster Wheel
- Металлический скошенный штырь
- Разные соединительные детали (балки, пина, штифты)
Следующим шагом будет сборка основной рамы. Она состоит из двух балок, соединенных пинами, и будет служить основой для установки электронных компонентов.
После этого следует собрать шасси робота. Прикрепите стаканчик для шарика к металлическому скошенному штырю и соедините его с редуктором с помощью пина и штифта.
Затем необходимо установить два больших мотора. Они должны быть закреплены на основной раме и присоединены к редуктору.
Последним шагом сборки основной конструкции является установка малого мотора. Он должен быть прикреплен к основной раме и соединен с редуктором.
Установка и настройка программного обеспечения
Перед тем, как приступить к созданию робота-футболиста EV3, необходимо установить и настроить несколько программных компонентов.
- Скачайте и установите среду разработки LEGO MINDSTORMS EV3. Это интуитивно понятное программное обеспечение позволяет создавать и программировать роботов EV3.
- Запустите среду разработки EV3 и подключите ваш блок управления EV3 к компьютеру с помощью USB-кабеля.
- Убедитесь, что ваш блок управления EV3 подключен к компьютеру и правильно распознается средой разработки EV3. Для этого откройте в среде EV3 блок управления и убедитесь, что он отображается и готов к использованию.
- Проверьте, что у вас установлены все необходимые драйверы и обновления для работы с роботом EV3. Вы можете найти последние версии драйверов и обновлений на официальном сайте LEGO.
- Установите дополнительное программное обеспечение, если оно требуется для создания и программирования вашего робота-футболиста EV3. Например, вы можете использовать дополнительные библиотеки или расширения для более сложных задач и функций.
- Настройте ваше программное обеспечение для работы с роботом EV3. Это может включать в себя установку и настройку дополнительных компонентов, настройку соединения с блоком управления и выбор базовых настроек для программирования.
После выполнения всех этих шагов вы готовы к созданию своего робота-футболиста EV3 и программированию его для участия в футбольных матчах.
Тестирование и настройка робота
После того как вы успешно собрали робота-футболиста EV3, настало время приступить к его тестированию и настройке. Важно убедиться, что робот правильно выполняет все необходимые действия на футбольном поле.
Перед началом тестирования убедитесь, что ваш робот полностью заряжен и все компоненты правильно подключены. Затем загрузите программу управления на робота и запустите ее. Обратите внимание на то, как робот реагирует на команды и перемещается по полю.
Во время тестирования обратите внимание на следующие пункты:
1. Движение робота: убедитесь, что робот может свободно двигаться по полю. Он должен легко поворачиваться и передвигаться вперед и назад.
2. Управление мячом: проверьте, как робот взаимодействует с мячом. Он должен уметь подбирать мяч, ударять по нему и передавать его другому роботу.
3. Распознавание окружающей среды: убедитесь, что робот способен распознавать местоположение других роботов, ворот и препятствий на поле. Это позволит ему принимать правильные решения во время игры.
4. Коммуникация с другими роботами: проверьте, что ваш робот может связываться с другими роботами на поле. Он должен быть способен передавать им информацию и согласовывать действия.
В процессе тестирования вы можете обнаружить некоторые недостатки или проблемы. В этом случае внесите необходимые изменения в программу управления или механизмы робота. После внесения изменений повторите тестирование, чтобы убедиться, что проблемы были исправлены. Не забывайте, что тестирование и настройка робота — это непрерывный процесс, который требует терпения и тщательной работы.
В самом конце тестирования убедитесь, что ваш робот готов к игре и способен эффективно выполнять все задачи на футбольном поле. Правильная настройка и тестирование помогут вам достичь успеха и победы!
Давненько не было вестей от нашей команды. Вы думаете что мы забросили роботов? Не дождетесь!) С середины января находимся в режиме планомерной подготовки к ВРО, снова готовимся к футболу роботов. В этом году алгоритмы машин снова переписаны заново и во многом не повторяют логику работы наших футболистов предыдущих поколений.

Учебный процесс тоже не стоял на месте, в нашей копилке теперь вот такой крупнокалиберный арсенал: «Введение в программирование (C++)» от Академии Яндекса, «Программирование на Python», «Python: основы и применение», «Введение в Linux» от Института биоинформатики, «Введение в архитектуру ЭВМ. Элементы операционных систем» от Computer Science Center.

При подготовке к соревнованиям по футболу роботов не всегда есть с кем поиграть. Часто бывает так, что оборудования для еще одной команды не хватает или те, кто смог бы с вами сыграть, в этот раз никак не могут поучаствовать. В такой ситуации нас выручают управляемые роботы-оппоненты.
Поиграть против своей автономной команды очень интересно и полезно:
- Зная слабые места своих автономных роботов можно создавать на поле такие игровые ситуации, в которых они проявятся. Это важно для отладки алгоритмов и конструкций.
- Управляя роботом ты моделируешь в голове работу некого алгоритма, который затем может быть перенесен в программу автономного игрока
- Это реальный драйв — ты играешь в игру не на экране, а в реальном мире, с полноценной физикой и красивыми текстурами. Обзор 360 градусов и высокое разрешение!

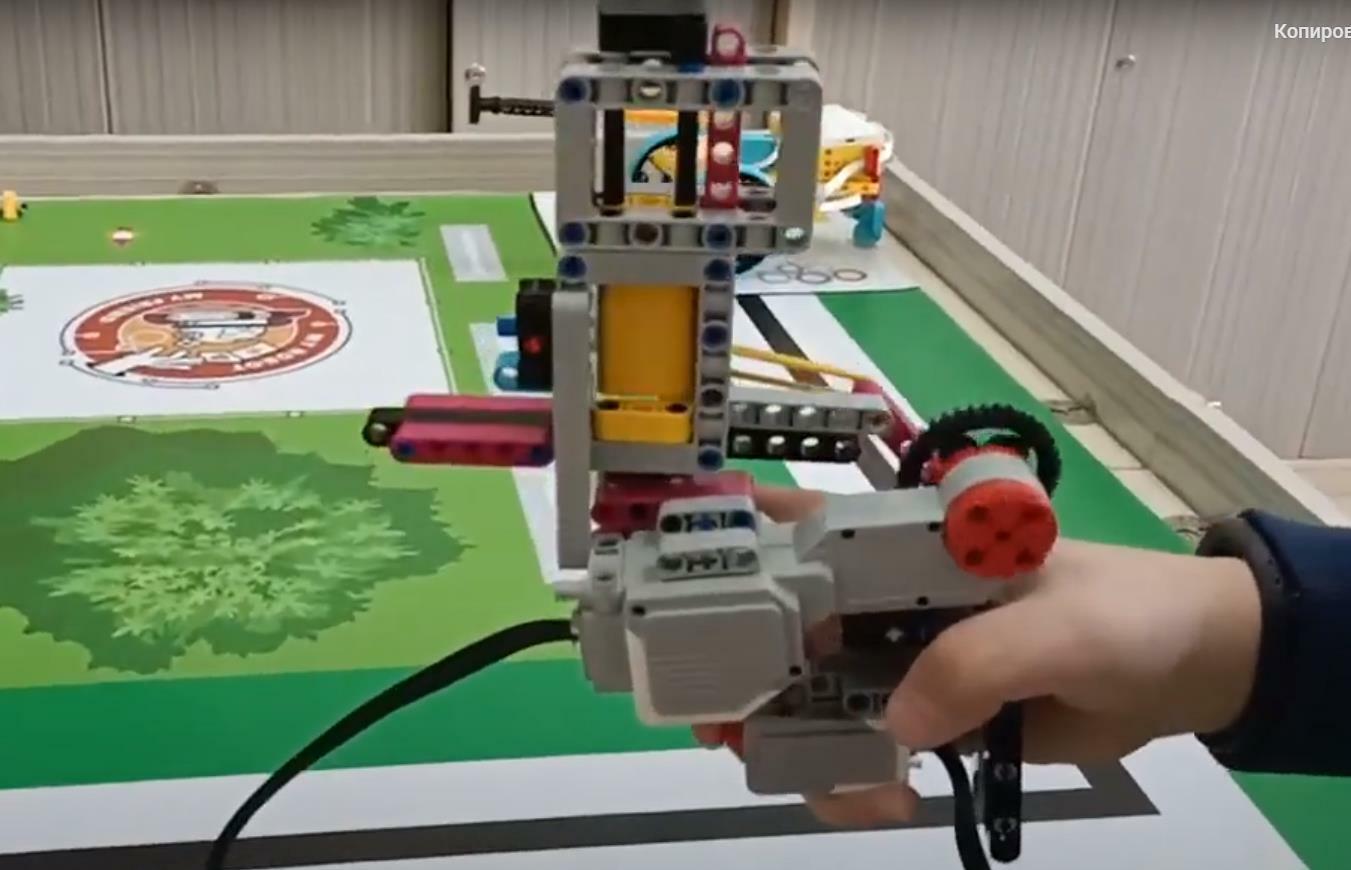
Так как мы находимся в процессе изучения языка Python, то интересной учебной задачей стала реализация такого управляемого робота-оппонента на базе ev3dev. Можно конечно «не заморачиваться» и использовать смартфон и написанное кем-то приложение, но это не наш путь. На борту у EV3 есть Bluetooth, у китайцев на Aliexpress — дешевые блютузные джойстики — почему бы не поуправлять роботом с реальных кнопок и стика? Используя стандартное ПО LEGO EV3 такую связку заставить работать невозможно, ev3dev открывает перед нами такую возможность.

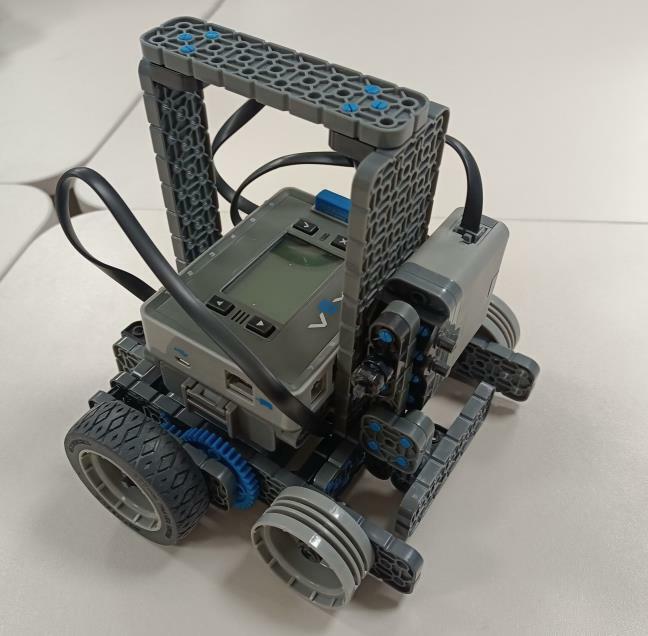
Для начала сам робот. Традиционно подготовили инструкцию по сборке в Lego Digital Designer, скачать можно по ссылке. В конструкции умышленно не использовали механизм удара по мячу, чтобы у начинающих не было соблазна собрать на базе этой инструкции автономного робота.

Чтобы джойстик заработал с EV3, необходимо «спарить» устройства привычным образом, после чего в /dev/input должен появиться новый девайс:
robot@ev3dev:~$ ls /dev/input
by-path event0 event1 event2
Кроме Bluetooth-джойстика можно использовать беспроводной USB-джойстик, воткнув его USB-приемник в соответствующий порт на роботе. Беспроводная клавиатура с интерфейсом USB или Bluetooth тоже подойдет. Технически роботом можно управлять используя даже беспроводную мышку, но это вероятно не особенно удобно. Главное условие — после подключения устройства оно должно появляться в устройствах ввода, в /dev/input
Для получения данных с HID-устройств мы использовали стандартный модуль Python evdev. Ничего доустанавливать в ev3dev не требуется.
Нашу программу для робота можно скачать по ссылке. Основная фишка управления по сравнению со «смартфонным» — реализация плавного разгона и торможения, что обеспечивает комфортное управление. Выглядит программа следующим образом:
#!/usr/bin/env python3
# Подключаем модуль для управления EV3
from ev3dev.ev3 import *
# Подключаем модуль для чтения данных с HID-устройств
import evdev
# Создаем объект device, измените на ваш /dev/input/event2
device = evdev.InputDevice(‘/dev/input/event2’)
StatusGo = 0
StatusLR = 0
# Целевая скорость, робот наберет ее когда разгонится
speed = 100
# Реальная скорость, с нее робот стартует
real_speedB = 0
real_speedC = 0
speedB = 0
speedC = 0
# Признак зарершения программы (нажат акнопка Start на джойстике)
STOP = False
# Создаем объекты — моторы B и C
B = LargeMotor(‘outB’)
C = LargeMotor(‘outC’)
# Цикл пока не нажата кнопка Start на джойстике
while not STOP:
# Читаем список событий с джойстика
gen = device.read()
try:
# Для всех событий в списке
for event in gen:
# Выделяем те, которые возникли при нажатиях кнопок
if event.type == evdev.ecodes.EV_KEY:
# преобразуем такие события в строку myStr
myStr = str(event)
# если отпущена кнопка «Влево»
if myStr.find(«code 168, type 01, val 00») >= 0:
StatusLR = 0
# если нажата кнопка «Влево»
if myStr.find(«code 168, type 01, val 01») >= 0:
StatusLR = -1
# если удерживается кнопка «Влево»
if myStr.find(«code 168, type 01, val 02») >= 0:
StatusLR = -2
# если отпущена кнопка «Вправо»
if myStr.find(«code 208, type 01, val 00») >= 0:
StatusLR = 0
# если нажата кнопка «Вправо»
if myStr.find(«code 208, type 01, val 01») >= 0:
StatusLR = 1
# если удерживается кнопка «Вправо»
if myStr.find(«code 208, type 01, val 02») >= 0:
StatusLR = 2
# если отпущена кнопка «Вперед»
if myStr.find(«code 172, type 01, val 00») >= 0:
StatusGo = 0
# если нажата кнопка «Вперед»
if myStr.find(«code 172, type 01, val 01») >= 0:
StatusGo = speed*0.75
# если удерживается кнопка «Вперед»
if myStr.find(«code 172, type 01, val 02») >= 0:
StatusGo = speed
# если отпущена кнопка «Назад»
if myStr.find(«code 114, type 01, val 00») >= 0:
StatusGo = 0
# если нажата кнопка «Назад»
if myStr.find(«code 114, type 01, val 01») >= 0:
StatusGo = -1*(speed * 0.75)
# если удерживается кнопка «Назад»
if myStr.find(«code 114, type 01, val 02») >= 0:
#print («GO BREAK»)
StatusGo = -1*speed
# если нажата кнопка «Start»
if myStr.find(«code 164, type 01, val 02») >= 0:
print («BREAK! STOP PROGRAMM»)
STOP = True
# Кнопка — среднее значение скорости
if myStr.find(«code 164, type 01, val 01») >= 0:
speed = 75
# Кнопка нажата — уменьшить скорость
if myStr.find(«code 115, type 01, val 01») >= 0:
speed = speed — 5
if(speed < 5):
speed = 5
# Кнопка удерживается — уменьшить скорость
if myStr.find(«code 115, type 01, val 02») >= 0:
speed = speed — 1
if(speed < 5):
speed = 5
# Кнопка нажата — увеличить скорость
if myStr.find(«code 113, type 01, val 01») >= 0:
speed = speed + 5
if(speed > 100):
speed = 100
# Кнопка удерживается — увеличить скорость
if myStr.find(«code 113, type 01, val 02») >= 0:
speed = speed + 1
if(speed > 100):
speed = 100
except IOError:
pass
# перебрасываем статусы нажатий в мощности моторов
speedB = StatusGo
speedC = StatusGo
# Поворот влево
if(StatusLR < 0):
speedB = speedB-(25*abs(StatusLR))
speedC = speedC+(25*abs(StatusLR))
# поворот вправо
if(StatusLR > 0):
speedC = speedC-(25*StatusLR)
speedB = speedB+(25*StatusLR)
# ограничение скорости
if(speedB > 100):
speedB = 100
if(speedC > 100):
speedC = 100
if(speedB < -100):
speedB = -100
if(speedC < -100):
speedC = -100
# плавный разгон и торможение
if(abs(speedB) > 5 and abs(speedC) > 5):
real_speedB = real_speedB*0.95 + speedB*0.05
real_speedC = real_speedC*0.95 + speedC*0.05
if(speedB == 0 and speedC == 0):
real_speedB = real_speedB*0.95
real_speedC = real_speedC*0.95
if(speedB == 0 and abs(real_speedB) < 5):
real_speedB = 0
if(speedC == 0 and abs(real_speedC) < 5):
real_speedC = 0
# подаем рассчитанные мощности на моторы
B.run_forever(speed_sp=real_speedB*9)
C.run_forever(speed_sp=real_speedC*9)
# останавливаем моторы после вылета из цикла
B.stop(stop_action=»hold»)
C.stop(stop_action=»hold»)
# сигнал завершения программы
Sound.beep()
![]()
Проектная деятельность
Войти
TLNaibov
инструкция по сборке робота-футболиста
https://education.lego.com/ru-ru/support/mindstorms-ev3/building-instruc…
Источник информации относится к проекту:
Робофутбол
- Войдите, чтобы оставлять комментарии
107061, Москва, ул 2-Пугачевская, 6А
+7 (495) 963-76-77
Обратная связь