
Время на прочтение
10 мин
Количество просмотров 95K
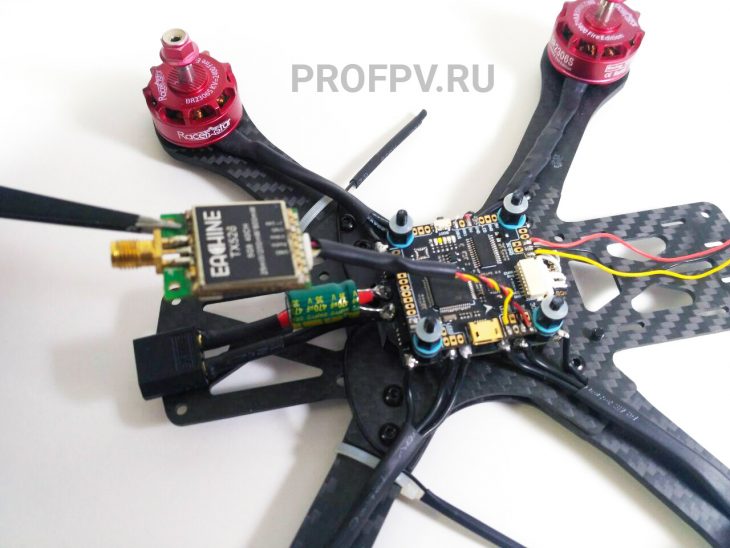
Сегодня популярность гонок на дронах стремительно растёт. Любительские полетушки перерастают в серьёзные международные соревнования, а количество людей, вовлечённых в это хобби, растёт в прогрессии. Я сам недавно собрал FPV-квадрокоптер 180-го размера (расстояние в мм между осями моторов по диагонали) и спешу поделиться этим опытом.

Полностью процесс сборки и настройки я описал тут и тут, а ниже будет немного изменённая версия, содержащая больше информации из моих предыдущих статей.
Я оставлю за скобками вопрос вхождения в данное хобби и перейду непосредственно к квадрокоптеру.
Выбор размера квадрокоптера
Год назад наибольшей популярностью пользовались квадрокоптеры 250-го размера. Но сейчас пилоты предпочитают собирать аппараты меньшего размера, что весьма разумно: вес меньше, а мощность та же. Я выбрал 180-й размер не из каких-то практических причин, а как некий челлендж по сборке.
На самом деле, такой подход к выбору не совсем правилен. Гораздо разумнее выбирать сначала размер пропеллеров, а уже под них — наименьшую раму, куда влезут выбранные пропеллеры. И при таком подходе 180-й формат вообще отбраковывается. Судите сами: 210-й формат позволяет ставить те же 5-дюймовые пропеллеры, что 250-й, при этом сам квадрик получается легче, а 4-дюймовые пропеллеры влезают и в 160-е рамы. Получается, что 180-й размер — это такой промежуточный формат, который «ни нашим, ни вашим». Его также можно считать утяжелённым 160-м. Но, тем не менее я выбрал именно его. Возможно потому, что это минимальный размер, способный более-менее комфортно тягать камеру GoPro или Runcam.
Комплектующие
Начнём с моторов. «Промежуточность» 180-го размера, а также богатство их ассортимента, осложняют выбор. С одной стороны, можно брать то, что идёт на 160-е, с другой — то, что устанавливают на 210-е или даже 250-е. Исходить надо из пропеллеров и батареи (количество банок). Не вижу смысла использовать батарею 3S, а по пропеллерам общие правила таковы:
- нужна максимальная статическая тяга — увеличивай диаметр пропеллера и уменьшай шаг (в разумных пределах)
- нужна высокая скорость — уменьшай диаметр и увеличивай шаг (в разумных пределах)
- нужна высокая тяга при маленьком диаметре — добавляй количество лопастей (опять же в разумных пределах, так как если разница между двух- и трёхлопастными пропеллерами ощутимая, то между трёх- и четырёхлопастными — не такая большая)
В моём случае я имею ограничение размера пропеллеров в 4 дюйма, но не имею ограничения по моторам. Значит, разумнее всего будет использовать трёхлопастные 4045 пропеллеры bullnose. Их сложно балансировать, но с ними управление отзывчевее и предсказуемее, а звук тише. С другой стороны, с двухлопастными пропеллерами скорость у квадрокоптера выше, но мне этого точно не надо. «В народе» на 180-х рамах преобладают следующие сетапы:
- лёгкий с моторами 1306-3100KV, обычными 4045 пропеллерами и батареей 850mAh
- тяжёлый и мощный под трёхлопастные bullnose пропеллеры и экшн-камеру с моторами 2205-2600KV и батареей 1300mAh
На самом же деле, рама позволяет ставить моторы от 1306-4000KV до 22XX-2700KV. Кстати, не знаю почему, но моторы 1806-2300KV сейчас в опале и мало используются.
Для своего квадрика моторы я взял — RCX H2205 2633KV. Во-первых, хотелось иметь запас по мощности (хотя с моими скромными навыками пилотирования, непонятно зачем). Во-вторых, мои сетапы никогда не получались сверхлёгкими, вдобавок я ещё и экшн-камеру таскать планирую. Конкретно моторы RCX — вариант компромиссный. Они дёшевы, но и нареканий по качеству много. На момент покупки комплектующих это были одни из немногих моторов 2205-2600KV на рынке. Сейчас (на момент написания статьи) ассортимент значительно больше и лучше выбрать что-нибудь другое.
С остальными комплектующими действовал по принципу «больше челленджа»:
- Рама RC180 V2. Недорогая (брендовые аналоги в 2-3 раза дороже), лёгкая, с хорошей компановкой и нижней пластиной 3мм. К сожалению, отдельно запчастей к ней не купить, но, учитывая цену всей рамы, вполне можно купить 1-2 комплекта на запчасти.
- Приёмник FrSky D4R-II. Поначалу хотелось попробовать FrSky X4R-SB, но в этом случае пришлось бы менять модуль на передатчике, а этого делать совсем не хотелось. Забегая вперёд скажу, что разумнее брать версию приёмника без припаянных разъёмов. У себя я всё равно их отпаял.
- Регуляторы FVT LittleBee 20A — недорогие и проверенные, но сейчас уже устаревшие. Когда я их покупал только-только появились в продаже FVT LittleBee 20A PRO на чипе Silabs F396 (та версия, что у меня использует чип Silabs F330), а на момент написания статьи уже принимались предзаказы на FVT LittleBee 20A-S, заточенные под BLHeli_S. Здесь можно почитать о технических стороне регуляторов LittleBee 20A.
- Видеопередатчик Foxeer FX799T — компактный, популярный и с микрофоном.
- Камера Sony Super HAD CCD 600TVL (IR Block, NTSC, объектив 2.8). Можно было и Foxeer XAT600M, но мне нужна без корпуса.
- Держатель камеры Diatone.
- Антенна-«клевер» BeeRotor и кабель-удлинитель.
- MICRO MinimOSD.
- В комплекте с рамой уже есть плата распределения питания, но я не хочу её использовать. Поэтому заказал Matek Mini Power Hub, она намного удобнее. Кстати, при использовании батарей 3S, эта PBD издаёт громкий свист и это никак не лечится.
- Несколько батарей Turnigy nano-tech 1300mAh 4S 45~90C.
- Подсветка с пищалкой ZG 12Bit WS2812B LED Board. Позднее выяснилось, что пищалка либо не работает, либо есть какие-то неизвестные (никакой документации не прилагалось) нюансы в подключении. В итоге поставил другую.
- Несколько комплектов пропеллеров DYS 3-blade 4040 Bullnose.
Выбор полётного контроллера
Вы наверное заметили, что в списке нет полётного контроллера. Хочу описать его выбор подробнее. В недорогие наборы для сборки часто включают контроллер CC3D, так сейчас это, пожалуй, самый дешёвый ПК. Сегодня нет совершенно никакого смысла покупать CC3D. Он устарел и не имеет таких необходимых вещей, как контроль заряда батареи и «пищалка». Его преемник CC3D Revolution — это уже совсем иной продукт с богатыми возможностями, но и ценой свыше 40€.
Современные полётные контроллеры уже перешли с процессоров F1 на F3, что сделало Naze32 ПК прошлого поколения и ощутимо снизило его цену. Сейчас это поистине народный контроллер, который имеет почти всё, что душа желает при цене от 12€.
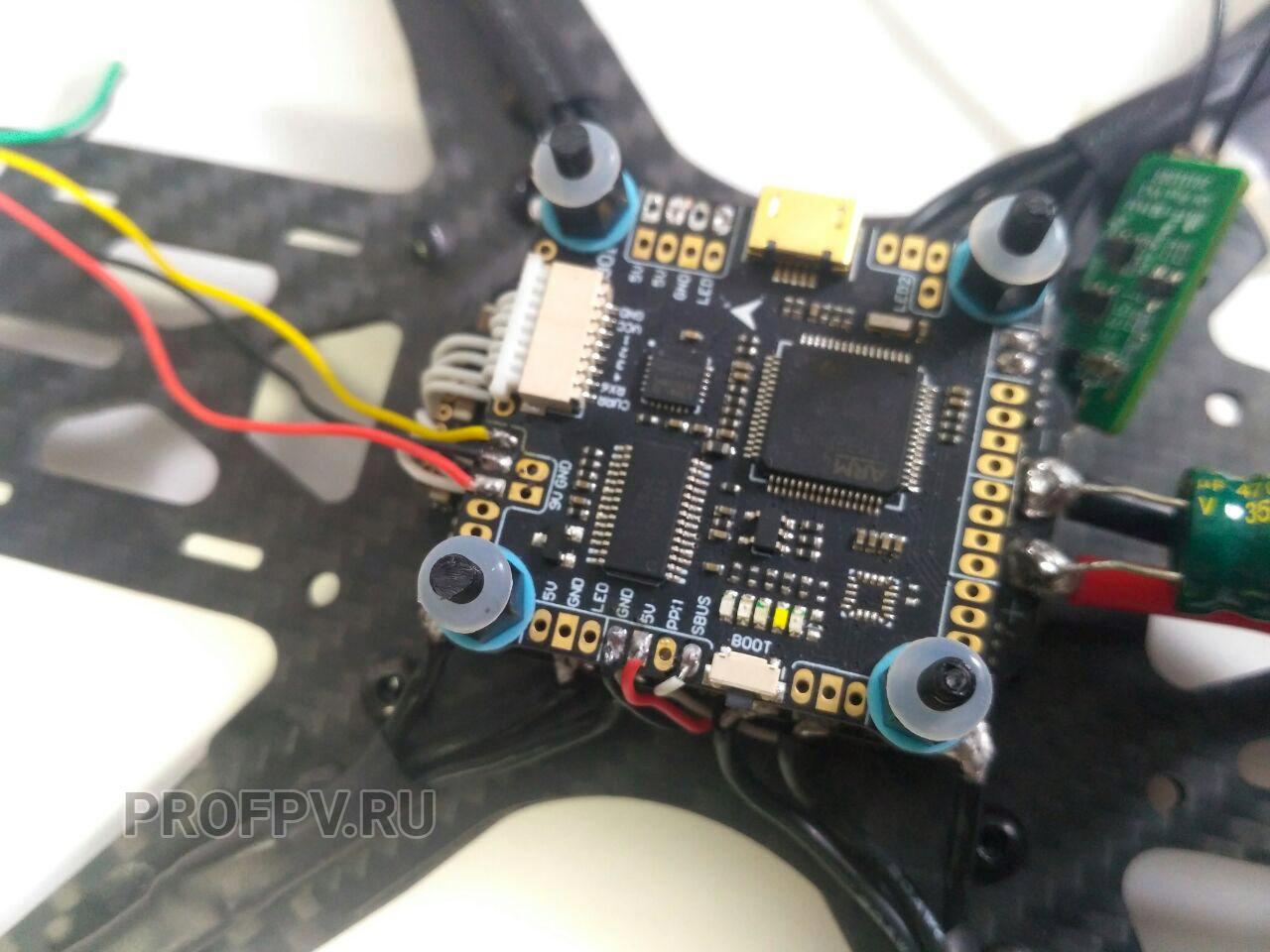
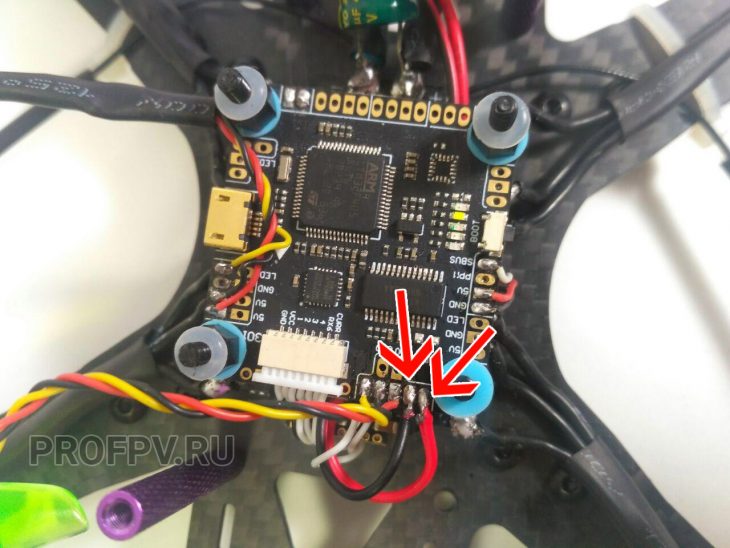
Из ПК нового поколения наиболее популярен Seriously Pro Racing F3, причём в первую очередь, из-за наличия недорогих клонов. Сам контроллер ничем не уступает Naze32, вдобавок имеет быстрый процессор F3, большое количество памяти, три UART-порта, встроенный инвертор для S.Bus. Именно SPRacingF3 Acro я и выбрал. Остальные современные ПК не рассматривались из-за цены, либо каких-то специфических особенностей (закрытая прошивка, компоновка и т.д.)
Отдельно отмечу модную ныне тенденцию объединять несколько плат в одну. Чаще всего ПК и OSD или ПК и PDB Я не поддерживаю данную идею за парой исключений. Мне не хочется менять весь полётный контроллер из-за сгоревшей OSD. К тому же, как показывает практика, иногда такое объединение приносит проблемы.
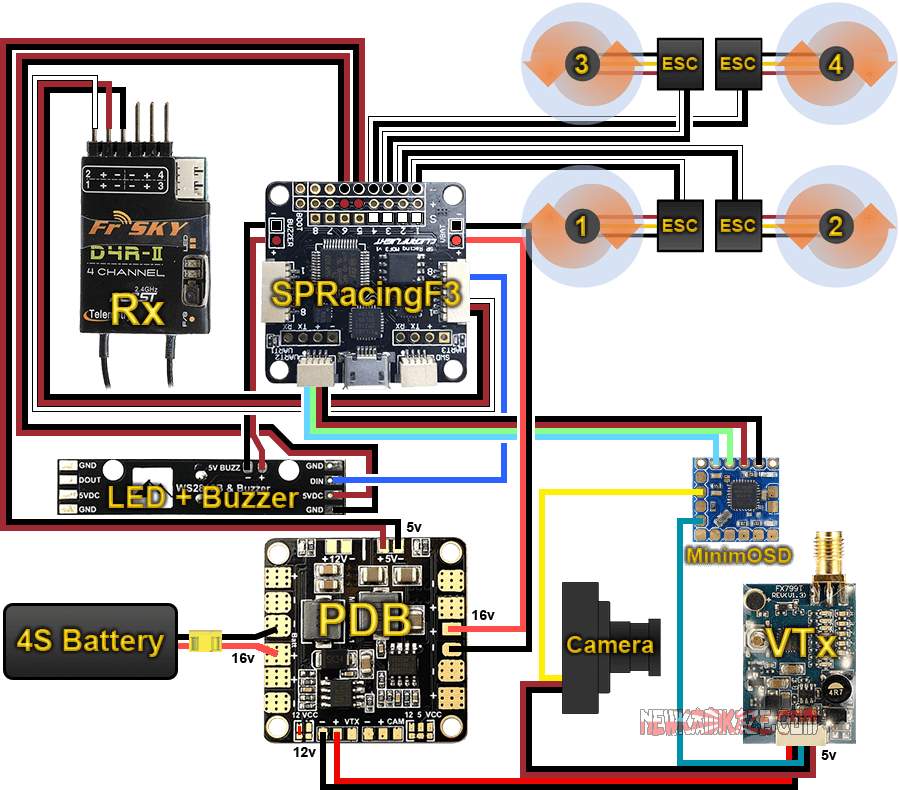
Схема проводки
Понятное дело, что все компоненты, которым нужно питание 5В или 12В, будут получать его от BEC`ов платы распределения питания. Камеру теоретически можно было запитать напрямую от 4S-батареи, благо входное напряжение это позволяет, но ни в коем случае делать этого не стоит. Во-первых, все камеры очень восприимчивы к шумам в цепи от регуляторов, что выразится в помехах на картинке. Во-вторых, регуляторы с активным торможением (такие, как мои LittleBee), при активизации этого торможения, дают в бортовую сеть очень серьёзный импульс, что может сжечь камеру. Причём, наличие импульса напрямую зависит от износа батареи. У новых его нет, а у старых — есть. Вот познавательное видео на тему помех от регуляторов и чем их фильтровать. Так что камеру лучше питать либо от BEC`а, либо от видеопередатчика.
Также, ради улучшения качества картинки, рекомендуется пустить с камеры на OSD не только сигнальный провод, но и «землю». Если скрутить эти провода в «косичку», то «земля» действует, как экран для сигнального провода. Правда в данном случае я этого не делал.
Коли уж зашла речь о «земле», то часто спорят о том, надо ли подключать «землю» от регуляторов к ПК или достаточно одного сигнального провода. На обычном гоночном квадрокоптере однозначно надо подключать. Её отсутствие может привести к срывам синхронизации (подтверждение).
Конечная схема проводки получилась простой и лаконичной, но с парой нюансов:
- питание полётного контроллера (5В) от PDB через выходы для регуляторов
- питание радиоприёмника (5В) от ПК через разъём OI_1
- питание видеопередатчика (12В) от PDB
- питание камеры (5В) от видеопередатчика
- OSD подключил к UART2. Многие используют для этого UART1, но как и на Naze32, здесь этот разъём запараллелен с USB.
- Vbat подключен к ПК, а не к OSD. В теории показания вольтажа батареи (vbat) можно считывать как на OSD, так и на ПК, подключив батарею либо к одному, либо к другому. В чём разница? В первом случае показания будут присутствовать только на экране монитора или очков и ПК ничего не будет о них знать. Во втором случае ПК может отслеживать напряжение батареи, информировать о нём пилота (например, «пищалкой»), а также передавать эти данные на OSD, в «чёрный ящик» и по телеметрии на пульт. Настраивать точность показаний тоже проще через ПК. То есть, подключение vbat к полётному контроллеру намного предпочтительнее.
Сборка
Для начала несколько общих советов по сборке:
- Карбон проводит ток. Так что всё надо хорошо изолировать, чтобы нигде ничего не замыкало на раму.
- Всё, что выступает за пределы рамы, при аварии вероятнее всего, будет сломано или оторвано. В данном случае речь идёт, в первую очередь, о разъёмах. Провода тоже могут быть перерублены винтом, так что и их надо прятать.
- Крайне желательно после пайки покрыть все платы изолирующим лаком PLASTIK 71, причём в несколько слоёв. По собственному опыту скажу, что наносить жидкий лак кисточной намного удобнее, чем покрывать спреем.
- Не лишним будет капнуть немного термоклея на места пайки проводов к платам. Это защитит пайку от вибраций.
- Для всех резьбовых соединений желательно использовать «Локтайт» средней фиксации (синий).
Сборку я предпочитаю начинать с моторов и регуляторов. Здесь хорошее видео по сборке маленького квадрокоптера, с которого я перенял идею расположения проводов моторов.
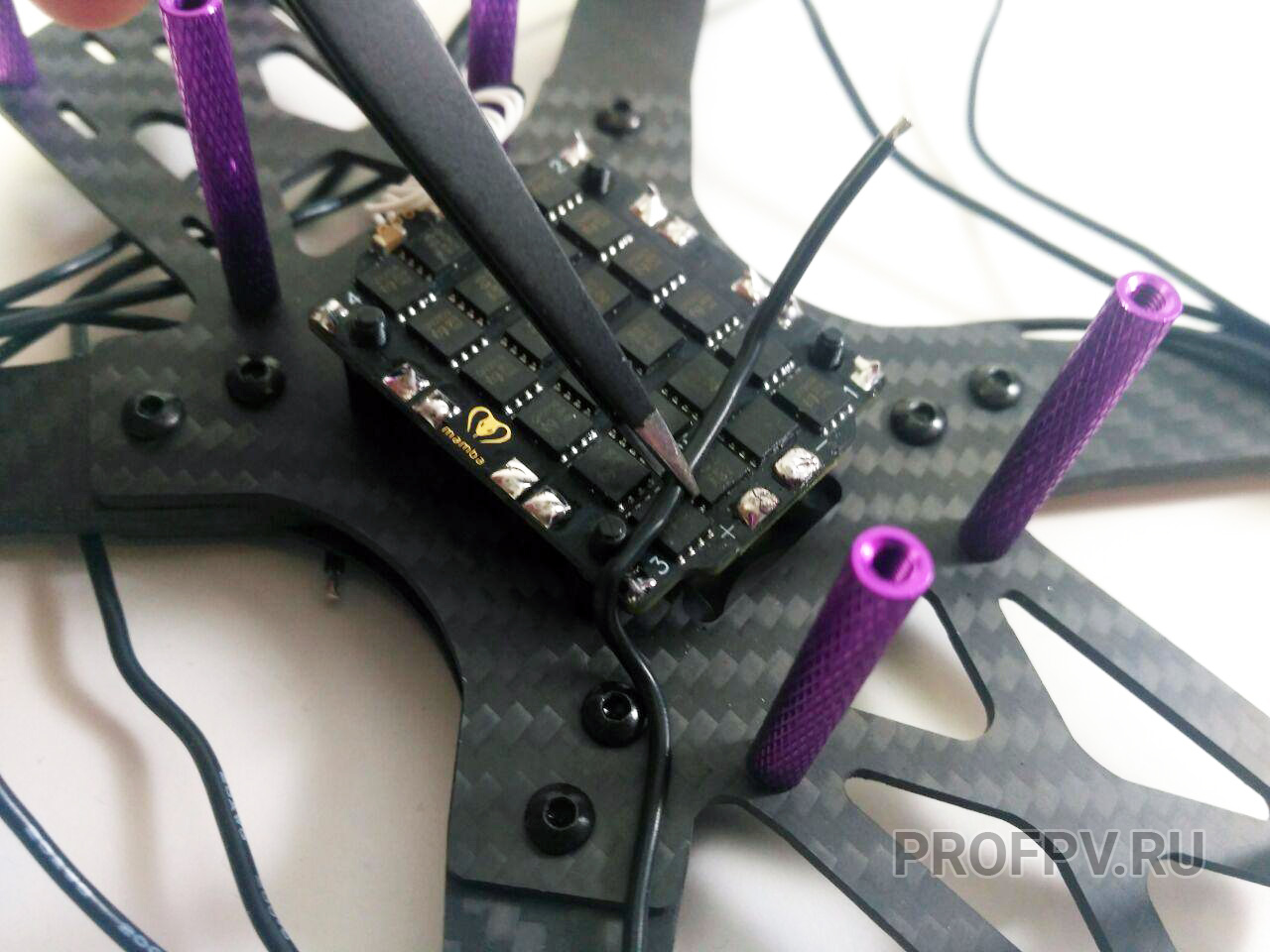
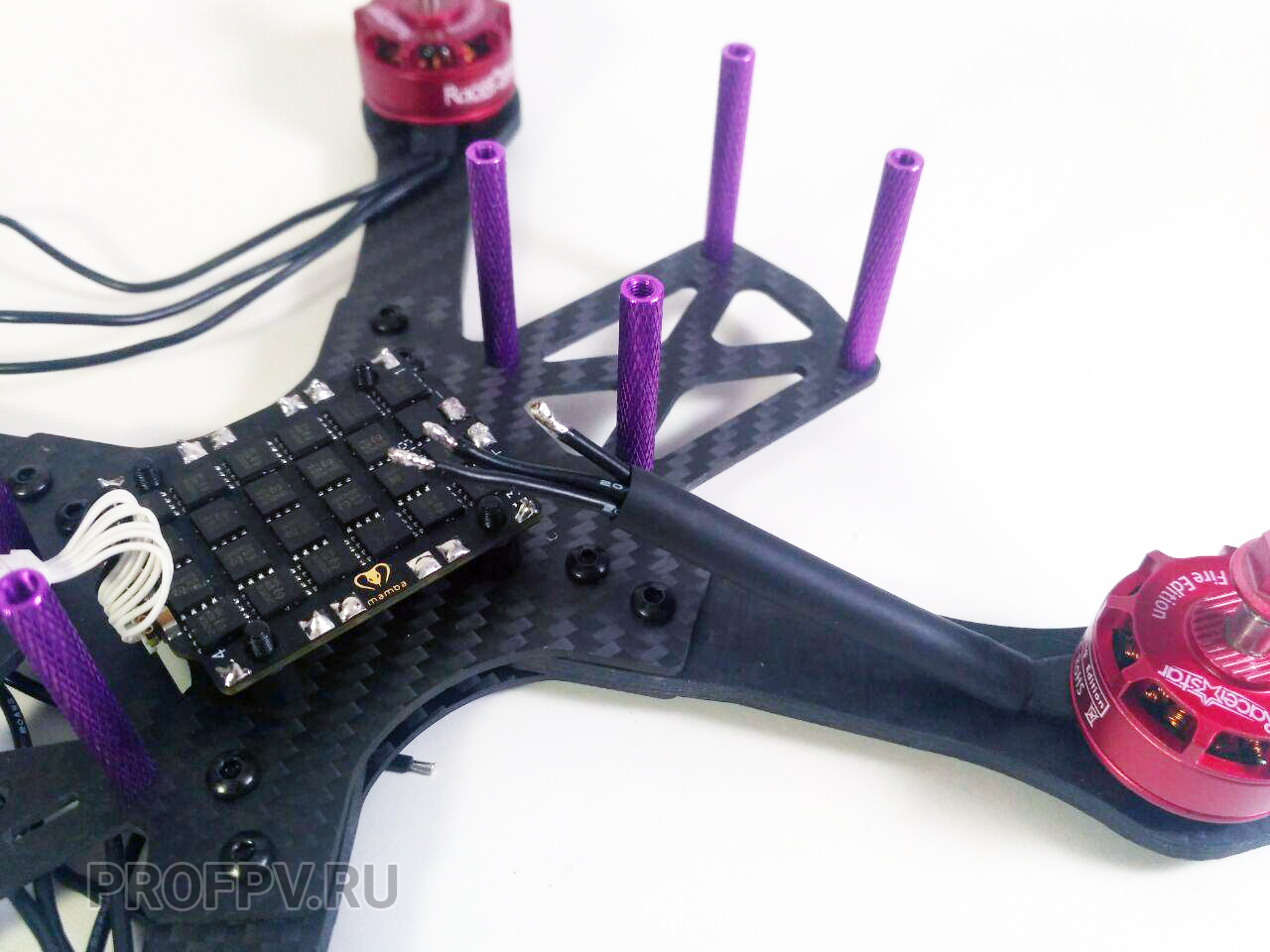
Отдельно хочется сказать про крепление регуляторов: где и чем? Их можно закрепить на луче и под ним. Я выбрал первый вариант, так как мне кажется, что в этом положении регулятор более защищён (это мои домыслы, не подтверждённые практикой). Вдобавок, при креплении на луче, регулятор отлично охлаждается воздухом от пропеллера. Теперь о том, как закрепить регулятор. Способов много, наиболее популярный — двухсторонний скотч + одна-две стяжки. «Дёшево и сердито», к тому же демонтаж трудностей не доставит. Хуже то, что при таком креплении можно повредить плату регулятора (если ставить стяжку на неё) или провода (если крепить на них). Так что я решил крепить регуляторы термоусадочной трубкой (25мм) и запаял их вместе с лучами. Есть один нюанс: сам регулятор тоже должен быть в термоусадке (мои в ней и продавались), чтобы не соприкасаться контактами с карбоном луча, иначе — КЗ.

Также имеет смысл приклеить по кусочку двухстороннего скотча снизу на каждый луч в месте крепления мотора. Во-первых, он защитит подшипник мотора от пыли. Во-вторых, если по какой-то причине один из болтиков открутиться, он не выпадет при полёте и не потеряется.
При сборке рамы не использовал ни одного болтика из комплекта, так как все они неприлично короткие. Вместо этого приобрёл чуть длиннее и с головкой под крестовую отвёртку (есть такое личное предпочтение).
Камера не помещалась по ширине между боковых пластин рамы. Немного обработал края её платы надфилем (скорее сточил шероховатости) и она встала без проблем. Но сложности на этом не кончились. Мне очень понравилось качество держателя для камеры от Diatone, но камера с ним не помещалась в раму по высоте (примерно на 8-10мм). Сначала я приколхозил держатель на наружной (верхней) стороне пластины через неопреновый демпфер, но конструкция получилась ненадёжной. Позже пришла идея максимально простого и надёжного крепления. Я взял только хомут от Diatone`овского крепления и одел его на отрезок прута с резьбой М3. Чтобы камера не сместилась вбок, я зафиксировал хомут нейлоновыми муфтами.

Очень понравилось, что из разъёмов на ПК пришлось паять только коннекторы для регуляторов. Полноценные трёхконтактные разъёмы у меня не вписывались по высоте, пришлось пойти на хитрость и использовать двухпиновые. Для первых пяти каналов (4 для регуляторов + 1 «на всякий пожарный») я припаял коннекторы к сигнальной площадке и «земле», для остальных трёх — к «плюсу» и «земле», чтобы можно было запитать сам ПК и уже от него — подсветку. Учитывая, что китайские клоны полётных контроллеров грешат ненадёжной фиксацией разъёма USB, его я пропаял тоже. Ещё одним моментом, характерным для клона SPRacingF3, является разъём «пищалки». Как и в случае с vbat, на верхней стороне платы находится двухконтактный разъём JST-XH, а на нижней — он продублирован контактными площадками. Закавыка в том, что у клона «земля» на разъёмe постоянная и при его использовании «пищалка» всегда будет активирована. Нормальная рабочая для «пищалки» «земля» выведена только на контактную площадку. Это легко проверяется тестером: «плюс» разъёма прозванивается с «плюсом» на контактной площадке, а «минус» — не прозванивается. Следовательно, надо припаять провода для «пищалки» к нижней стороне ПК.

Трёхконтактные разъёмы регуляторов тоже пришлось заменить. Можно было использовать четыре двухконтактных штекера, но вместо этого, я взял два четырёхконтактных штекера и вставил в один «землю» всех регуляторов, во второй (соблюдая порядок подключения моторов) — сигнальный провод.
Пластина с подсветкой по ширине больше, чем рама и выступает по бокам. Единственное место, где её не собьют пропеллеры — под рамой. Пришлось колхозить: взял длинные болты, надел на них нейлоновые муфты с предварительно проделанными прорезями (чтоб стяжки, крепящие подсветку, могли зафиксироваться) и вкрутил через нижнюю пластину в стойки рамы. К получившимся ножкам стяжками притянул пластину со светодиодами (отверстия в пластине подходили идеально) и залил стяжки термоклеем. С задней стороны пластины припаял коннекторы.
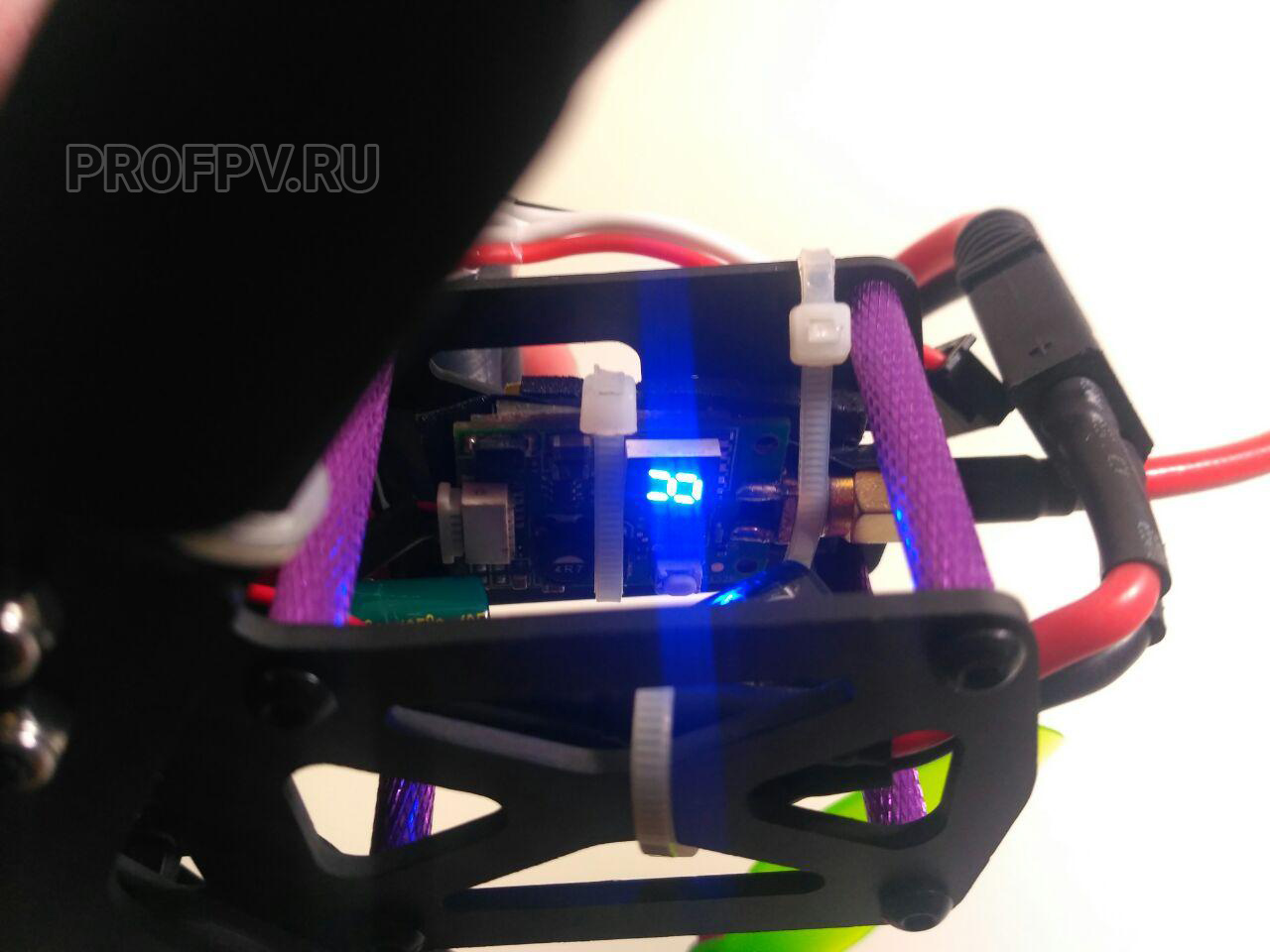
Уже после сборки, на этапе настройки выяснилось, что с пищалкой что-то не то. Сразу после подключения батареи она начинала монотонно пищать, а если активизировать её с пульта, то на этот монотонный писк накладывался ещё и ритмичный. Я сначала грешил на ПК, но после замера напряжение мультиметром, стало ясно где именно проблема. На самом деле можно было с самого начала подключить к проводам пищалки обычный светодиод. В итоге я заказал сразу несколько пищалок, послушал их и установил самую громкую.
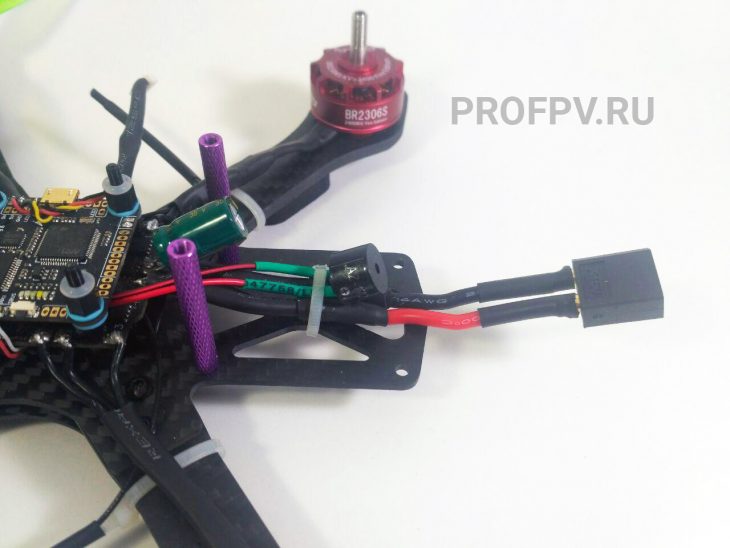
Часто PDB и контроллер крепят к раме нейлоновыми болтами, но я не доверяю их прочности. Поэтому я использовал 20мм металлические болты и нейлоновые муфты. После установки PDB я припаял питание регуляторов (остальные провода были припаяны заранее) и залил места пайки термоклеем. Главный силовой провод, идущий к батарее, я стяжкой закрепил к раме, чтобы его не вырвало в случае аварии.
С приёмника я кусачками удалил все коннекторы, кроме необходимых трёх, а перемычку между третьим и четвёртым каналами пропаял прямо на плате. Как я уже писал выше, разумнее было бы брать приёмник без коннекторов. Также я развернул у него антенны и заплавил в термоусадку. На раме приёмник хорошо поместился между PBD и задней стойкой. При таком расположении хорошо видно его индикаторы и есть доступ к кнопке бинда.

Видеопередатчик стяжками и термоклеем я закрепил к верхней пластине рамы так, чтобы через прорезь был доступ к кнопке переключения каналов и светодиодным индикаторам.

Для крепления антенны видеопередатчика в раме есть специальное отверстие. Но не стоит соединять её с передатчиком напрямую. Получается своего рода рычаг, где одним плечом служит антенна, другим — сам передатчик со всеми проводами, а место крепления разъёма будет точкой опоры, на которую придётся максимум нагрузки. Таким образом, в случае аварии почти со 100% вероятностью разъём на плате передатчика отломается. Поэтому крепить антенну надо через какой-то переходник или удлинитель.
К MinimOSD я решил припаять разъёмы, а не провода напрямую. На форумах пишут, что эта плата нередко сгорает, следовательно разумно сразу подготовиться к возможной замене. Я взял планку с коннекторами в два ряда, нижние припаял к контактным площадкам с отверстиями, а на верхние вывел vIn и vOut. После этого залил места пайки термоклеем и упаковал всю плату в термоусадку.
Последним штрихом является наклейка с номером телефона. Она даст хоть небольшую надежду в случае потери квадрокоптера.

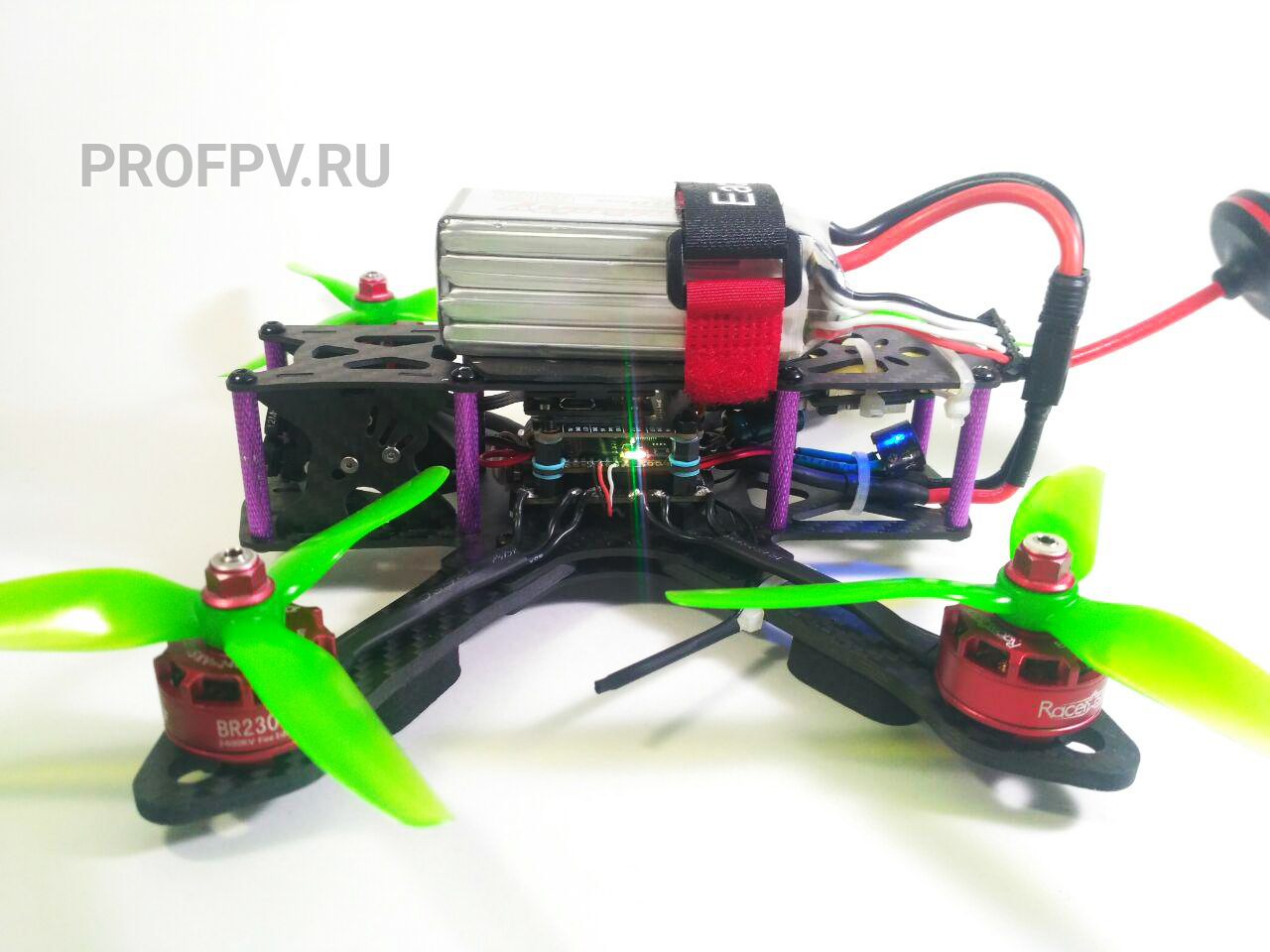
Сборка на этом подошла к концу. Получилось компактно и при этом сохранён доступ ко всем необходимым органам управления. Больше фотографий можно посмотреть здесь. Масса квадрокопрера без батареи составляет 330г, с батареей — 470г. И это ещё без экшн-камеры и крепления для неё. В следующей статье я расскажу о прошивке и настройке получившегося квадрокоптера.
Introduction: How to Build an FPV Drone (under $150)!
Let me read your mind..hmm..umm..well, you just watched some crazy footage of a dude doing some insane tricks on an FPV racing/freestyle drone, and now you WANT it. You want to build an FPV drone and fly around and do crazy tricks, but…you dont know anything about FPV drones. Questions such as, ‘what parts do I need?’, ‘Is there an easy kit for beginners?’ and ‘would I be able to do it with limited knowledge of electronics and drones?’
Ok, Im done reading your mind, the good news is, the answer is YES to all the above questions.
So lets not waste anymore time and get into it.
Dude, who are you , Ive never heard about you.
A fair question, after all, Im not Johnny FPV, or Joshua Bardwell, so why should you be listening to me? Well, if you havent seen my Youtube channel, ‘Fungineers’, I have been building stuff for almost 10 years now. From Arduino based projects to Electric Skateboards, and even a DIY Onewheel, that you can check out here!
Recently, a new bug bit me, the FPV bug, and I have built half a dozen drones in a span of 3 months!
Luckily, for those of you who are not readers but rather learn by watching (which I recommend), can see the whole playlist of videos with step by step tutorials to build your own FPV drone here
If you are still reading, then this is where the journey begins. Lets talk about the basics of an FPV drone and the parts needed.
Step 1: What’s an FPV Drone?
How is it different from a DJI Mavic/ Non-FPV drone?
The way an FPV drone is different from a normal (Mavic type) drone, is that it is a «manual» drone. Just like the difference between driving an automatic car and a manual car, or a bicycle with training wheels and without training wheels. While a DJI-type drone auto-levels and holds its altitude automatically, an FPV drone has to be controlled manually in all aspects, i.e. its altitude, rotation and speed.
The other difference is obviously that is is FPV (First Person View). The pilot flies it while looking through a set of FPV goggles that receive the video from a camera onboard the quad.
Why build an FPV drone?
If your goal is to only get slow, dreamy cinematic footage of some mountains or landscapes, DONT BUILD AN FPV drone! Buy a DJI Mavic or something similar which is beginner-friendly and usually equipped with higher res cameras. The reason people build FPV drones is the FREEDOM! It allows them to have absolute control over their drones, and to go in any direction/rotation/orientation and produce stunts, and participate in ultra-highspeed races. Some drones like Cinewhoops can also be used to make slow, cinematic footage, so you see? It gives you a lot of freedom to build whatever contraption you want for a particular day or feel. Sounds like fun?
However, I must warn you that flying an FPV drone needs a lot of practice and patience (I practiced many hours on a simulator before taking my first flight). And it can take months of practice before you can do flips and rolls and crazy maneuvers. The upside is that once you learn it, nothing compares to it in the amount of adrenaline it shoots through our veins!
Step 2: Can I Just Get a Pre-assembled FPV Drone?
Ok, maybe you are not the type that wants to solder, and attach wires and troubleshoot stuff, can you get a ‘kit’?
Absolutely! There are tons of RTF (Ready to fly) drones that you can buy-n-fly.
The most common RTF drone is the Tinyhawk, that is a little indoor drone that you can fly around the house to get into FPV, and if you like it, you can cone back and build a bigger drone!
If you are worries that a little drone wont be as much fun as the ‘real deal’, then you are mistaken. I thoroughly enjoy flying my Tinyhawks and Mobulas even to this day, both indoors and outdoors. They are fast, the are robust, and they are a ton of fun and great for beginners and professionals alike!
Check out the awesome Tinyhawk II here (make sure you buy the whole kit with controller and FPV goggles).
I did explain the different options and have a whole list of different drones you can buy (starting from $99) here.
However, building your own drone is a rewarding and a great learning experience. If you build one, chances are that you will be able to repair it yourself or replace the broken part easy and cheap, because lets face it, you are gonna crash..a lot; that’s the only way to learn.
So are you in? Let’s do this!
Step 3: What Parts Do I Need?
Ok, since you are still reading, it looks like you are determined to build your own FPV drone. Congratulations on getting through.
There are literally thousands of configurations you can build a drone, and dozens of sizes you can build it in, so that makes it hard to point out one single list of parts. The good news is, from my experience, I have put together a list of parts that are perfect for beginners and are budget friendly too.
Here is what each part does, how much it costs and where to get it:
Frame:
The body of your quad. There are many budget options. Imo, the best budget options is the $25 HSKRC:
HSKRC Frame:
Frame Option 1 ($25)
If you have some extra cash to spare and want a sleeker looking frame here is the $50 iFlight Nazgul. One of my favorite frames in terms of quality/price ratio
Frame Option 2 ($55)
Motors:
Motors can be complicated, there are so many to choose from and different kVs and rpms. Luckily, I have selected the best budget motor for you:
The Emax ECO II (Please choose 2400kv):
Emax ECO ($40) — 4 motors 2400kv
Flight Controller & ESC:
Out of everything listed here, this is probably the best deal! The Mamba Stack of Flight controller + ESC is my favorite budget pick:
Mamba Flight Controller + ESC ($40)
Camera:
Pretty decent camera for $16:
FPV Camera
Vtx (Video Transmitter):
Unbeliveable $9 Vtx:
AKK Race Vtx
Vtx Antenna:
Your Vtx also needs an Antenna (need only one):
2 Foxeer Antennas ($15)
Receiver:
Depending on your Radio, buy the compatible Receiver.
If you have a Frsky (Taranis) Radio/Transmitter (recommended):
Receiver for Frsky Radio (check Radio section below)
Propellers:
Buy lots (since you’re gonna crash and break lol)
10 pairs of 5 inch props ($7)
Batteries:
I recommend 4S batteries on 5 inch quads. You will need lots of batteries (since each one would last 5-8 minutes).
Get at least 4 of these batteries:
Tattu 4S Funfly ($20 each)
Battery Charger:
You need a charger to charge your batteries:
ISDT Nano Charger ($30)
Battery Straps:
You need some straps to hold your battery in place:
$2 Straps
That’s it for the quad, and here is where the $150 budget ends (we might be over because of the batteries and charger). What’s below, is an investment in your FPV journey. These are the Radio (Transmitter) and the Goggles. To start, lets look at some budget options. Later on, you can think about upgrading to DJI FPV system.
Radio (Transmitter):
I recommend the Taranis radio:
Taranis radio with transmitter ($140)
Goggles:
You can start with these $50 goggles, and upgrade a few months later:
$50 Eachine FPV Goggles
Essential Tools:
Soldering Iron:
A Good Budget Soldering Iron
Other parts:
AWG16 Silicone Wires, XT60 Connectors, Zipties, M5 Wrench to tighten/loosen motor screws, M2 and M3 screwdriver to build the frame.
All the parts you need, are neatly listed in a google sheet here
Step 4: Assembling the Frame
Alright, you got all the parts? Lets start building.
First thing is to build the frame. Nothing much to say here. Just follow the instructions in the video and building the frame should be a breeze.
Step 5: Soldering the Electronics
This maybe hard for some people.
Its best to get a printout of the Flight controller pinout diagram, and trace out what you are going to connect.
There are basically 3 ‘systems’ to be connected (soldered): The Camera, the Vtx, and the Receiver.
Basically each system has 3 wires: 5V to power it, Ground, and Signal. You would want to connect these to the Flight Controller on the corresponding pads.
Watch the video, as I explain step by step how to connect the different systems to the Flight Controller, and some soldering «tips» (no pun intended).
In the next step we will connect the ESC and the power cables.
Step 6: Soldering the ESC to the Motors
This could require some fine soldering skills.
If you have a 4in1 ESC (which is in the parts list), you can directly connect 3 wires of each motor (in any order) to each side of the ESC, and you are done!
If you have 4 small ESCs, one for each motor, you can connect the 3 wires from each motor to one side, and connect the 2 power wires from the ESC to the flight controller, with an additional little white wire as well.
Watch the video to see how this is done.
Step 7: Powering Up for the First Time
Once you have snipped some wires and connected it to the + and — of your flight controller on one end, and a female XT60 connector on the other end, you are ready to power your quad.
CAUTION: LiPos are extremely dangerous. A single LiPo battery has the energy density to set your house on fire! Extreme care and caution must be taken when dealing with Lithium batteries. Make sure you have connected the + and — properly. Make sure they are not reversed or touching each other. Check with a mulitmeter for any shorts between the + and —
It is highly recommended to use a smoke stopper.
Please be careful, your safety is the most important thing. without it, nothing is worth it!
Ok, if you connect your battery (if you didnt buy a battery yet, you can plug in a 12-16V DC power source (from a power supply). Once you connect it, you should hear 5 beeps (watch the previous video for instructions) and you should see some LEDs start to blink on your Flight Contoller. If that doesnt happen, or you see smoke, disconnect the battery immediately and retrace your steps. You must have shorted some wires.
Once you have successfully performed this step, we can now connect our receiver, bind our radio, and be ready to configure our Flight Controller in Betaflight on the computer!
Step 8: Radio Basics
Ok, we are ready to connect our Receiver to the flight controller and bind it to the Radio, but it is important that we learn some Radio basics first.
A Radio or a Transmitter is what you use to fly your quad. There are 4 modes, we use a mode 2 radio (means throttle is on the left stick, and directions are on the right stick.
The Throttle makes your quad move up and down
The Yaw, on the same stick makes your quad turn its head, kinda like you do to look around.
The Pitch makes the quad go forward and backward, and the yaw, makes it go left or right. In the video above, I have a very easy explanation for these basic terms.
Step 9: Binding Your Radio to the Receiver
Your receiver comes with 3 connections 5V, Gnd, and SBUS. These are connected to your FC as such (as shown in the prevoius video about soldering stuff to the Flight Controller).
Once the receiver is connected, we can bind it to the radio.
Just power on the quad, and you should see the receiver turn on. Also turn on your radio, at this point, it should show no signal. Press the button on the receiver for 3-4s, and after searching, your radio should show full signal and it is now connected and talking to the receiver. Thats it!
The radio and receiver are now talking, and the binding is done. You only have to do this one time! So now, you can ziptie/glue/bolt your receiver to your quad and mount your antennas properly (shown in the video above).
Step 10: Connecting and Configuring the Vtx
A lot of people are confused with the Vtx, since there is a lot of data associated with the vtx. The power levels, the bands, frequencies, channels, etc.
I explained it in detail in the video above, but here is a crude explanation:
Power level (mW): This directly determines how far you can go. The greater the power level you run the vtx on, the better and further the signal can travel. However, your vtx will run significantly hotter with greater power level!
Usually, I run it at 200mW for short range flying, and freestyle practice sessions.
Band: A band is like a small area that you are allocated, so that you dont interfere with the person flying a quad next to you (this was a real problem in races back in the day!). So you can select a band, and let others know so they select a different band (if you are flying alone you dont need to worry).
Channels: Within bands, there are different channels, so 8 people can run on the same band, but on 8 different channels.
At this point, you can power it on (DO NOT POWER ON YOUR Vtx WITHOUT AN ANTENNA) and power on your goggles, and search for the channel the vtx is on, and the goggles should show on its screen what the camera is seeing. Congratulations, your video feed is setup!
Again, detailed explanation can be found in the video above.
Step 11: Connecting to Betaflight and Programming Your Quad
Your hardware setup is complete (except for bolting on the propellers which we will do later), but you still have to configure your flight controller and your ESCs.
For this, we use 2 software:
BlHeli for configuring the ESCs
Betaflight for configuring and programming the Flight Controller.
Both software are free and open source!
There are 2 versions available, full version and a chrome app. I prefer to use the chrome app since its quick and gets the job done!
So just download the Chrome app for BLHeli Suite and Betaflight, and we should be good to go.
Connect the Flight Controller to our computer via a USB cable. Now open Betaflight and click the Connect button on the top right, and you should be able to connect your quad and see a bunch of new tabs and a new window open up. If your flight controller is not connecting to the computer, you probably dont have the right drivers.
First, download the CP 210 driver and the STM Vitual COM port driver and install them on your computer.
Now, try to restart Betaflight and try to connect your Flight controller to Betaflight. If all is correct, it should connect now, and on Betaflight, you should see a new page with a quad and some options on the left.
The complete configuration can be found in the video above where I show Betaflight setup and BL Heli setup.
Once done, we should be able to spin or motors via our Radio! Basically, at this point, we can go out and fly..but wait..
Step 12: Setting Up the Arm Switch (and Other Modes) on Your Radio
Before we can do any flying, it’s very important to set an arm/disarm switch on your quad. This would be like an on/off button.
This is easily done on betaflight in the Modes tab. Make sure to double check after a switch is set.
Its also helpful to set the Horizon/Angle/Acro mode switch on a 3-way switch.
I also set a Failsafe switch and a Beeper switch.
The entire setup can be seen in the above video.
Step 13: First Flight (not on Your Quad)
Not only do I highly recommend practicing on a simulator, I think its essential.
When I built my first FPV drone, I didnt practice on a simulator. «How hard could it be», I said to myself.
IT was a disaster, I could hardly keep the quad in the air for more than 10 secs, and ended up having numerous crashes and lost my vTX antenna.
The point is, a simulator would be cheaper to get ($16-20) and practice on, than going out and breaking your quad that you worked so hard on.
Once you are comfortable with a sim (I took about 10 hours to get it), you can go out and fly!
Step 14: Bolting Props to Your Quad
we haven’t bolted our propellers to the quad yet…and I purposely left it for last. Why? Because there is a special way to bolt the props. As the image above shows, the props are meant to be bolted down in a certain CW (clock-wise) and CCW (counter clock-wise) orientation.
Make sure you mount it as shown in the video.
Once the props are mounted, lets take the quad out flying!
Step 15: First Flight (finally!)
Ok, its fly-day! yayy!
First thing is to get your battery out (make sure its charged to 4.2V) and connect it and strap it down. Wait, before that, make sure your Radio is turned off! You dont want props spinning as soon as you connect the battery.
These props spin at a very high speed and can cut through your fingers!
The battery should be strapped properly; make sure all wires and connectors are out of the way of the props and secured properly, last thing you want is to get your props chopping your battery leads.
Now step away from your quad a couple feet, and push the arm switch. Your quad should now arm, i.e you should see your propellers spinning. Yuhoo! congrats.
If your props are not spinnig, make sure your throttle is at the lowest, and try again. Sometimes it takes a couple of tries to arm. Still not arming? Turn on your goggles and wear them, and try to arm. You should see the warning that is related to this no-arming error.
Once you figure out, your quad should arm now at the flick of the arm switch and disarm when flicked back. Practice this a couple times. Now, try to arm and give your quad some throttle, and should start to hover, if this doesnt happen, increase throttle. If the quad still doesnt leave the ground but you can see motors spinning faster, or the quad just flips over and crashes whenever you blip the throttle, then you have bolted your props incorrectly. Go back to the previous step and re-bolt your props.
After this is done, you should be able to fly your quad up and down (make sure you are in Angle mode; highly recommended for beginners). Try to maintain throttle and keep the quad level in one place, once you are comfortable try moving forward and backward and left and right to get a feel of the sticks.
After a couple of days, its time to put on your goggles and fly real FPV!
Step 16: Final Words. Going Further…
By now, you should be getting good at flying. Perhaps you are having a lot of crashes? That’s normal. Just keep practicing flying (in Acro mode) and you will get better with time. Make sure you order spare motors, props, nuts, quadcopter arms, escs, etc., because I hate to break something and then wait for 2 weeks until it ships.
Well, that’s about it. Now its up to you to go as far and wide with this hobby as you can. If you read the whole thing, thanks for sticking around!
When you think you’re a good pilot, and want to stay in the hobby, its time to look into the DJI FPV system, and get better goggles, radio, and equipment. But for now, enjoy what you have built!
If you do follow this guide and build your quad, I would love to see it!
Hit me up on the Fungineers Youtube Channel, or on instagram @fungineerstech
Собираем квадрокоптер своими руками (FPV). FrogII + Mamba F405
Привет! Давно хотел написать подобную статью с максимально подробной инструкцией как собрать квадрокоптер своими руками. Но сразу скажу, что цена такого квадрокоптера выйдет около 11 тысяч рублей. Это без учета стоимости FPV шлема, аккумуляторов, радиоаппаратуры и зарядного устройства. А полный комплект обойдется вам в примерно 21000 рублей. Подробнее о стоимости квадрокоптера можно, например, почитать здесь и здесь (окончание статьи с итогами). Сборка получилась весьма интересной, шустрой и крепкой. В общем, на текущий момент это мой любимый квадрокоптер.
Краткий обзор комплектующих.
Рама — Transtec Frog Lite II (Купить можно здесь(Aliexpress)
Моторы — Aokfly DR2205 2500kv (Покупаем здесь (Aliexpress)
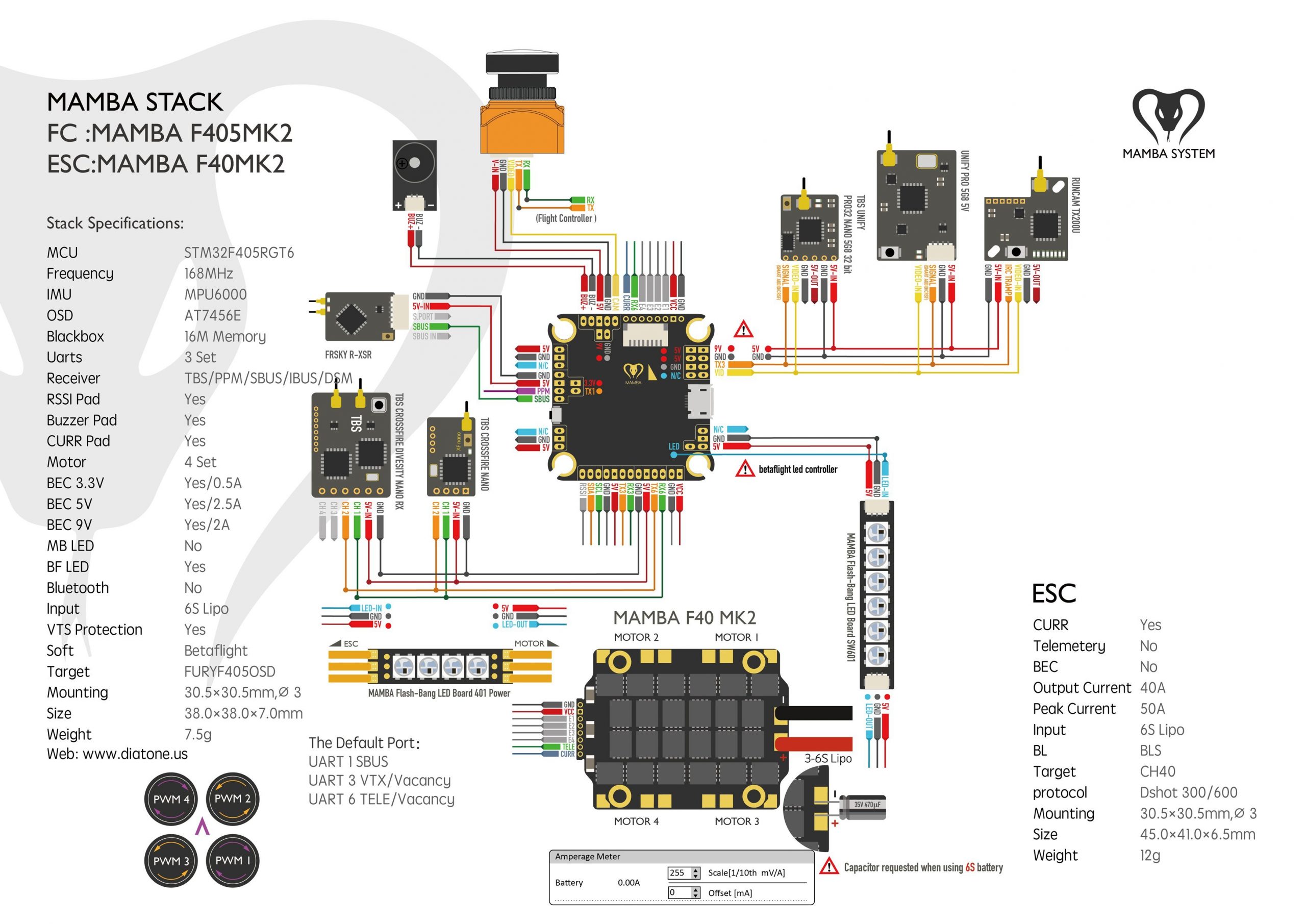
Полетный контроллер Mamba F405 mini MK2 в стэке с регулятором ESC 4-в-1 (Покупал здесь (Aliexpress)
FPV камера — Foxeer Predator 4
Видеопередатчик — Foxeer Clear/ClearTX2
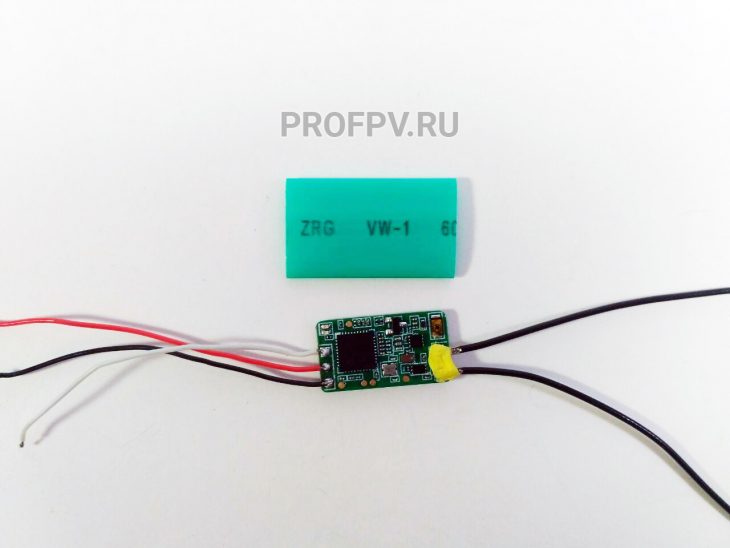
Приемник радиоаппаратуры Flysky FS-IA6B, модернизированный (добавлены каналы, уменьшен размер и добавлена функция RSSI). О том, как это сделать описано в статье про RSSI. Но я сразу вам рекомендую облегчить задачу и заказать себе что-нибудь миниатюрное типа Fli14 и будет вам счастье.
Ну вот, все основное перечислил, теперь переходим к описанию сборки квадрокоптера. Вперед!!!
Сборка рамы.

Вот так выглядит рама нашего будущего квадрокоптера в разобранном виде (слева расположена карма квадрокоптера). Во-первых, вы должны зафиксировать все 4 луча квадрокоптера между двумя центральными пластинами. Сделайте это с помощью 8 винтов из комплекта. 4 самых близких винта проденьте шляпкой вниз и затяните обычной гайкой (капните немного синего фиксатора на резьбовое соединение), 2 крайних правых и два крайних левых (на рисунке это нижние и верхние) — шляпкой вверх и затяните гайками с пластмассовыми втулками. Этим гайкам фиксатор не нужен.
Установка моторов на раму.

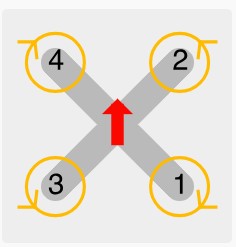
Теперь надеваем защиту на лучи и распределяем моторы квадрокоптера по направлению вращения. CW — моторы с вращением по часовой стрелке, CCW — против часовой. Провода должны смотреть в сторону центра квадрокоптера вдоль лучей. Классическая схема, по которой должны вращаться моторы, указана на рисунке. Но так как мы с вами собираем квадрокоптер своими руками, то вы можете выбрать абсолютно противоположный вариант. В общем, это потом легко настраивается.
Прикручиваем их, но не забываем капать фиксатор резьбы на соединения. Винты крепления нужны с длиной резьбовой части 7 мм. Этот квадрокоптер имеет толщину лучей 4 мм, плюс защита торцов 1 мм, плюс 2 мм само соединение. Итого 7 мм.
Главное не переборщите с длиной и перед затягиванием убедитесь в том, что винт не повредит обмотку мотора.
Установка регулятора оборотов 4-в-1.


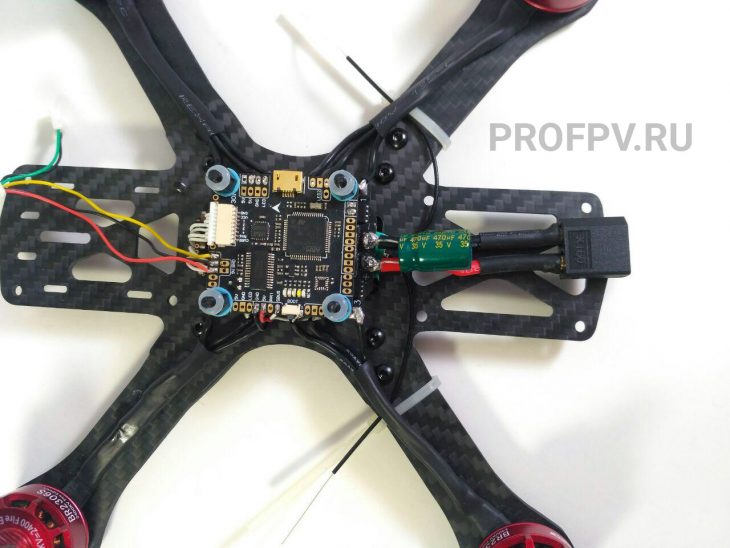
Чтобы правильно сориентировать регулятор оборотов, достаточно глянуть на обозначения номеров моторов на углах платы и надеть плату на 4 центральных винта. Контакты +/- должны оказаться сзади. Зафиксируйте плату нейлоновыми стойками, идущими в комплекте со стеком Mamba F405. Далее уже приступаем непосредственно к пайке компонентов.
Прежде чем паять моторы к регулятору, отмеряем длину проводов до ближайших 3 контактов (относительно каждого мотора/луча) с небольшим запасом, отрезаем. Зачищаем провод где то на 3 мм, лудим. Лудим все контакты на плате регулятора. Дальше припаиваем провода от моторов также как на рисунке. Провода от моторов припаиваются к трем соответствующим этому мотору площадкам в любом порядке.

К контактам +/- припаиваем коннектор XT-60 как показано на рисунке. На этом можно считать работу с силовой частью квадрокоптера завершенной.
Теперь пришло время снабдить наш квадрокоптер глазами, ушами и мозгом.
Подключение FPV системы, приемника и пищалки к полетному контроллеру квадрокоптера.
Подключение FPV камеры.
Все FPV камеры, так или иначе, практически не отличаются друг от друга способом подключения к полетному контроллеру.  Чаще всего из камеры выходят 3 провода: черный — минус питания камеры (земля), красный — плюс питания камеры, желтый — видеосигнал. Теперь давайте разберем наш случай: камера Foxeer Predator 4 поддерживает напряжение питания 5-40 вольт. Наш полетный контроллер имеет на борту преобразователь напряжения на 5 и на 9 вольт. Например, будем использовать 9 вольт. Все контакты на плате Mamba F405 удобно распределены по группам для того, чтобы было легче паять (смотрите картинку). Хочу отметить, что я прежде всего припаиваю всю периферию, а уже потом устанавливаю плату на нейлоновые стойки. Делаю я так для правильной пайки. То есть, другими словами, провода продеваем в отверстия снизу, а припаиваем сверху, а не как многие блогеры, суют провод в отверстие и тут же жарят изоляцию. Дальше на фото будет видно, что я имею ввиду.
Чаще всего из камеры выходят 3 провода: черный — минус питания камеры (земля), красный — плюс питания камеры, желтый — видеосигнал. Теперь давайте разберем наш случай: камера Foxeer Predator 4 поддерживает напряжение питания 5-40 вольт. Наш полетный контроллер имеет на борту преобразователь напряжения на 5 и на 9 вольт. Например, будем использовать 9 вольт. Все контакты на плате Mamba F405 удобно распределены по группам для того, чтобы было легче паять (смотрите картинку). Хочу отметить, что я прежде всего припаиваю всю периферию, а уже потом устанавливаю плату на нейлоновые стойки. Делаю я так для правильной пайки. То есть, другими словами, провода продеваем в отверстия снизу, а припаиваем сверху, а не как многие блогеры, суют провод в отверстие и тут же жарят изоляцию. Дальше на фото будет видно, что я имею ввиду.
Вот мы присоединили камеру, теперь полетный контроллер уже умеет принимать сигнал от нее и накладывать различную информацию на картинку (OSD-on screen display), но еще не умеет передавать изображение в FPV очки или шлем. Для этого нужен видеопередатчик.
Подключение видеопередатчика.
Выбранный мной передатчик Foxeer Clear/ClearTX2 имеет шесть контактов. 
Красный — плюс питания передатчика, черный — минус питания, зеленый — SmartAudio (позволяет управлять мощностью с пульта радиоаппаратуры), желтый — вход видеосигнала из ПК после наложения на него информации (OSD). Есть еще черный и белый провода для питания камеры, но нам они в этой сборке не нужны. Обрезаем коннектор со стороны ПК, зачищаем, лудим провода и припаиваем согласно рисунку. Все провода желательно скручивать для того, чтобы уменьшить воздействие помех от регулятора оборотов.
Едем дальше…
Подключение приемника Flysky FS-iA6b по протоколу i-bus.
Изначально приемник Flysky FS-IA6B имеет несколько способов подключения, но мы остановимся именно на i-bus, так как это наиболее быстрый способ передачи данных от передатчика к ПК. Подключается приемник тремя проводами: красный — плюс питания обязательно 5 Вольт, черный — земля и i-bus. На полетном контроллере нет контакта i-bus, а есть s-bus. К нему мы его и подключим, но не пугайтесь, все будет работать. Использованный мной приемник можно дополнительно прошить на 14 каналов и уменьшить его размер за счет удаления корпуса и контактной платы вот до таких размеров… Я думаю, что к тому моменту, когда вы читаете данный текст, на сайте уже есть статья о том, как это сделать. Воспользуйтесь поиском по сайту со словом «RSSI».

Ну, вот мы и подобрались к моменту компоновки всех деталей нашего самодельного квадрокоптера.
Окончательная сборка квадрокоптера.
Буду приводить картинки и прокомментирую все дальнейшие действия, я думаю, что все будет понятно.

- Воспользуйтесь изолентой или стяжками для того, чтобы провода, идущие к моторам, были зафиксированы на лучах.
- Соберите «башню» квадрокоптера и установите в нее камеру. В комплекте к камере есть все крепления.
- Облегченный приемник радиоаппаратуры устанавливаем на стяжки под «башню», видеопередатчик на нее, или все наоборот. Возможно, у вас получится лучше скомпоновать их. Можно творчески подойти к этому моменту.
- Устанавливаем полетный контроллер на стойки в соответствии с направлением стрелки. Соединяем шлейфом ПК и регулятор оборотов 4 в 1.
- Устанавливаем «башню» на раму. На первое время прикрутите ее винтами без фиксатора резьбы. После того, как мы убедимся, что квадрокоптер своими руками полностью работоспособен, можно будет перекрутить их с фиксатором.
- Антенны радиоаппаратуры крепите вдоль передних двух лучей. Многие FPVшники мне сейчас плюнут в лицо, но я не заметил каких то проблем с радиосвязью аппаратуры до 300-400 метров. Ведь мы с вами используем бюджетную аппаратуру Flysky и ждать от нее большего не имеет смысла.
- Прикрепите buzzer (пищалку) к лучу, но оставьте отверстие в нем открытым и снимите наклейку. Всё.
Теперь несколько слов о недостатках этой сборки и о том, как я вышел из данной ситуации.  Главный недостаток — это размер приемника! (мне просто надо было его куда то пристроить). В самом начале статьи я рекомендовал вам выбрать миниатюрный приемник. Но даже с такими его размерами, я постарался не испортить внешний вид квадрокоптера. Я спроектировал и распечатал на 3д принтере крышку (скачать stl файл), под которую спрятал видеопередатчик. Кроме того, удобно закрепил антенну на ней. По-моему получилось неплохо…
Главный недостаток — это размер приемника! (мне просто надо было его куда то пристроить). В самом начале статьи я рекомендовал вам выбрать миниатюрный приемник. Но даже с такими его размерами, я постарался не испортить внешний вид квадрокоптера. Я спроектировал и распечатал на 3д принтере крышку (скачать stl файл), под которую спрятал видеопередатчик. Кроме того, удобно закрепил антенну на ней. По-моему получилось неплохо… 
Прошивка и настройка самодельного квадрокоптера.
Ну вот, мы своими руками собрали квадрокоптер, осталось его настроить.
Первым делом устанавливаем необходимые приложения: Betaflight Configurator и BLHeli Configurator. Первый нужен для прошивки и настройки полетного контроллера, а второй для настройки регулятора оборотов. Оба конфигуратора можно установить двумя способами: Во-первых, если у вас браузер Chrome, то их можно установить в качестве расширений для него. Во-вторых, можно установить их как отдельные приложения. Ссылки ниже:
BLHeli configurator — браузерное расширение, BLHeli configurator — отдельное приложение.
Betaflight Configurator — браузерное расширение, Betaflight Configurator — отдельное приложение.
Прошивка.
- Запускаем Betaflight Configurator (полетный контроллер пока не подключаем). На начальной странице видим список драйверов, которые необходимо установить. Устанавливаем все.

- Теперь можно обновить прошивку полетного контроллера. Закрываем Betaflight, зажимаем кнопочку boot на полетном контроллере и держим, снова запускаем Betaflight, отпускаем кнопочку boot.
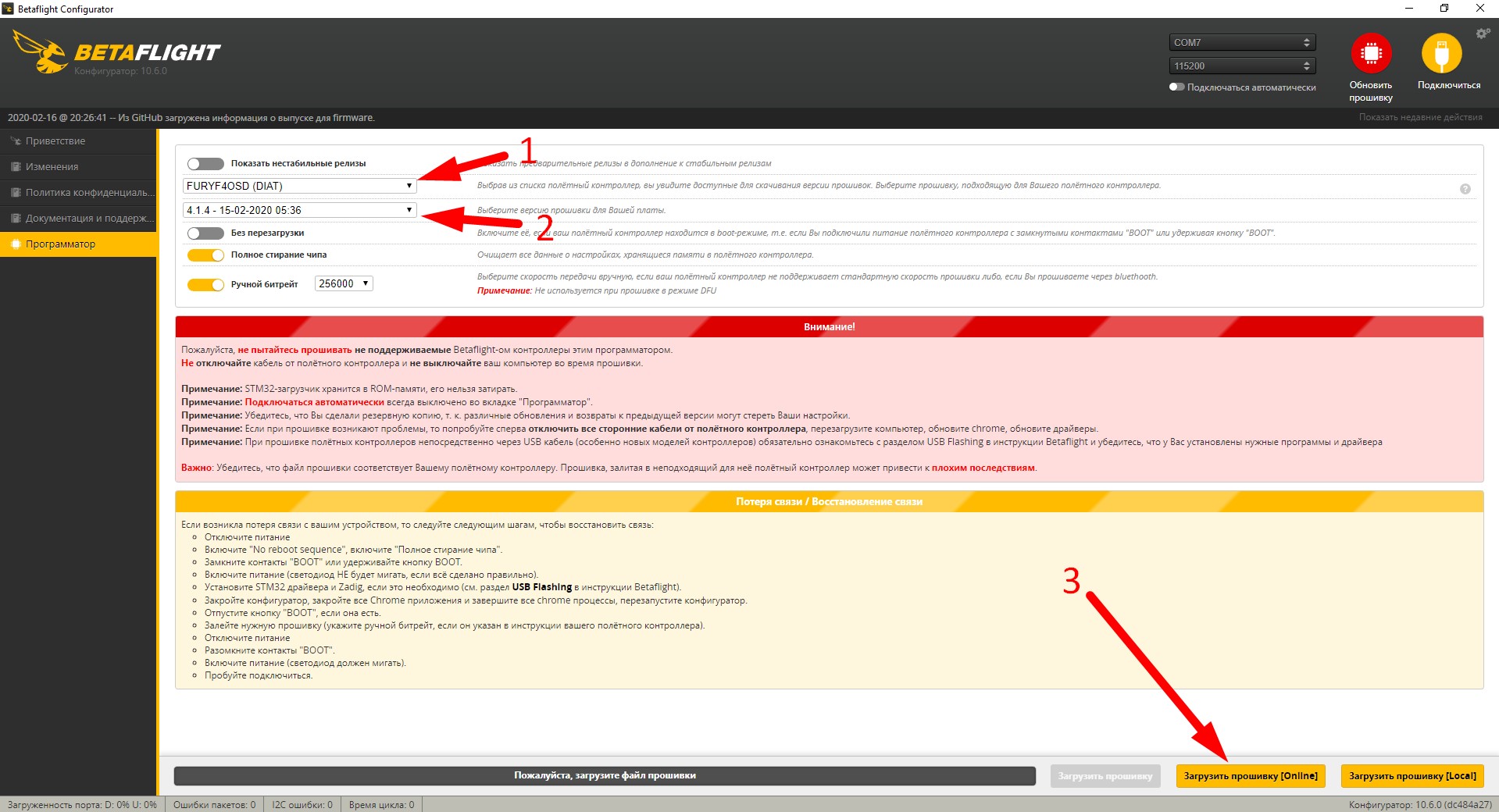
 Прежде всего вы должны убедиться в том, что установлен режим DFU (маркер 1 на картинке). Если этого не произошло, попробуйте повторить предыдущие шаги. Также проблемы могут возникнуть из-за криво установленных драйверов. Эту проблему можно решить очень полезной утилитой. Запустите ее от имени администратора, и она все сделает за вас. После этого, попробуйте снова.
Прежде всего вы должны убедиться в том, что установлен режим DFU (маркер 1 на картинке). Если этого не произошло, попробуйте повторить предыдущие шаги. Также проблемы могут возникнуть из-за криво установленных драйверов. Эту проблему можно решить очень полезной утилитой. Запустите ее от имени администратора, и она все сделает за вас. После этого, попробуйте снова. - Далее, переходите на вкладку программатор.
- Из выпадающего списка выберите полетный контроллер Fury4OSD (DIAT) .
- В следующем выпадающем списке выберите последнюю стабильную версию прошивки.
- Нажмите на ползунок «полное стирание чипа».
- При подключенном интернете нажмите кнопку «Загрузить прошивку (Online)». Дождитесь загрузки прошивки. После этого кнопка «Загрузить прошивку» станет активной.

- Нажимаем кнопку «Загрузить прошивку» и дожидаемся окончания ее заливки в полетный контроллер (ПК). Всё.
- Отключаем ПК. Подсоединяем снова, но уже без зажатой кнопки boot. ПК должен мигать разноцветными светодиодами.

 Прежде всего вы должны убедиться в том, что установлен режим DFU (маркер 1 на картинке). Если этого не произошло, попробуйте повторить предыдущие шаги. Также проблемы могут возникнуть из-за криво установленных драйверов. Эту проблему можно решить очень полезной
Прежде всего вы должны убедиться в том, что установлен режим DFU (маркер 1 на картинке). Если этого не произошло, попробуйте повторить предыдущие шаги. Также проблемы могут возникнуть из-за криво установленных драйверов. Эту проблему можно решить очень полезной 
Настроим квадрокоптер своими руками.
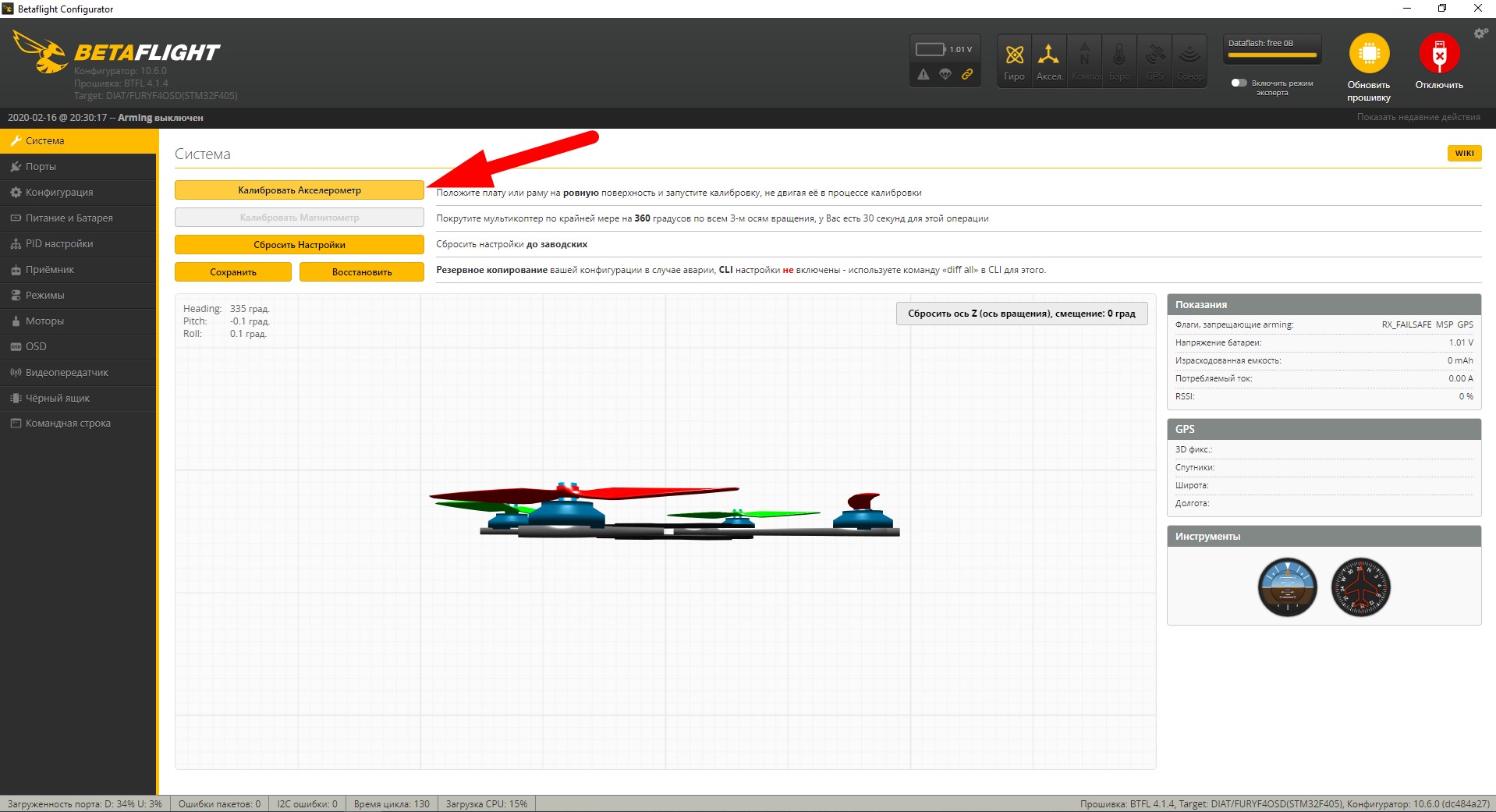
- Жмем кнопку «Подключить». Вверху окна включаем режим эксперта. Переходим на вкладку «система», устанавливаем квадрокоптер на горизонтальную плоскость и нажимаем «Калибровать Акселерометр». Можете покрутить теперь квадрокоптер своими руками, и вы увидите как реагирует картинка на экране. На этой вкладке закончили.

- Идем на вкладку «порты». Делаем все как на картинке. Сохраняем и перезагружаем. Подключаем снова.

- Повторите все настройки, представленные на следующих нескольких картинках .Но не забывайте сохранять и перезагружать.



- На вкладке PID настройки оставьте значения по умолчанию. Квадрокоптер с ними ведет себя нормально. Впоследствии вы всегда можете углубиться в эту довольно сложную тему. На просторах рунета есть много статей про настройку PID регулятора.
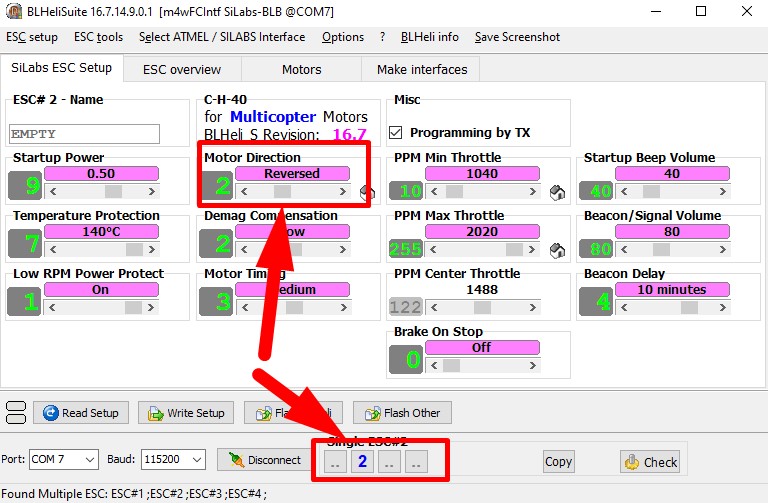
- Теперь мы с вами подобрались к проверке корректности вращения моторов квадрокоптера.
 Моторы уже могут вращаться. Но нужно убедиться в том, что они все крутятся в нужную нам сторону. Во-первых, снимите пропеллеры, если они установлены, или просто отвинтите фиксирующие гайки. И, вообще, желательно все настройки производить в таком состоянии. Установленные пропеллеры — это риск нанести себе травму! Во-вторых, подсоедините аккумулятор к квадрокоптеру. Дальше переходим на вкладку «Моторы» конфигуратора Betaflight. Теперь включаем ползунок под маркером 2 на картинке. В блоке под маркером 3 указано правильное направление вращение для каждого из моторов.
Моторы уже могут вращаться. Но нужно убедиться в том, что они все крутятся в нужную нам сторону. Во-первых, снимите пропеллеры, если они установлены, или просто отвинтите фиксирующие гайки. И, вообще, желательно все настройки производить в таком состоянии. Установленные пропеллеры — это риск нанести себе травму! Во-вторых, подсоедините аккумулятор к квадрокоптеру. Дальше переходим на вкладку «Моторы» конфигуратора Betaflight. Теперь включаем ползунок под маркером 2 на картинке. В блоке под маркером 3 указано правильное направление вращение для каждого из моторов. - Переходим к блоку 4. Сначала плавно поднимаем ползунок возле мотора №1 и смотрим, куда он вращается. Если по часовой стрелке, тогда все хорошо, переводим ползунок вниз. Точно так же проверяем все оставшиеся моторы и выписываем те из них, которые вращаются в противоположную от нужной стороны. Выписали? Идем дальше.






 Моторы уже могут вращаться. Но нужно убедиться в том, что они все крутятся в нужную нам сторону. Во-первых, снимите пропеллеры, если они установлены, или просто отвинтите фиксирующие гайки. И, вообще, желательно все настройки производить в таком состоянии. Установленные пропеллеры — это риск нанести себе травму! Во-вторых, подсоедините аккумулятор к квадрокоптеру. Дальше переходим на вкладку «Моторы» конфигуратора Betaflight. Теперь включаем ползунок под маркером 2 на картинке. В блоке под маркером 3 указано правильное направление вращение для каждого из моторов.
Моторы уже могут вращаться. Но нужно убедиться в том, что они все крутятся в нужную нам сторону. Во-первых, снимите пропеллеры, если они установлены, или просто отвинтите фиксирующие гайки. И, вообще, желательно все настройки производить в таком состоянии. Установленные пропеллеры — это риск нанести себе травму! Во-вторых, подсоедините аккумулятор к квадрокоптеру. Дальше переходим на вкладку «Моторы» конфигуратора Betaflight. Теперь включаем ползунок под маркером 2 на картинке. В блоке под маркером 3 указано правильное направление вращение для каждого из моторов.Изменение направления вращения моторов квадрокоптера.
Настройка радиоаппаратуры Flysky.
Настройка радиоаппаратуры сводится к трем моментам. Во-первых, это реверс основных каналов (Roll, Pitch, Yaw, Throttle). Но только если потребуется. Во-вторых, это переназначение дополнительных (AUX) каналов. В-третьих, это настройка Failsafe. Запомните немаловажную информацию: в аппаратуре Flysky I6 сохранение любых измененных настроек происходит не кнопочкой «Ok», а длительным нажатием кнопки CANCEL!!!
Во-вторых, это переназначение дополнительных (AUX) каналов. В-третьих, это настройка Failsafe. Запомните немаловажную информацию: в аппаратуре Flysky I6 сохранение любых измененных настроек происходит не кнопочкой «Ok», а длительным нажатием кнопки CANCEL!!!
Как проверить, требуется ли делать реверс основных каналов в аппаратуре? 

Подключаем ПК к компьютеру, запускаем Betaflight, подсоединяем аккумулятор. Заходим на вкладку «Приемник». Двигаем стиками на аппаратуре и наблюдаем, как ведет себя изображение квадрокоптера на экране при повороте стиков в ту или иную стороны. Например, при повороте стика Yaw вправо, квадрокоптер должен вращаться вправо, и, наоборот. Точно так же необходимо проверить все органы управления, особенно Throttle (Газ). Если какой-либо канал работает не так как надо, тогда необходимо сделать реверс в самой аппаратуре.



Как вы можете видеть, в моем случае ничего менять не пришлось. На этом этапе будьте аккуратны и не включите реверс третьего канала (газ). Это может привести к тому, что при включении квадрокоптера он даст газ на полную!
AUX каналы.
Под AUX каналами в радиоаппаратуре подразумевают всякие дополнительные тумблеры и крутилки, которые используют для включения различных функций, а также управляют полетными режимами квадрокоптера. У нашего приемника Flysky FS-iA6b 6 каналов. Но всего 2 дополнительных. Допустим, что у нас один дополнительный канал будет отвечать за включение пищалки (крайний левый тумблер), а второй (трехпозиционный переключатель) — за изменение полетного режима. В аппаратуре это делается так:



Здесь я тумблер пищалки (SwA) переназначил на 6 канал (AUX 2), а трехпозиционный переключатель (SwC) установил на 5 канал (AUX 1).
Теперь идем в Betaflight и делаем все точно также, как указано на картинке (чтобы ползунки стали активными нужно нажать на кнопку «Добавить диапазон» и выбрать соответствующий канал AUX). 
Таким образом, при включении левого тумблера, будет звучать сигнал зуммера. Это полезная функция, которая помогает искать квадрокоптер в траве, если тот, например, упал.
Трехпозиционный переключатель позволит нам выбрать полетный режим: выключенное состояние — Disarm (моторы остановлены), вторая позиция — Arm (Моторы вращаются) и Angle (режим стабилизации), третья позиция — Arm и Acro (акробатический режим). Про режимы я советую вам почитать статьи на просторах рунета, в рамках этой статьи невозможно передать всю информацию по этой теме.
Настройки Failsafe. Квадрокоптер своими руками.
Failsafe — это очень важная функция, миссия которой, сохранить квадрокоптер, сделанный своими руками, в случае потери связи от радиоаппаратуры, а также чужое имущество.
На стороне аппаратуры мы должны настроить Failsafe хотя бы на одном канале. Рекомендую 3 (газ):




На стороне полетного контроллера делаем точно так же, как на картинке: 
Работает функция по следующему алгоритму. Например, потеряна связь, квадрокоптер на 3 секунды включает режим стабилизации, тем самым выпрямляет его, затем отключает моторы и включает зуммер (пищалку). Не игнорируйте эту настройку. А еще лучше не выходите в поле, пока не проверили работу функции дома без пропеллеров.
Настройка OSD
На этой вкладке мы долго задерживаться не будем, так как, настройка OSD — это личные предпочтения каждого пилота. 
Здесь вы смело можете экспериментировать с той информацией, которую хотите видеть на экране вашего FPV шлема или очков (ставя или убирая галочки), а также с месторасположением их на картинке (просто передвигая надписи). Обычно самым важной информацией для FPV пилота квадрокоптера является израсходованная емкость аккумулятора. Зная ее, вы вовремя посадите свой квадрокоптер и сохраните и его и недешевые аккумуляторы.
Вот вроде бы и все. Перед первым запуском квадрокоптера с установленными пропеллерами, еще раз проверьте следующие моменты:
Во-первых, корректность работы каналов (особенно газа!)
Во-вторых, Failsafe! Для этого достаточно отключить аппаратуру, и посмотреть, работает ли квадрокоптер по нашему сценарию.
В-третьих, я мог, что-то упустить из виду и не описать в статье какую-нибудь мелочь. Пишите комментарии, я постараюсь быстро ответить.
UPD: Как настроить датчик тока на полетном контроллере квадрокоптера? Читайте здесь.
Поделиться ссылкой:
Все началось с того, что нам очень понравилась FPV камера Caddx Tarsier 4K из-за принципа 2 в 1, так как не надо будет лепить экшен-камеры на раму квадрокоптера. Поэтому, было решено собрать квадрокоптер вместе с этой камерой, хоть она и предназначена для микро-квадрокоптеров.
Далее в статье мы объясним, каким образом была закреплена плата и сама камера в раме. Пошаговая сборка квадрокоптера своими руками под силу любому, кому интересна эта тема, в статье все рассказываем максимально подробно.
Содержание
- Что нужно для сборки квадрокоптера? Инструменты
- Вступление
- Электроника квадрокоптера и другие компоненты
- Сборка квадрокоптера. Собираем дрон своими руками
- Схема монтажа
- Сборка рамы
- Подключение моторов квадрокоптера: установка двигателей
- Установка полетного контроллера
- Монтаж проводов для камеры
- Монтаж приемника
- Установка видеопередатчика и пищалки
- Монтаж Caddx Tarsier 4K в стэк, в башню
- Последние штрихи
- Прошивка и настройка квадрокоптера после сборки своими руками
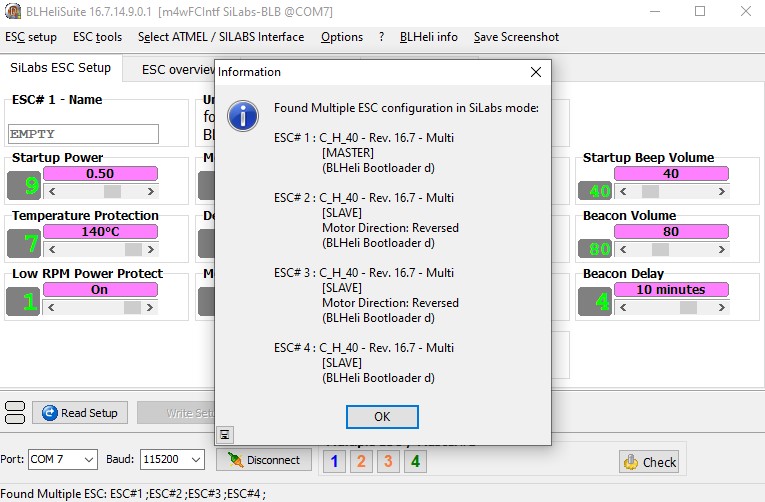
- Прошивка регуляторов оборотов в BLHeliSuite
- Прошиваем полетный контроллер в Betaflight Configurator
- Вкладка Система
- Вкладка Порты
- Вкладка Конфигурация
- Вкладка Питание и батарея
- Вкладка Приемник
- Вкладка Режимы
- Вкладка Моторы
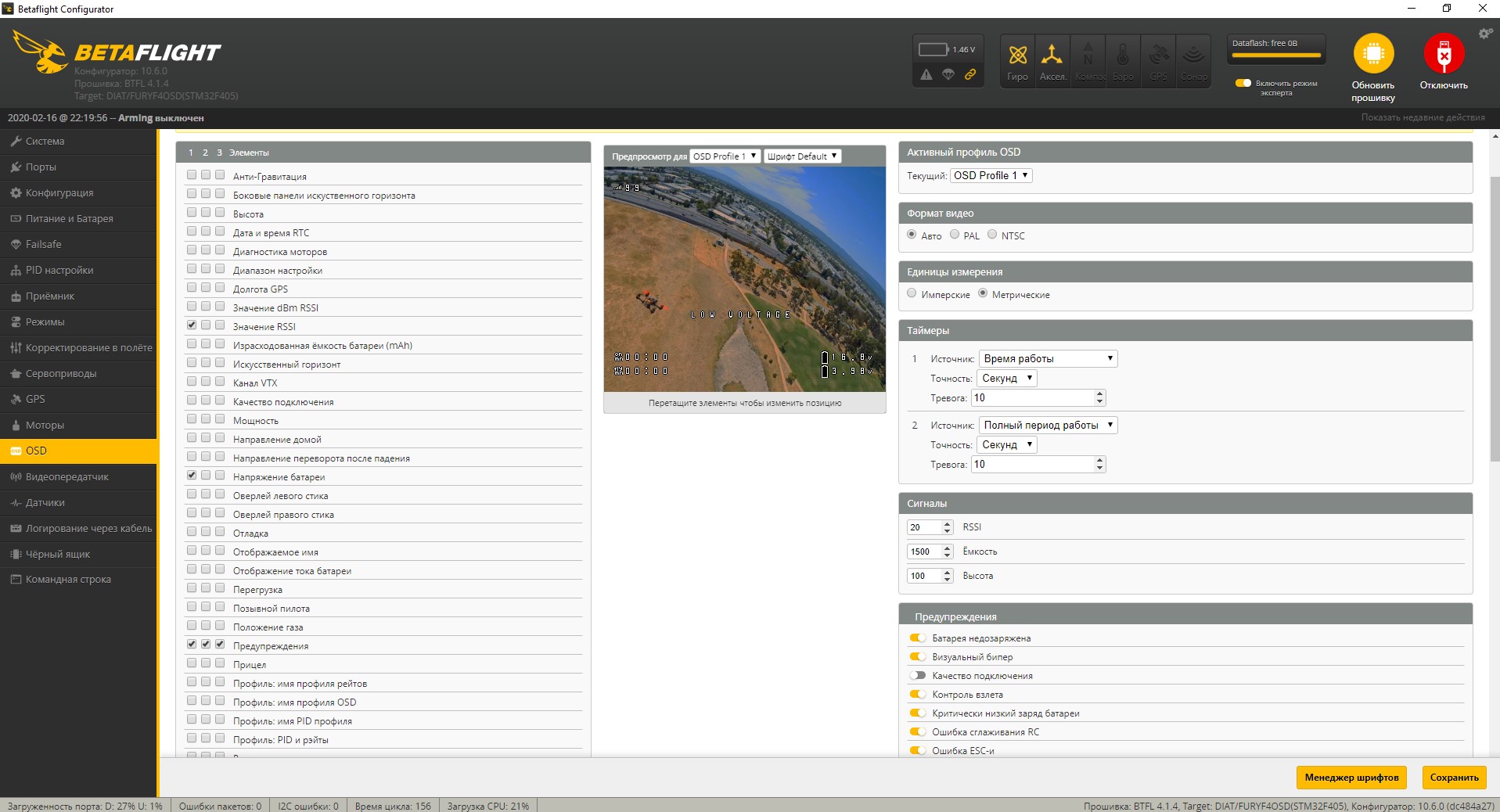
- Вкладка OSD
- Вкладка Командная строка (CLI)
- Фотографии
- Таблица компонентов и примерная цена
- Заключение
Что нужно для сборки квадрокоптера? Инструменты
Набор инструментов стандартный, но без него у вас не получится собрать квадрокоптер. И так, вам потребуется следующий инструмент для пошаговой сборки квадрокоптера:
- Паяльник;
- Припой 63/37;
- Флюс активный или нейтральный (я использую ФИМ, активный, но активный флюс надо обязательно хорошо смывать, иначе будет разъедать контакты);
- Пинцет;
- Ключи под шестигранники и головка для гаек;
- Канцелярский нож или любой инструмент для обрезки проводов и снятия изоляции;
- Термоусадка;
- Зажигалка;
- Линейка или рулетка;
- Пластиковые стяжки;
- Фиксатор резьбы синий (можно использовать и красный, но в малых количествах);
- Мультиметр для прозвонки цепи на случай короткого замыкания.

Что еще понадобится именно для этой сборки:
Вступление
Когда вышла эта камера, очень уж захотелось применить ее в обычном мини квадрокоптере, хотя предназначена они для микро дронов. Основной причиной выбора была компактность, качество видео и экономия места, потому что больше не нужно будет навешивать экшен-камеры на дрон и производить лишние манипуляции. Плюсом будет и то, что к камере можно подключаться по Wi-Fi (она создает свою точку доступа) и скачивать видео на телефон, смотреть видео с камеры в реальном времени (хоть и с задержкой), а также производить настройки.
Ну и конечно же, это камера умеет записывать видео, при этом, наверху дрона ничего не будет торчать.
Не забывайте, что пошаговая сборка квадрокоптера это творчество и не обязательно следовать инструкциям и делать так, как показано в статье. Вы можете включить фантазию и сделать иначе или вообще этого не делать. Это хобби, которое должно приносить удовольствие от конструирования, настройки — пользуйтесь этим и не ставьте себе рамки/ограничения.
Читайте также: Caddx Tarsier 4K — FPV камера с топовым разрешением и двумя объективами
Электроника квадрокоптера и другие компоненты
Инструменты перечислили, теперь нужно перечислить и компоненты, из которых собирается квадрокоптер:
- Рама;
- FPV камера (в нашем случае, а это Caddx Tarsier);
- Полетный контроллер с регуляторами оборотов 4 в 1 (там же и плата распределения питания);
- Видеопередатчик;
- Приемник;
- Аккумулятор;
- Антенна для видеопередатчика;
- Крепления для аккумулятора.
Все ссылки на компоненты вы найдете в конце статьи в виде таблицы.
Сборка квадрокоптера. Собираем дрон своими руками
Схема монтажа
Подключать все компоненты будет согласно этой схемы:
Сборка рамы
В качестве базы была выбрана классическая рама 115 мм под названием Martian. Стандартный тип — Гибридный X:

Фиолетовые стойки придают стильности и цвета сборке.
Собирается легко, в наборе идет напильник, которым можно при желании обработать углы деталей, они могут быть острыми. Сначала собирается нижняя плашка с нижними лучами.
Стойки пока не устанавливайте, так как они в дальнейшей сборке будут мешать паять провода. Я поторопился и прикрутил их, после чего снова открутил.
Здесь вам понадобится шестигранник, а также головка для гаек, чтобы затянуть нижнюю часть.
Затем, установите пластиковые стойки для установки башни из регулятора оборотов, полетного контроллера и так далее. С обратной стороны они затягиваются винтами

Для того, чтобы регуляторам оборотов было мягче «сидеть» на стойках, наденьте на них силиконовые демпферные колечки. Они идут в комплекте с рамы:

Затем, вам нужно взять регулятор оборотов, и залудить контакты, к которым будет припаивать провода двигателей. Если впервые паяете, то для начала смажьте паяльным флюсом площадки, затем возьмите припой и тут двумя способами: либо приложите проволоку припоя к контакту и расплавьте паяльником, либо расплавьте припой на жало паяльника и после этого приложите каплю к контакту. После этого установите регулятор(ы) оборотов на стойки:
Подключение моторов квадрокоптера: установка двигателей
Второй этап пошаговой сборки квадрокоптера. Раньше было популярно производить двигатели с правой и левой резьбой, чтобы в процессе полета гайки всегда самозатягивались, но в последнее время все чаще производители продают двигатели с резьбой на валу только в одну сторону. Но это совсем не проблема, так как используются контр-гайки, которые и так не будут откручиваться. Плюсом к этому будут минимальные допуски — пропеллеры садятся туго и держатся крепко даже без гаек.
Поэтому, просто покупайте сразу по 4 штуки двигателей без привязки к стороне, в которую они должны крутиться, это мы потом поправим при настройке прошивки.
Чтобы все смотрелось красиво, можно использовать оплетку жгутов или шнуров, например, вот так:

А можно использовать просто термоусадку. Будет менее красивее, но защита такая же.
В комплекте с двигателями будут идти 2 размера винтов, для толстой рамы и для тонкой рамы. Так как у этой рамы лучи толщиной 5 мм, то используйте самые длинные винты. До оплетки двигателя они не достанут.
Теперь вам потребуется фиксатор резьбы. Продается в любом магазине автозапчастей. Использовать желательно синий, но если остался красный, то просто лейте его в очень малых количествах на резьбовые соединения. Выглядит он так:

Смажьте винты и прикрутите двигатели к раме. Будьте аккуратны и не сорвите резьбу.

После того, как прикрутите двигатели, отмерьте длину проводов, которую нужно будет оставить для припаивания. Отмерять нужно на напрямую, а с учетом изгибов. Вот так:
Провода припаиваются также, как идут от двигателя — по порядку, хотя и можно нарушить порядок и поменять крайние провода местами, тогда двигатель начнет крутиться в другую сторону. А вот средний провод перепутать нельзя, он должен быть обязательно по центру и припаян к средней площадке.
После того, как отмерите, отрежьте лишнее, удалите изоляцию с концов, залудите. Отмерьте и отрежьте кусок термоусадки, либо оплетки и наденьте на провода:
Теперь все это дело нужно припаять. Прогревать надо хорошо, чтобы получился качественный контакт, иначе у вас могут возникнуть проблемы в виде того, что при запуске двигатели будут отключаться (как один из вариантов):
Затем проходим по термоусадке зажигалкой или феном для пайки, чтобы она стянулась.
Установка полетного контроллера
Пошаговая сборка квадрокоптера включает в себя установку полетного контроллера. Вам нужно припаять провода и конденсатор для подключения аккумулятора. Забыл сфотографировать этот момент, поэтому фото уже после нескольких шагов. Соблюдайте полярность. В комплекте с Mamba F405 шли короткие провода, поэтому пришлось наращивать дополнительные, чтобы хватало удобно подключать аккумулятор. Изначально припаял короткие, подумав, что будет удобно подключать, но после сборки понял, что не совсем и быстренько переделал их. Делайте так, чтобы провод выходил за раму на несколько сантиматеров. Места контактов тоже оборачиваем в термоусадку. На конденсаторе есть «+» и «-«, это все хорошо припаиваем к плате с регуляторами оборотов. Контакт должен быть хороший, поэтому, дайте припою прогреться:

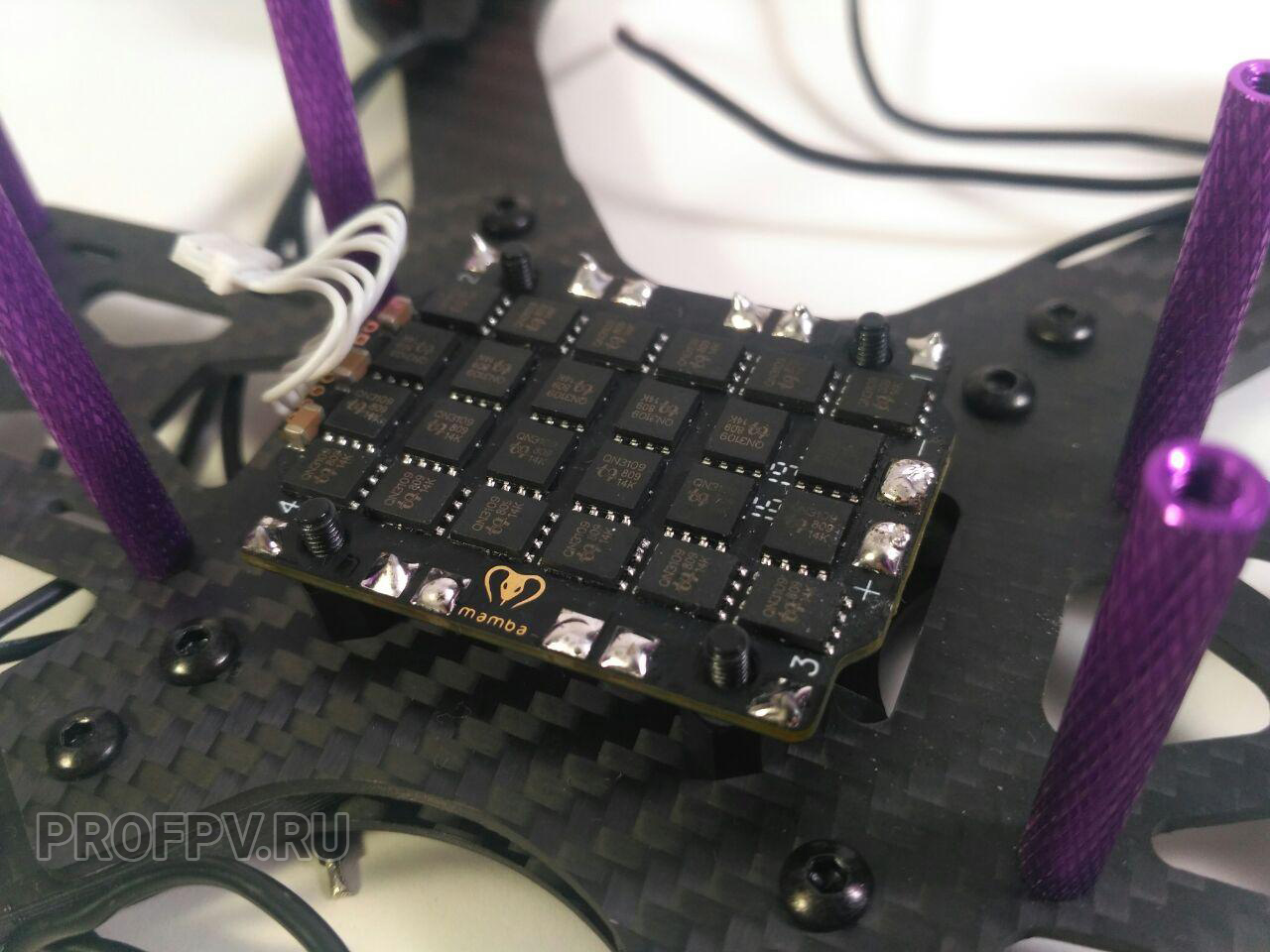
Далее устанавливаем на пластиковые стойки полетный контроллер. В комплекте идут синие демпферные амортизаторы. Они нужны, чтобы гасить вибрации и колебания, чтобы не мешать работе гироскопу. Наверх насаживаем пластиковые гайки и затягиваем, но не сильно туго. Подключаем белый коннектор от регуляторов оборотов к полетному контроллеру. Как видите, к этому этапу были убраны почти все фиолетовые стойки, потому что мешали. Не повторяйте эту ошибку и не ставьте их раньше времени:
Монтаж проводов для камеры
Далее припаиваем провода от камеры. Согласно схемы, мы можем припаять контакты к этим площадкам:


На фото выше:
- желтый провод — видео;
- черный — земля;
- красный — 5 V.
Отходящий проводок (зеленый + черный) это контакт для подключения джойстика управления камерой. Но Caddx Tarsier 4K настраивает с телефона через приложение, поэтому, если хотите, можете отрезать лишние провода.
Монтаж приемника
Приемник используется FrSky XM+.
Припаиваем к нему 3 провода:
- Белый — сигнал;
- Красный 5 V;
- Черный — земля.
Провода припаиваете как показано на фото ниже (на обратной стороне есть маркировка):
Сразу отрезаем по размеру термоусадку. В нее спрячем приемник после монтажа.
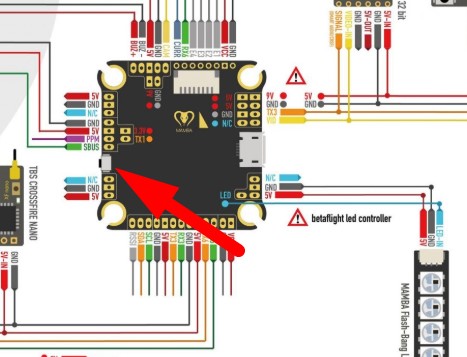
Просовываете провода под низ полетного контроллера. Припаиваемся к этим контактам:
Должно получиться вот так.
На этом этапе сборки квадрокоптера нужно привязать приемник, пока вы его не спрятали в термоусадку. Берем радио, включаем, настраиваем модельку (даем имя), ставим на строчке Ch. Range — Ch1-16, Mode D16. Доходим до вот этой строчки и нажимаем колесиком на нее: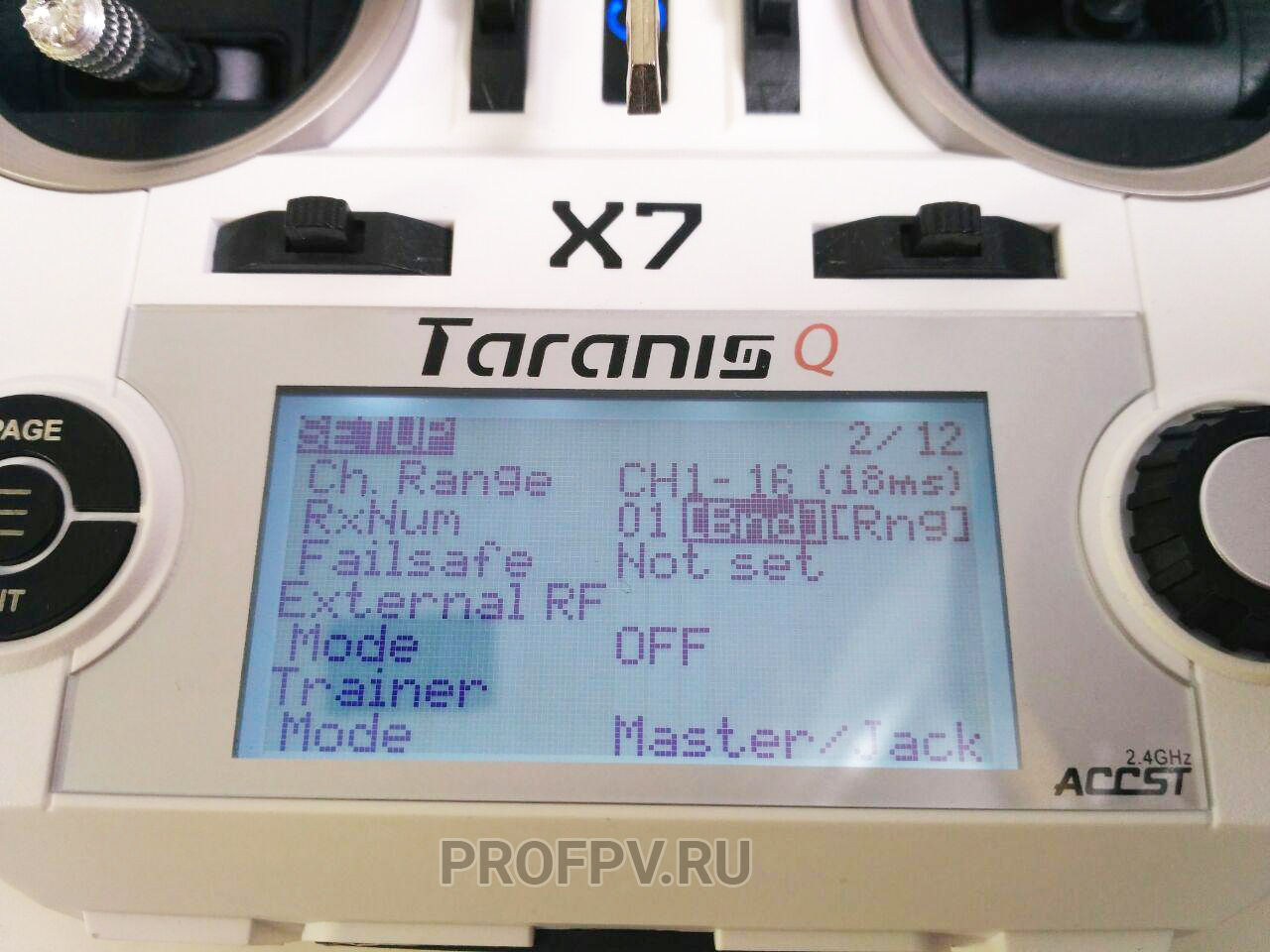
Нажимаем кнопку на приемнике, она находится сверху слева и подключаем полетный контроллер по USB к компьютеру, чтобы подать питание на приемник. Загорится зеленый светодиод, а красный будет моргать. Теперь отпускаем кнопку и снова нажимаем на аппаратуре колесиком на BND, чтобы выйти из режима привязки.
Все, вы успешно привязал приемник.
Надеваем термоусадку, усаживаем ее и заталкиваем приемник под полетный контроллер. Снаружи оставляем антенны. Мы их прикрепим к лучам рамы. Обязательное условие хорошего сигнала: антенны (если их 2), должны составлять угол 90 градусов между собой.
Чтобы у нас все получилось, берем 2 пластиковые стяжки и крепим их таким образом на лучи рамы:

Отрезаем по размеру термоусадку и надеваем. Затем усаживаем зажигалкой или феном:


Получится вот такое:

Таким образом, у вас получится идеальный угол в 90 градусов, а сами антенны прочно закреплены.
Установка видеопередатчика и пищалки
Сборка FPV квадрокоптера не обойдется без видео. Видеопередатчик используется классический: Echine TX528 и мы подключаем его к полетному контроллеру. Если провода у видеопередатчика длинные, то укорачиваем их до той длины, чтобы можно было прикрепить видеопередатчик к краю верхней планки рамы и провода не висели. Чтобы минимизировать помехи в видео, провода скручиваем в жгут. По схеме, мы можем припаиваться к этим контактам:

Пищалку припаиваем рядом с контактами на камеру. Пищалка нужна для звукового сопровождения различных уведомлений, а также для поиска упавшего квадрокоптера. В общем, это необходимая вещь. Пищалки нужны с встроенным генератором. Провода (черный и красный) припаиваем сюда:
Провода пищалки также просовываем под полетным контроллером. На выходе с задней стороны, привязываем пищалку и кабель питания пластиковой стяжкой к раме.
Видеопередатчик крепим пластиковыми стяжками к верхней панели, попутно прикрутив антенну:
Монтаж Caddx Tarsier 4K в стэк, в башню
Пошаговая сборка квадрокоптера своими руками включает самое интересно — монтаж платы камеры в стэк к полетному контроллеру и регуляторам оборотов, а также монтаж модуля камеры на распечатанные на 3D принтере переходники.
Начнем с переходников. Вставляем в них маленькие гайки М2:
Прикручиваем эти переходники к камере винтами подходящего размера на 6 или 8 мм, чтобы все держалось крепко:

Берем боковые панельки, на которые будем закреплять камеру. Берем сверло на 2, примеряем (чтобы камера была по середине) и сверлим по 2 отверстия для крепления переходников, но мне хватило 1 отверстия, так как второе попало ровно в готовое отверстие (решетка):
Теперь переходим к креплению самой платы на башню. Так как плата камеры имеет размер 29 * 29 мм, а монтажные отверстия 20 * 20 мм, то естественно просто так ее не установить. Поэтому, было решено взять информационную панельку от Mamba F405, просверлить сверлом на 2 мм 4 отверстия, закрепить плату и все то дело установить на стандартные 30 * 30 мм. Винты нужны будут также М2 на 12 мм из набора.
Металлическая панелька с синей резиной — это радиатор платы камеры.
Нужно сместить все в одну сторону, иначе потом не закрутите гайками саму панель.
В итоге, получилась вот такая композиция:
Гайки влезут только с одной стороны, но держаться будет все крепко, проверенно неоднократными полетами и падениями на этом дроне. Не забудьте подложить резиновые колечки из набора полетного контроллера (их там много).
Остается смонтировать панельки к переходникам камеры. Откручиваем камеру от переходников, прикручиваем переходники к панелькам и снова закручиваем камеру к переходникам. Устанавливаем на место:


Крепим верхнюю панель к раме:
Последние штрихи
Аккумулятор в этой сборке квадрокоптера будет крепиться сверху. Так как там шляпки винтов, то нам необходимо сгладить эту поверхность. Для этих целей был выбран кусок резины (камера от велосипеда) и 2 полоски двустороннего скотча:

В сборке FPV квадрокоптера можно применить любой материал, помните, этот квадрокоптер собираете вы сами и так, как вы хотите, поэтому используйте фантазию, не обязательно следовать тому, как показано здесь.
Итоговый вид квадрокоптера:
На этом с технической частью закончено и пора переходить к программной: прошивка и настройка!
Прошивка и настройка квадрокоптера после сборки своими руками
После сборки квадрокоптера, переходим к настройке и прошивке квадрокоптера. Вам понадобится:
- Betaflight Configurator;
- BLHeliSuite;
- Кабель USB — microUSB.
Скачать Betaflight Configurator и BLHeliSuite можно на этой странице: Как и где скачать Betaflight Configurator и BLHeli
Если при подключении квадрокоптера к компьютеру он не видит полетный контроллер, то вам нужно сделать следующее:
- Качаем по ссылке https://www.st.com/en/development-tools/stsw-stm32102.html STM32 Virtual COM Port Driver — там нужно согласиться на использование драйвера и ввести свою почту, на которую придет ссылка для скачивания. Без этого драйвера вы не подключитесь ни к одному конфигуратору. Устанавливаем драйвер. Откройте файл Readme в архиве — там написано в разделе «How to use», чтобывы зашли в директорию установки и запустили файл dpinst_x86.exe или dpinst_amd64.exe.
- Если это не помогло и вы намудрили с драйверами, попробуйте поставить прошлую версию драйвера. Более подробно в статье:
Taranis не определяется в симуляторе, настройки USB и JOYSTICK
Прошивка регуляторов оборотов в BLHeliSuite
Сначала нам нужно открыть BLHeliSuite и прошить регуляторы оборотов. На нужна версия без 32 и на момент опубликования, она называлась BLHeliSuite16714901.
Запускаем и открываем. Сверху выбираем для Cleanflight:
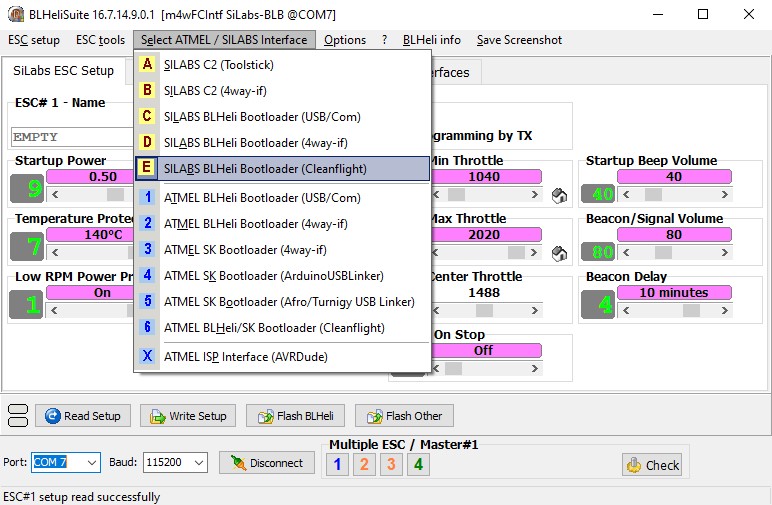
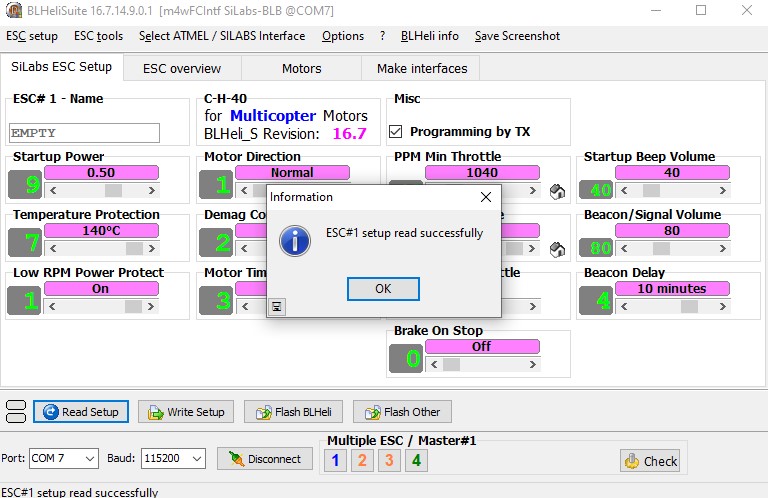
Внизу выбираем нужный порт (чтобы узнать какой, подсоедините USB к полетному контроллеру и посмотрите, какой порт появился в списке. Это же можно посмотреть и в диспетчере устройств) и нажимаем Read Setup, чтобы прочитать настройки.
Не забудьте снять пропеллеры!
Программа скажет, что настройки прочитаны успешно:
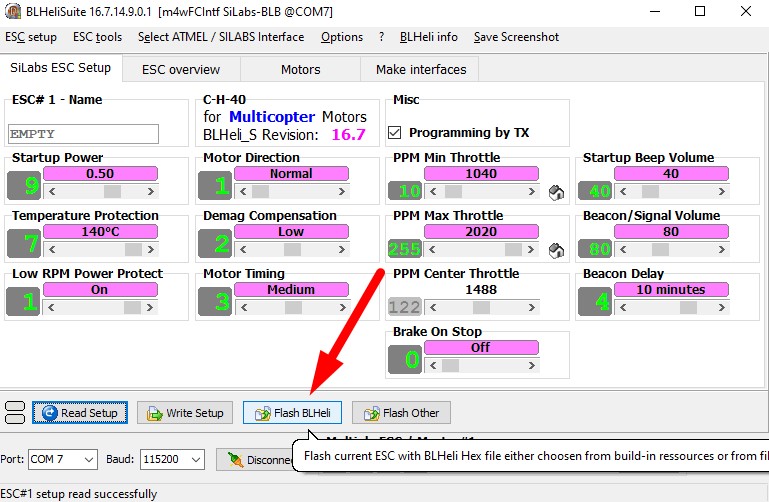
Нажимаем Flash BLHeli:
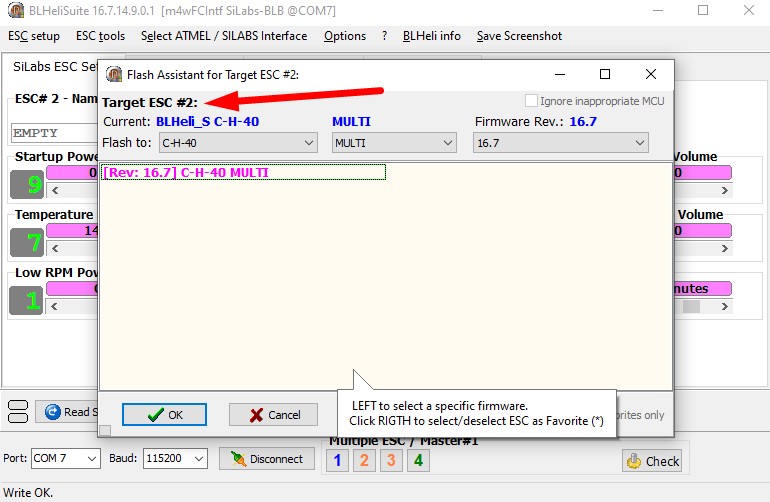
Далее вам система предложит выбрать версию прошивки и прочие схемы, везде соглашаемся и ничего не меняем:
В конце программа предложит прошить второй регулятор оборотов. Делаем все тоже самое, так как их 4 штуки:
В конце программа сообщит, что все 4 регулятора оборотов прошиты:
В этой же программе можно будет менять направление вращения моторов, это нужно, чтобы квадрокоптер смог летать. Вращаться они должны по такой схеме:
В этой программе вы также сможете настраивать музыку, которая звучит при включении и сочинять свою. Программа для тонкой настройки регуляторов оборотов. Но если вам не хочется разбираться в настройках и просто нужно прошить регуляторы, то вам подойдет простое приложение — BLHeli Configurator.
Для простой прошивки регуляторов, читайте статью: Как прошить полетный контроллер и ESC BLhelli. Прошивка квадрокоптера
Здесь все гораздо проще и интуитивно понятно.
Прошиваем полетный контроллер в Betaflight Configurator
Зажимаем кнопки BOOT на полетном контроллере и подключаем к компьютеру через USB-кабель.
Открываем Betaflight и переходим на вкладку «Программатор» и выбираем цель и версию прошивки. Выбираем в первой строчке FURYF4OSD (DIAT) и самую последнюю (новую) версию прошивки. Остальное не трогаем. Потом нажимаем «Загрузить прошивку онлайн»:
После того, как скачалась прошивка, жмем «Загрузить прошивку«:
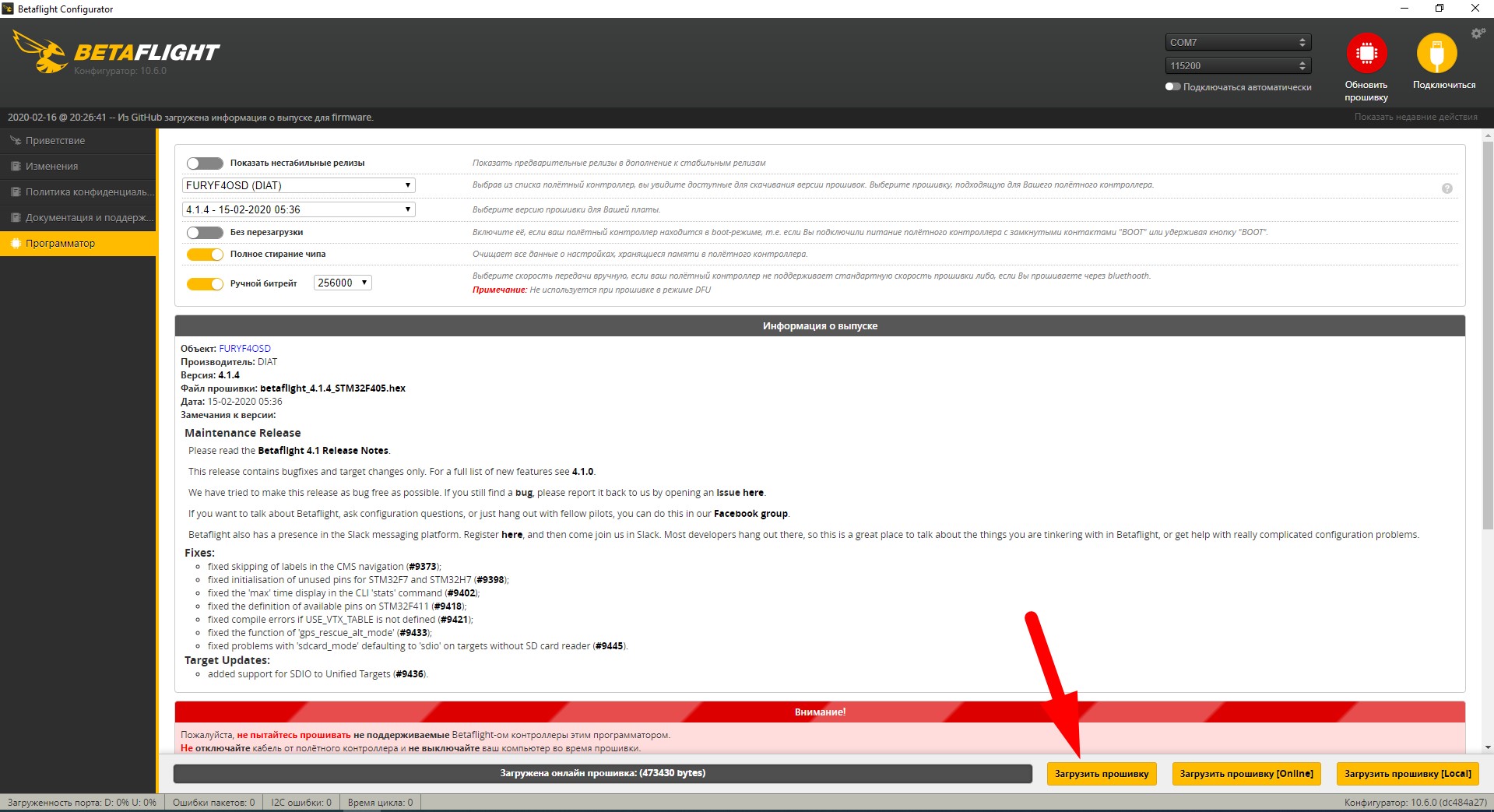
Начнется процесс прошивки, после окончания можно нажать кнопку «Подключиться» в верхнем правом углу.
Вкладка Система
На главном экране калибруем акселерометр:
Вкладка Порты
На UART1 ставим Serial RX — это порт для приемника.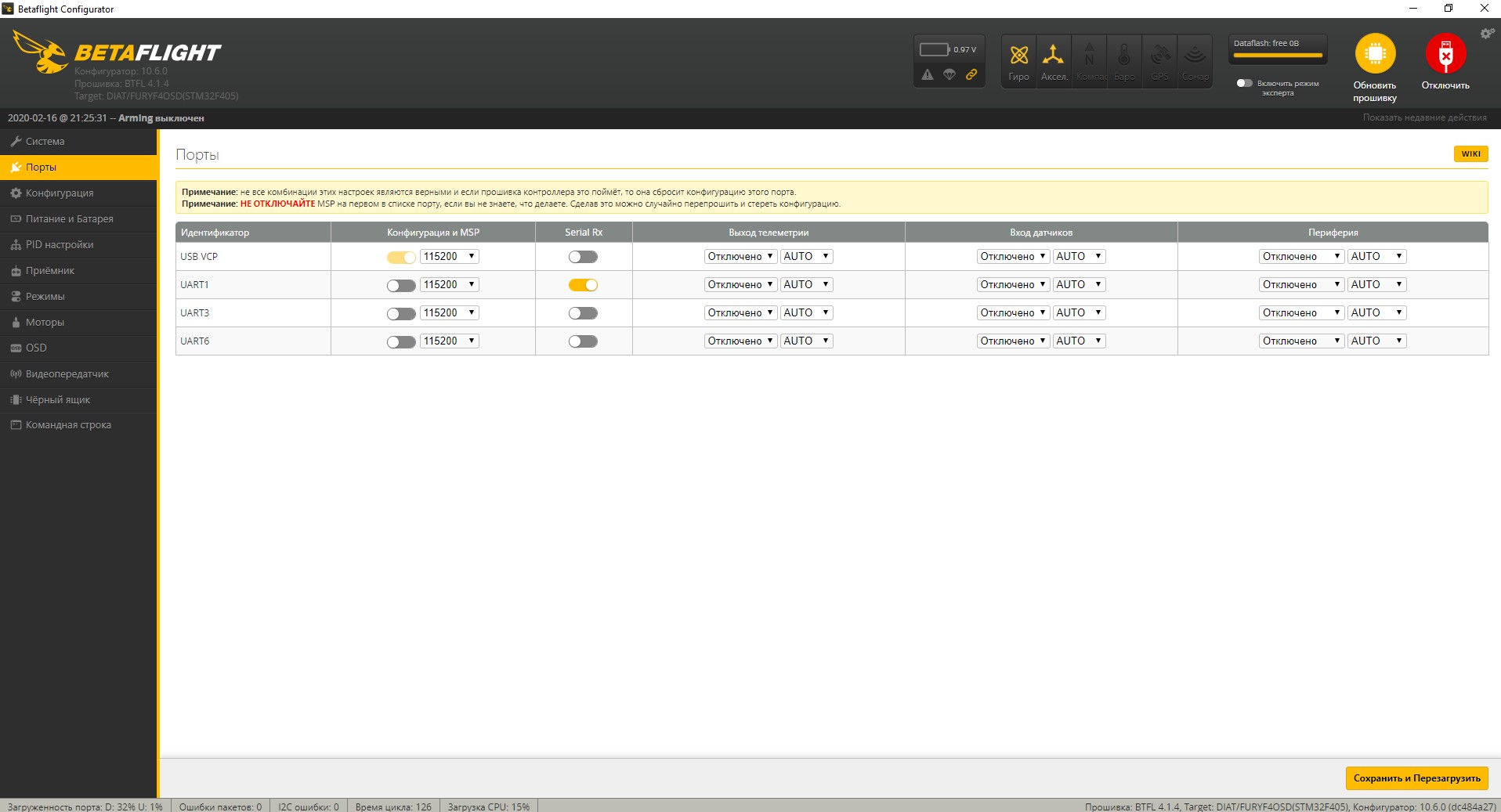
Жмем «Сохранить и перезагрузить«.
Вкладка Конфигурация
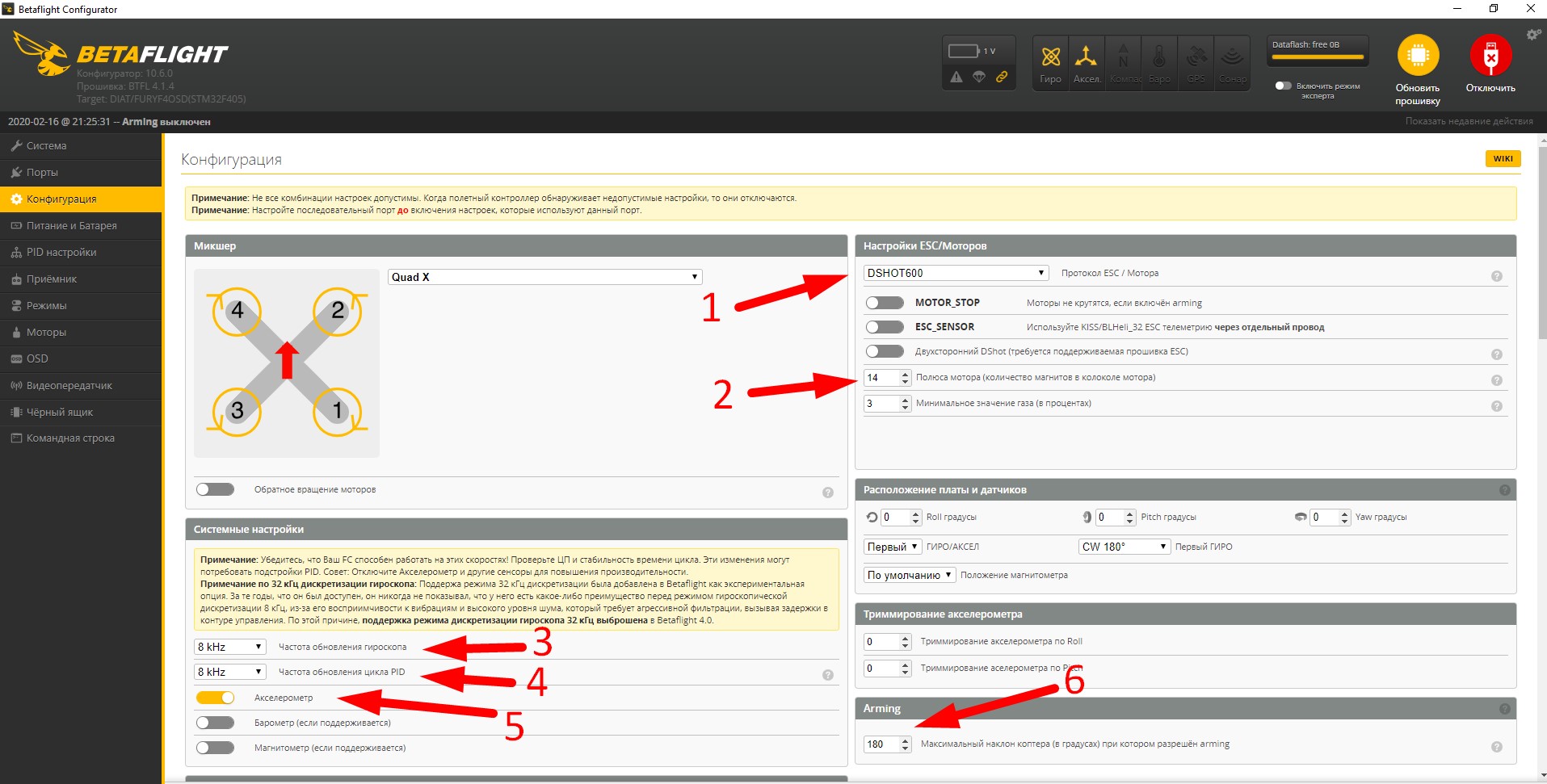
Что на изображениях:
- Протокол для общения Полетный контроллер — регуляторы оборотов: ставим DSHOT600;
- У моторов в сборке 14 магнитов в колоколе. Если вы используете другие двигатели, то считайте;
- Частота обновления гироскопа. Ставим 8kHz;
- Частота обновления ПИДов: ставим 8kHz;
- Включаем акселерометр;
- Максимальный наклон квадрокоптера. Ставим 180, тогда вы сможете заармить дрон почти в любом положении.
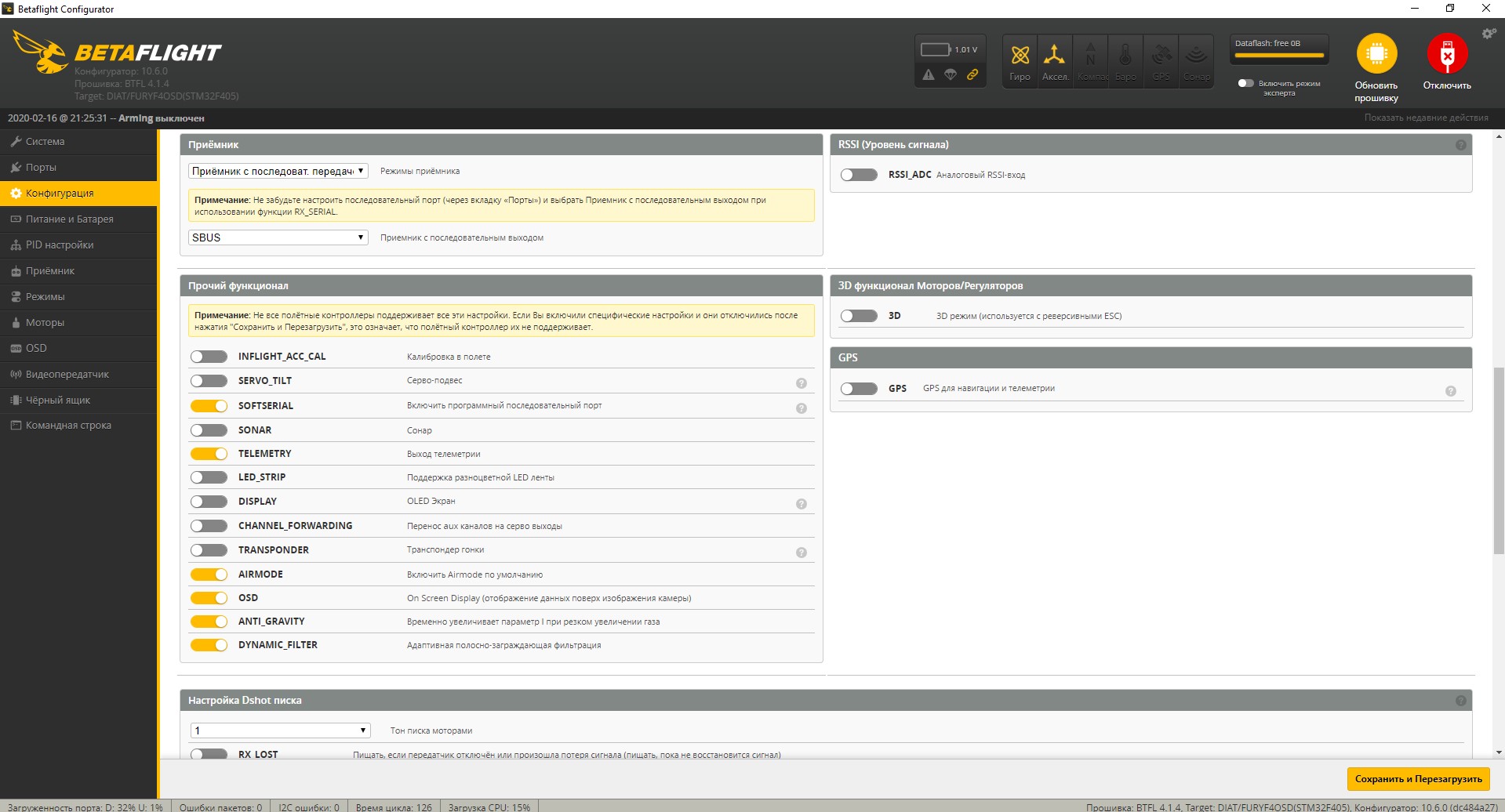
Блок «Приемник»: здесь выбираем строчку «Приемник с последовательной передачей данных«. Ниже выбираем «SBUS«, так как приемник у нас работает на этом протоколе.
Блок «Прочий функционал»: включаем строчки, как на скрине. Если планируете подключить адресную светодиодную ленту, то включаем и LED_STRIP. Остальное включается под индивидуальные задачи и сейчас их включать не требуется.
Жмем «Сохранить и перезагрузить«.
Вкладка Питание и батарея
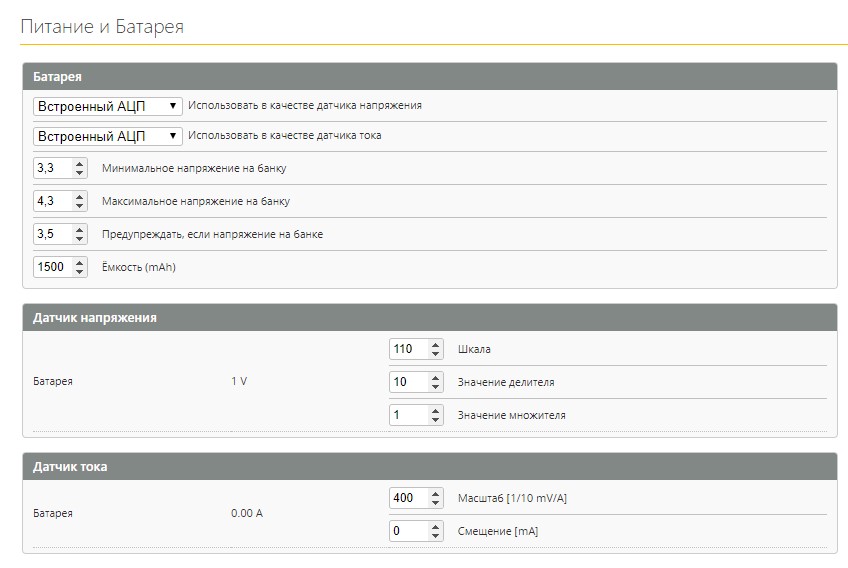
Здесь все стандартно — просто настраиваем характеристики ваших аккумуляторов.
Жмем «Сохранить и перезагрузить«.
Вкладка Приемник
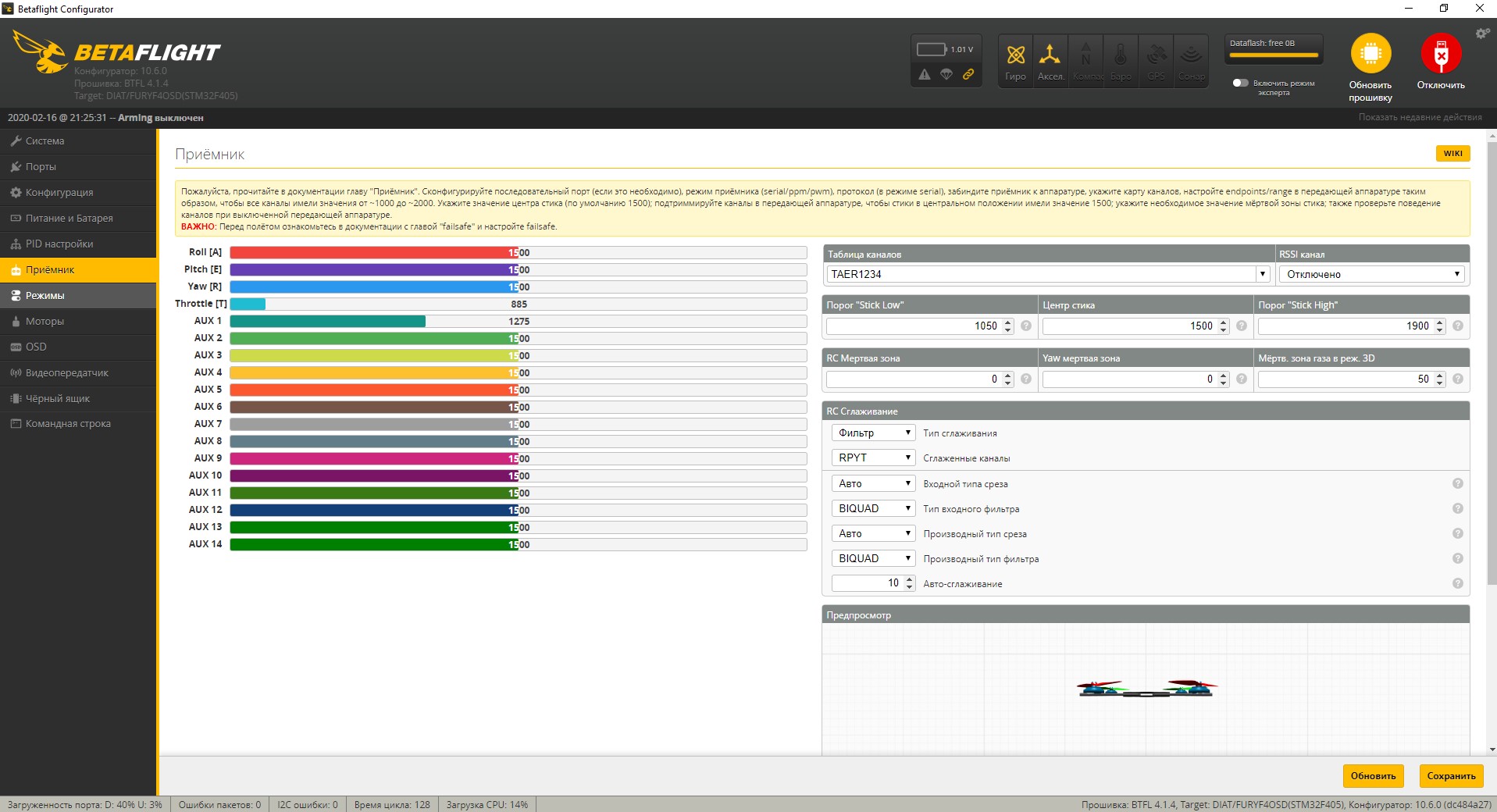
Таблица каналов выбирается и прописывается исходя из таблицы каналов вашей аппаратуры. Данный дрон управляется с помощью аппаратуры управления Taranis QX7 и у него по умолчанию таблица TAER1234. Ее можно менять непосредственно в самой аппаратуре.
Читайте также: Обзор FrSky Taranis QX7
Для проверки, что все работает: подключаем аккумулятор и аппаратуру управления. Двигаем всеми стиками и тумблерами в разные стороны. Разноцветные полоски должны реагировать на каждое движение элементов пульта.
Если вы используете аппаратуру Taranis, то скорее всего у вас тут не будут реагировать тумблеры. Для этого нужно зайти в меню, дойти до MIXER и назначить каналу тумблер. Подробнее, как это сделать на видео ниже:
После этого, у вас начнет отображаться 5 канал в Betaflight и будет реагировать на переключения.
Вкладка Режимы
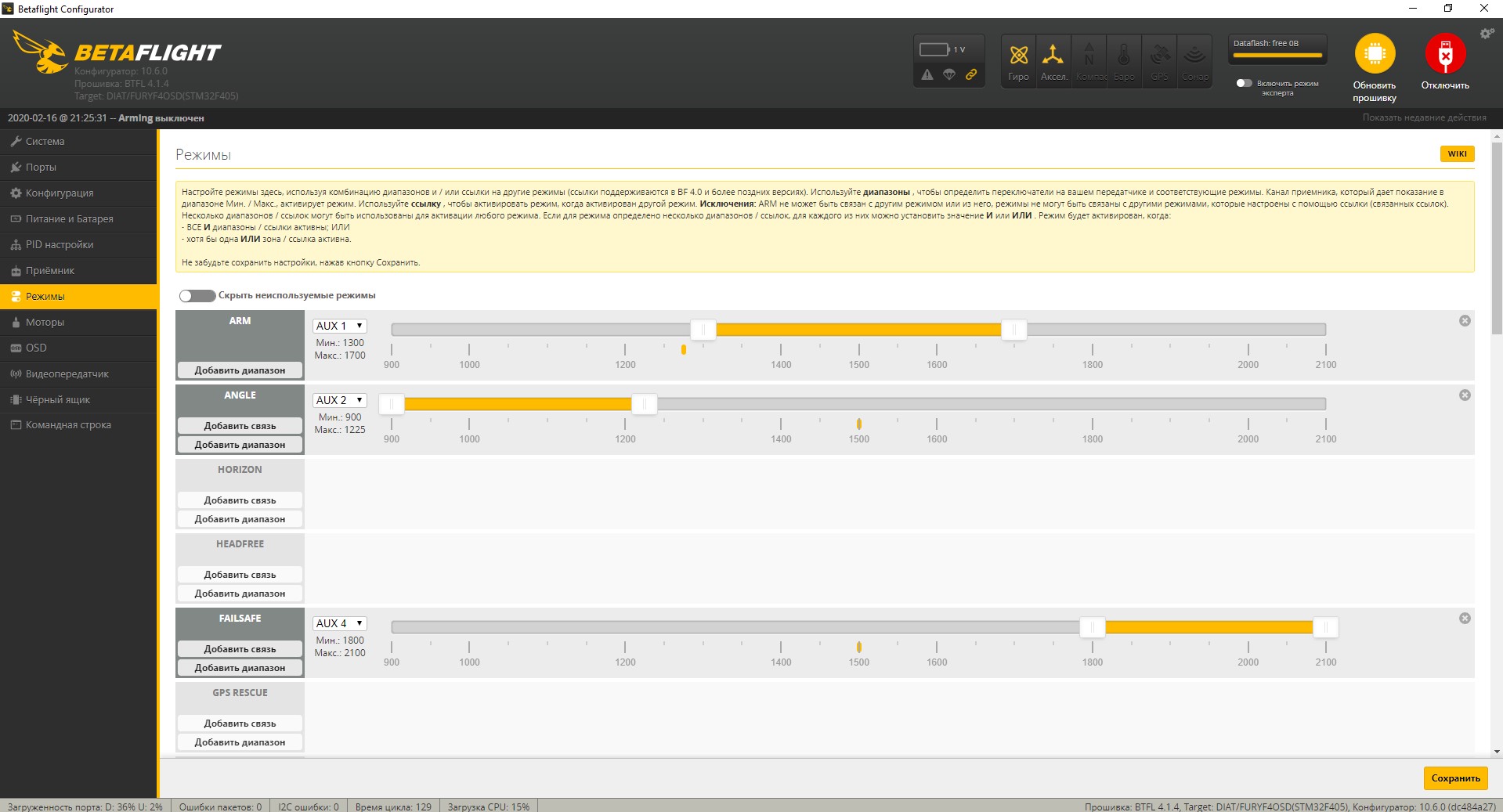
Здесь настраиваются тумблеры на ваше усмотрение. Например, заармить дрон настроено на тумблер 1, а режимы (стабилизация и АКРО) на 2 тумблер. Таким образом, когда включается тумблер 1, сразу включается режим стабилизации:

Жмем «Сохранить«.
Вкладка Моторы
Здесь нам нужно проверить направление моторов. Переключаем тумблер 1 и по очереди поднимаем ползунок каждого двигателя, перед этим подключив аккумулятор и обязательно сняв пропеллеры. Если все хорошо и каждый мотор крутится в свою сторону (как показано на схеме выше), то приступаем к калибровке, если нет, то заходим в BLHeli и меняем направление на Reversed.
При использовании протоколов DSHOT, калибровку делать нет необходимости. Но если вы используете, например, Multishot, то калибровка нужна.
Калибровка:
- Переключаем тумблер 1;
- Отключаем аккумулятор;
- Поднимаем ползунок 2 на самый верх;
- Подключаем аккумулятор — регуляторы пропищат;
- Резко переводим ползунок в нижнее положение — регуляторы снова пропищат;
- Переподключаем аккумулятор.
Вкладка OSD
Для этой сборки настроены такие параметры OSD, но вы можете устанавливать любые:
Вкладка Командная строка (CLI)
Здесь сохраняем все наши настройки командой DUMP:
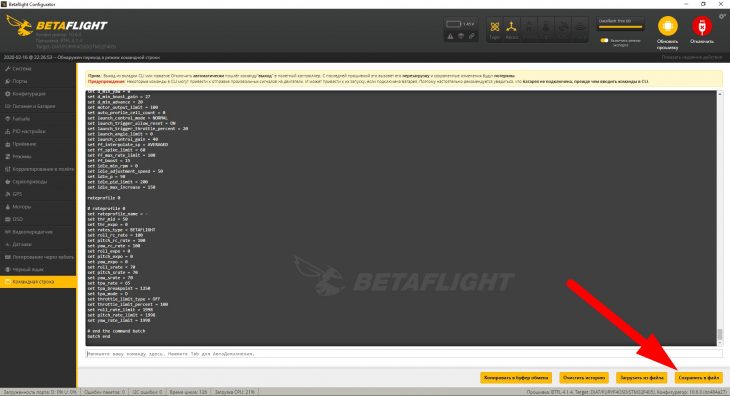
И сохраняем в файл.
Подробнее о командной строке: CLI: командная строка Betaflight — как сделать бекап и посмотреть настройки, а также команды
Вот и все, ваш квадрокоптер готов к полету!
Фотографии
Таблица компонентов и примерная цена
Дешевле и проще заказать компоненты на Banggood. Все пришло быстро и в срок, без брака.
| Компонент | Название | Ссылка | Цена ~ |
| Рама |
Martian 215 |
Banggood | Aliexpress | 21.83$ |
| Полетный контроллер с регуляторами оборотов 4 в 1 | MAMBA F405 MK2 | Banggood | Aliexpress | 42$ |
| Моторы |
Racerstar 2306 BR2306S Fire Edition 2400KV |
Banggood | Aliexpress | 38$/комплект |
| Пропеллеры |
HQProp 5045 |
Banggood | Aliexpress | 3$ |
| FPV камера |
Caddx Tarsier 4K |
Banggood | Aliexpress | 90$ |
| Антенна |
Foxeer 5.8G Lollipop (RP-SMA Male) |
Banggood | Aliexpress | 20$/2 шт. |
| Приемник | Frsky XM+ Plus Micro | Banggood | Aliexpress | 13$ |
| FPV шлем или очки | — | FPV шлем и FPV очки, что это и как работает | |
| Зарядное устройство | — | Как выбрать зарядное устройство LiPo для квадрокоптера? Советы и примеры | |
| Аккумуляторы | AHTECH Infinity 4S 85C (в карточке товара нужно выбрать Цвет: 1500mah 4S 85C) | Banggood | Aliexpress | 25$ |
| Видеопередатчик |
Eachine TS5828L (можно использовать любой другой) |
Banggood | Aliexpress
Альтернатива, с антенной SMA на Banggood и/или RP-SMA на Ali: |
7-8$ |
| Набор винтов и гаек | Здесь следует выбирать наборы М2! Другие не подойдут. | Banggood | Aliexpress | 7-10$ |
| Переходник с маленькой камеры, на большую |
Fixed Mount TPU |
Banggood | Aliexpress Ссылка на 3D-модель: ТЫК |
3$ |
| Аппаратура управления | — | Аппаратура управления квадрокоптером, какая бывает и как выбрать | |
| Паяльник | — | Banggood | Aliexpress | 6.53$ |
| Ключ для закручивания гаек пропеллеров | — | Banggood | Aliexpress | 3.89$ |
| Припой 63/37 | Kaina | Banggood | Aliexpress | 2.95$ |
| Оплетка для проводов | — | Aliexpress | 1.59$ |
| Пищалка | — | Banggood | Aliexpress | 3$/10 шт. |
| Термоусадка | — | Banggood | Aliexpress | 0.15$/1 метр |
Заключение

Сергей
Пилот как съемочного, так и гоночного квадрокоптеров
Задать вопрос
Такой квадрокоптер получился по итогу сборки. К нему планируется прикрутить еще и GPS для включения функции Возврат домой — такая функция появилась в последней версии Betaflight (Filesafe).
Главной целью сборки было, конечно же, прикрутить FPV камеру Caddx Tarsier 4K, ради которой все и затевалось.
Качество видео записывающей камеры отличное. Качество FPV камеры тоже на высоком уровне, также, удивило то, какая хорошая картинка в сумерки, будто с ночным зрением летаешь.
Видео с полетов будет позже.
Если у вас остались вопросы по сборке fpv квадрокоптера: задавайте, с радостью ответим!
Здравствуйте, уважаемые читатели! В этой статье хочу поделиться материалом по сборке FPV квадрокоптера на базе рамы, рассчитанной на установку пятидюймовых пропеллеров – Realacc Kylin 210. Главная особенность данной рамы – беспроблемное крепление бюджетных экшн камер типа Xiaomi YI и ей подобных.
Эта статья рассказывает о том, как сделать квадрокоптер своими руками из готового набора рамы, а так же про установку электроники на дрон.
Поставляется комплект рамы Realacc Kylin 210 в обычном полиэтиленовом пакете, все элементы рамы просто ссыпаны в одну кучу.
Комплектация
Основание рамы.

Карбоновые детали верхней «надстройки».

Металлические стойки.

Комплект металлического и пластикового крепежа.

Комплект для крепления аккумулятора.

Простенькая PDB с бэками на 5 и 12 вольт.
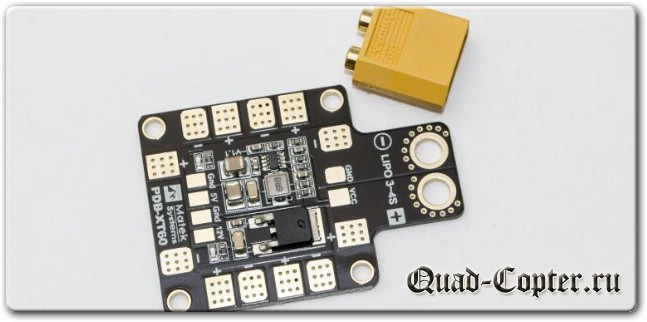
Диагональ по центрам моторов – 210 мм. Что ясно из названия рамы – Realacc Kylin 210.

Форма основания – вытянутый крест, в длину рама на 8 мм больше чем в ширину.

Толщина основания – 5,3 мм. Рама очень жесткая на прогиб, это очень хорошо.

Ширина лучей – 13 мм, этого вполне достаточно для размещения отдельных регуляторов на каждый мотор.

Остальные карбоновые детали толщиной – 2 мм. Кроме верхней деки и проставки в креплении экшн камеры, они толщиной – 1.5 мм.
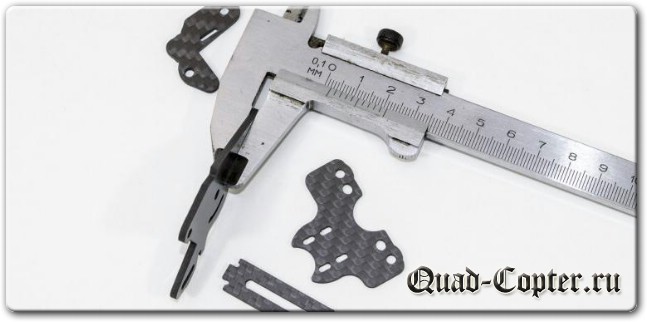
Распил ровный, без видимых косяков и задиров слоя.


На резе хорошо видна структура слоев китайского псевдокарбона. Обычно это два или три слоя углеткани, остальное текстолит. Так, и цена соответствует качеству материала.

Рама собирается за несколько минут. Сначала собираем верхушку рамы с креплением для курсовой и экшн камеры.


На основание рамы прикручиваем комплектные стойки.

Прикручиваем верхнюю часть рамы к стойкам. Рама готова.

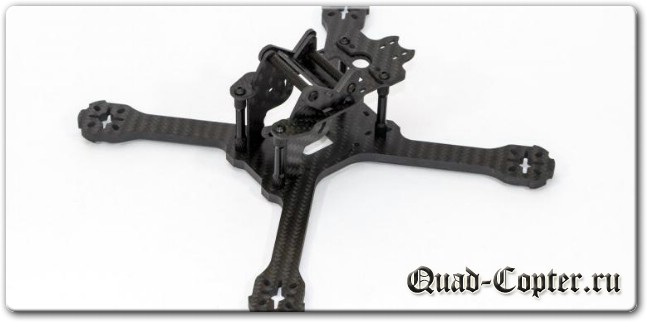
Вес пустой рамы – 94 г.

Для сборки квадрика, кроме вышеупомянутой рамы буду использовать: приемник – FrSky XSR для аппаратуры TARANIS; курсовую камеру (можно использовать любую на ваш выбор) – Foxeer HS1177 V2.
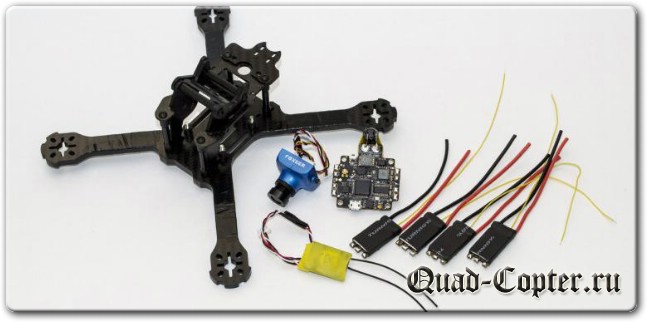
Полетник с интегрированной PDB и видеопередатчиком – HGLRC F4 V5PRO. На данный момент данный контроллер снят с производства и его прямой наследник – HGLRC F4 V6PRO. Крепление 30.5×30.5 мм.
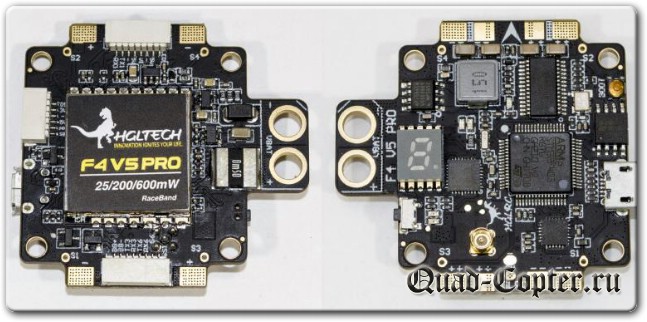
Четыре регулятора оборотов для бесколлекторных моторов с поддержкой протокола D-Shot 600 — Racerstar RS40A V2.
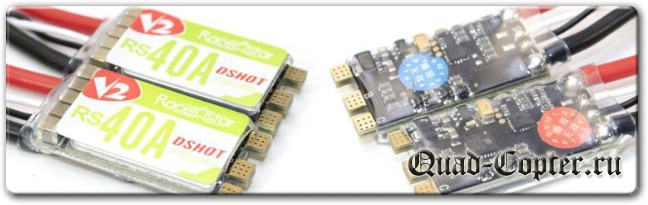
Комплект из четырех бюджетных моторов – Racerstar Racing Edition BR2205 2600KV.

Приступим к сборке коптера. Полетный контроллер установлю на стойки с виброразвязкой – Flight Controller Anti-Vibration Fixed Screws.

Пришлось подложить шайбы, чтобы притянуть стойки к раме.

Перед сборкой все острые кромки рамы я скруглил надфилем, а торцы покрыл несколькими слоями акрилового лака (можно клеем на основе цианакрилата).
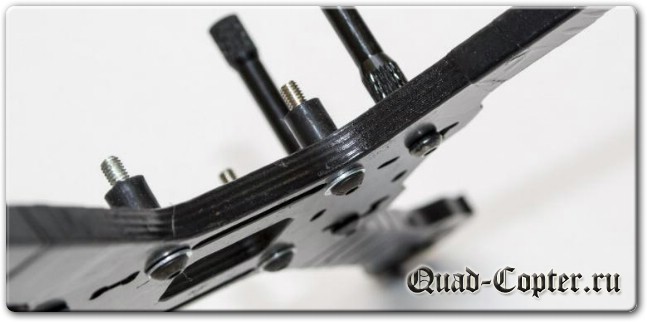
Изолирую лучи одним слоем изоленты, на случай, если он лопнет, и куски карбона могут замкнуть контакты регулятора.

К основанию рамы прикручиваем все четыре мотора. Я креплю мотор на все четыре болта, хотя можно и на два, если с фиксатором резьбы.
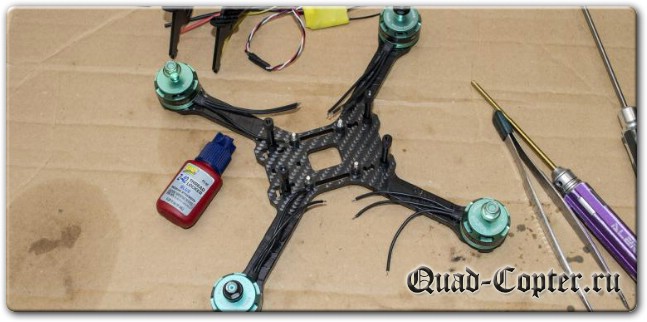


Чтобы в полете ничего само не открутилось – использую фиксатор резьбы.

Прикручиваем полетный контроллер к стойкам.
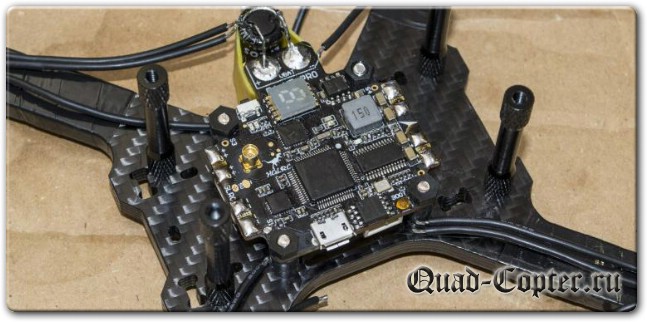
Закрепляем регуляторы на лучах парой оборотов изоленты, это необходимо для того, чтобы определить конечную длину проводов.
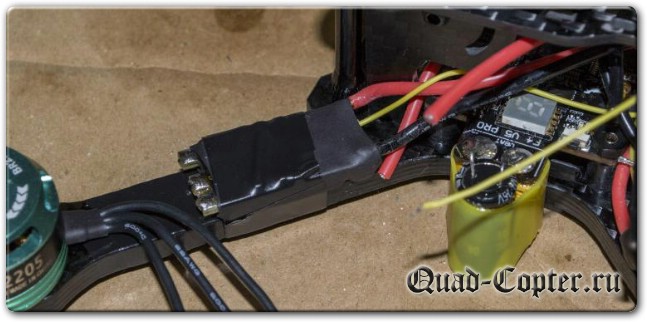

Согласно инструкции на полетный контроллер, паяем силовые и сигнальные провода от регуляторов на плату контроллера.
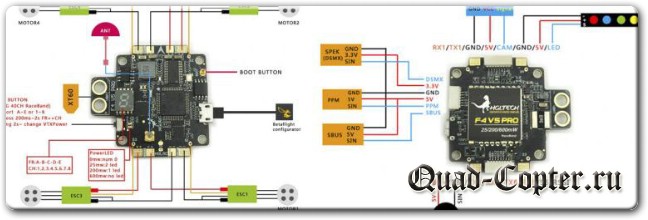

Паяем провода от моторов к регуляторам. К каким фазам, какой провод подключать значения особого не имеет и влияет только на направление вращения моторов. На этапе настройки можно поменять направление вращения моторов в программе blhelisuite.

Проверяем качество пайки, чтобы в полете ничего не отвалилось.

Рекомендую после пайки все соединения заизолировать специальным лаком, я использую несколько слоев plastik 71 и подсушиваю феном.

К полетнику подключаем все компоненты, включая антенну (без антенны сгорит видеопередатчик) и проверяем на работоспособность. Убедились, что все работает – можно окончательно заканчивать сборку и прикрутить верхнюю часть рамы к основанию. В процесс настройки полетного контроллера подробно вдаваться не буду, кому интересно можете подробно ознакомиться в этой статье – «Собираем и настраиваем квадрокоптер на базе комплекта – AuroraRC C2 Flytower OMVT F4», в разделе настройка.
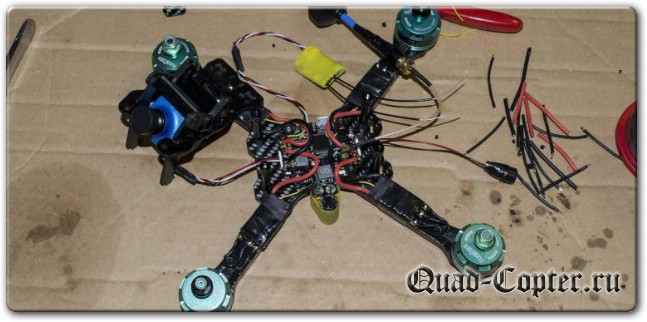
На верхней деке есть отверстие для установки SMA разъема, к которому будет прикручиваться антенна. Для полетов вокруг да около такая антенна не нужна, и будет место для приемника.


Установлю вот такой диполь (Original MMCX 5.8GHG 3dBi FPV Antenna) с разъемом MMCX как раз подходит к полетнику.
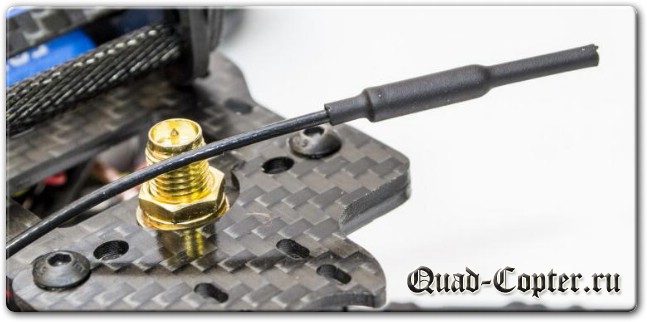
Окончание антенны дополнительно усилю вторым слоем термоусадки.

На освободившееся место стяжками закрепляем приемник.
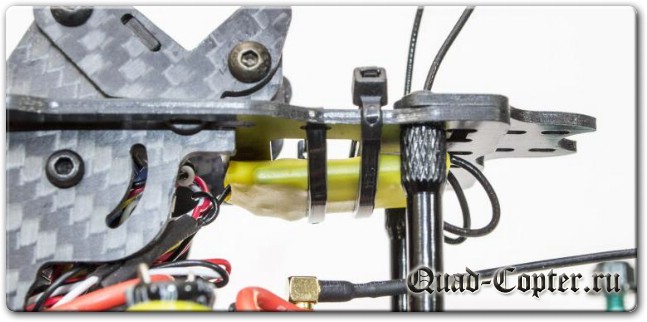
Усы антенн выводим за пределы рамы и закрепляем на обрезанных стяжках с помощью термоусадки. Угол в 90 градусов между лучами антенн не выдержан, но оно и так нормально работает на удалении до 200 метров.


Фиксируем антенну видеопередатчика.
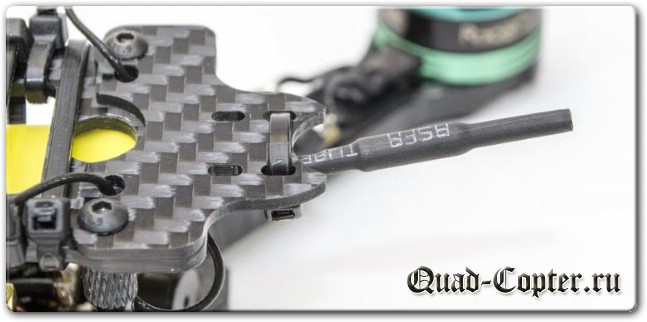
Про пищалку тоже не забыл, притянул стяжкой к основанию рамы.
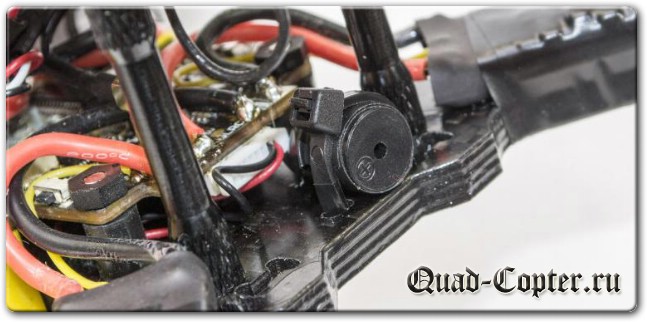
С помощью пинцета и какой-то матери, в пазы основания рамы продеваем стяжку-велкро для фиксации аккумуляторов. Для этой операции нужен пинцет с тонкими и изогнутыми губками, иначе намучаетесь.

Для более надежной фиксации акума на раме, использую липучку типа репейник (крючки на раме). Но можно установить прилагаемую к комплекту рамы прокладку из пенорезины. Как по мне – липучка надежней и не надо потом лазить на корячках по всему полю и искать куда отлетел акум при падении и ударе об землю.
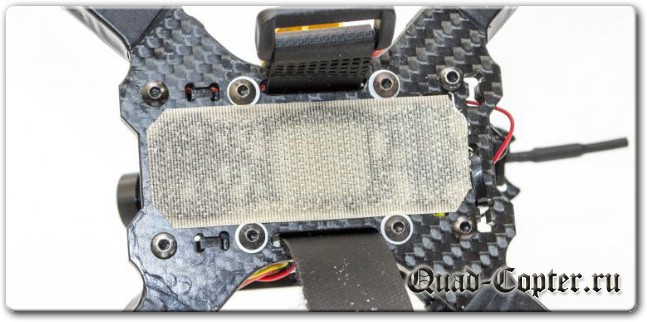


Последний штрих – окончательно фиксируем регуляторы на лучах рамы, кто-то это делает стяжками, я обычно просто приматываю изолентой.
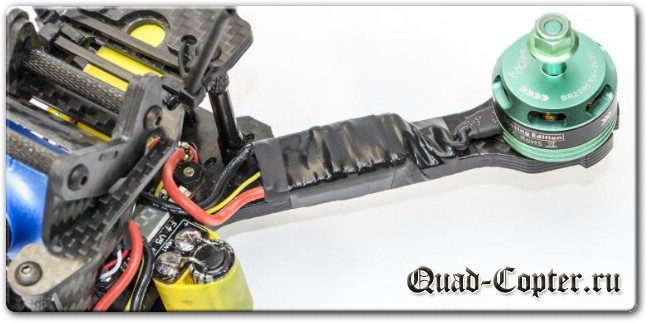
В итоге получилось:


Вес квадрика с пропами «трешками» – 332 г

Вес с акумом 4S 1300 mAh – 486 г.

Немного хочу рассказать об особенностях рамы Realacc Kylin 210. Ширина проема для установки FPV камеры 27.8 мм, и рассчитана на крепление камер через силиконовые демпферы, у меня таковых нет, подложил попавшиеся под руку шайбы.
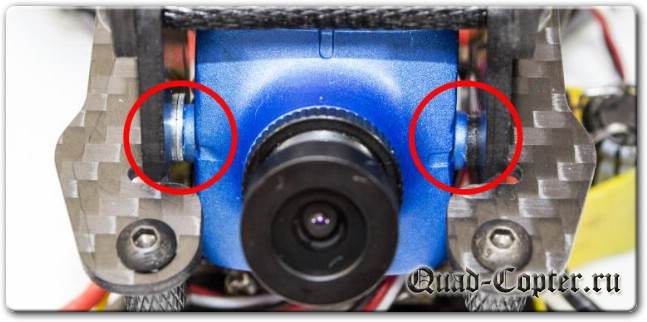
Боковые карбоновые пластины не дадут установить стек выше двух этажей при использовании длинных стоек. Если поколхозить со стойками, то думаю три этажа вкорячить все-таки можно.

Площадка для установки экшн камер имеет регулировку угла наклона.
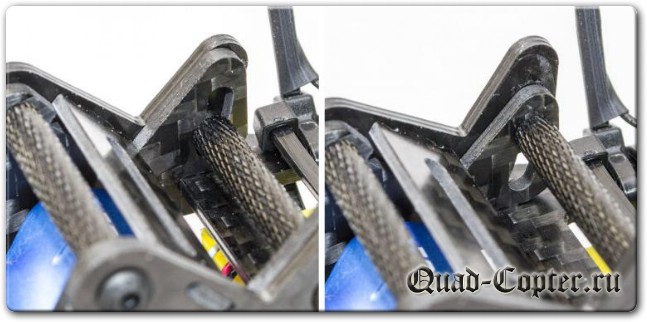
Камера закрепляется обычной велкро-стяжкой, держится вполне надежно и не отлетает даже при жесткой посадке в стиле – «морковка» с 5 метров.


Квадрик с таким конфигом летит вполне зачетно, даже несмотря на изначальный небольшой люфт в моторах (люфтили прямо из коробки).
Полеты самодельного квадрокоптера
Realacc Kylin 210 – неплохой вариант компактной рамы для самостоятельной сборки FPV коптера. Рама имеет хорошую жесткость при небольшом весе и вполне пригодна для хобийных полетов или тренировок.
В заключение приведу несколько вариантов рам с подобными креплениями для экшн камер.
 Realacc X210 214mm 3mm/4mm
Realacc X210 214mm 3mm/4mm
![]() Купить: BangGood, AliExpress
Купить: BangGood, AliExpress  Realacc X210 Pro 214mm
Realacc X210 Pro 214mm
![]() Купить: BangGood, AliExpress
Купить: BangGood, AliExpress  Realacc X210 V+ 214mm
Realacc X210 V+ 214mm
![]() Купить: BangGood, AliExpress
Купить: BangGood, AliExpress
Электроника и компоненты которые использовались в статье:
 Realacc X210 4mm Frame
Realacc X210 4mm Frame
![]() Купить: BangGood, AliExpress
Купить: BangGood, AliExpress  Realacc Kylin 210 210mm
Realacc Kylin 210 210mm
![]() Купить: BangGood, AliExpress
Купить: BangGood, AliExpress  FrSky XSR 2.4GHz 16CH
FrSky XSR 2.4GHz 16CH
![]() Купить: BangGood, AliExpress
Купить: BangGood, AliExpress  Foxeer HS1177 V2 600TVL
Foxeer HS1177 V2 600TVL
![]() Купить: BangGood, AliExpress
Купить: BangGood, AliExpress  HGLRC F4 V5PRO Flight
HGLRC F4 V5PRO Flight
![]() Купить: BangGood, AliExpress
Купить: BangGood, AliExpress  HGLRC F4 V6PRO Flight
HGLRC F4 V6PRO Flight
![]() Купить: BangGood, AliExpress
Купить: BangGood, AliExpress  4X Racerstar RS40A V2
4X Racerstar RS40A V2
![]() Купить: BangGood, AliExpress
Купить: BangGood, AliExpress  4X Racerstar Racing Edition
4X Racerstar Racing Edition
![]() Купить: BangGood, AliExpress
Купить: BangGood, AliExpress  Original MMCX 5.8GHG 3dBi
Original MMCX 5.8GHG 3dBi
![]() Купить: BangGood, AliExpress
Купить: BangGood, AliExpress
автор: actualvape
Похожие статьи:
Видеоподборки про RC моделизм → Квадрокоптер своими руками [Часть 3 — балансировка и полёты]
Видеоподборки про RC моделизм → Сборка гоночного Дрона на формованной раме и регуляторе 4в1
Видеоподборки про RC моделизм → Дистанционный выключатель RC switch для моделей своими руками
Квадрокоптер своими руками → Сборка миниквадрокоптера под FPV
Квадрокоптер своими руками → Из чего состоит квадрокоптер
Видеоподборки про RC моделизм → Квадрокоптер своими руками [часть 4 — подсветка, виброзащита и камера]
Видеоподборки про RC моделизм → Квадрокоптер своими руками [Часть 2 — настройка APM и первый полёт]
Видеоподборки про RC моделизм → Ставим систему FPV на квадрокоптер [часть 5]
Нет комментариев. Ваш будет первым!
Здравствуйте, уважаемые читатели! В этой статье хочу поделиться материалом по сборке FPV квадрокоптера на базе рамы, рассчитанной на установку пятидюймовых пропеллеров – Realacc Kylin 210. Главная особенность данной рамы – беспроблемное крепление бюджетных экшн камер типа Xiaomi YI и ей подобных. Неравнодушных к теме FPV полётов, прошу под кат.
Поставляется комплект рамы Realacc Kylin 210 в обычном полиэтиленовом пакете, все элементы рамы просто ссыпаны в одну кучу. Более подробные фото убрал под спойлер.
Диагональ по центрам моторов – 210 мм. Что ясно из названия рамы – Realacc Kylin 210.
Форма основания – вытянутый крест, в длину рама на 8 мм больше чем в ширину.
Толщина основания – 5,3 мм. Рама очень жёсткая на прогиб, это очень хорошо.

Ширина лучей – 13 мм, этого вполне достаточно для размещения отдельных регуляторов на каждый мотор.

Остальные карбоновые детали толщиной – 2 мм. Кроме верхней деки и проставки в креплении экшн камеры, они толщиной – 1.5 мм.
Распил ровный, без видимых косяков и задиров слоя.

На резе хорошо видна структура слоёв китайского псевдокарбона. Обычно это два или три слоя углеткани, остальное текстолит. Так, и цена соответствует качеству материала.

Рама собирается за несколько минут. Сначала собираем верхушку рамы с креплением для курсовой и экшн камеры.

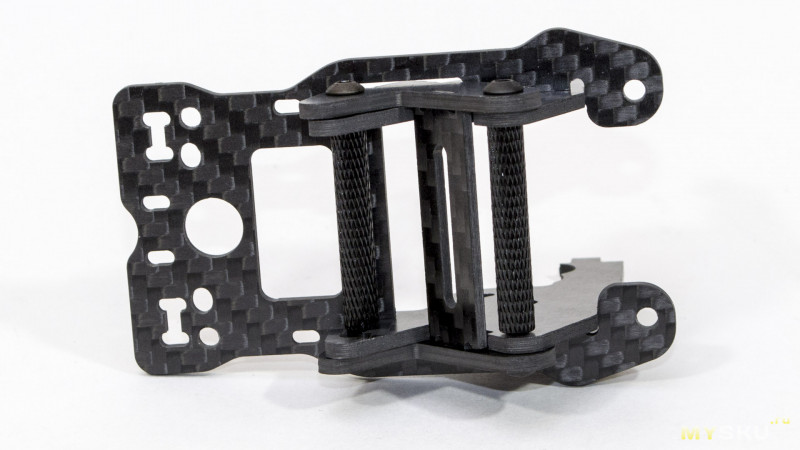
На основание рамы прикручиваем комплектные стойки.

Прикручиваем верхнюю часть рамы к стойкам. Рама готова.
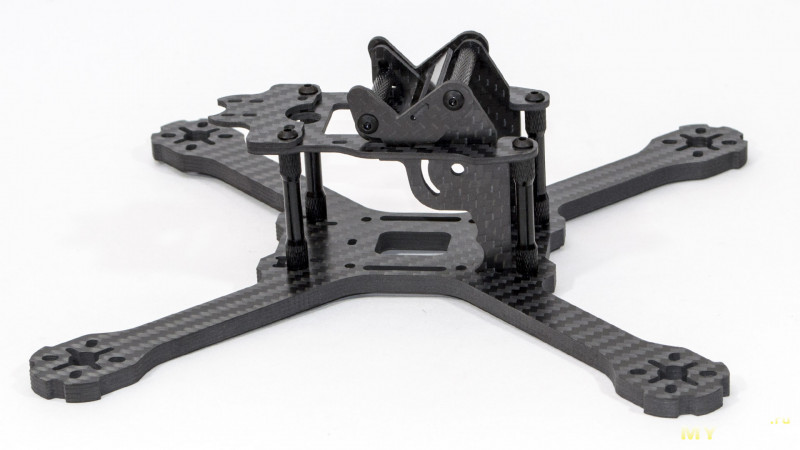
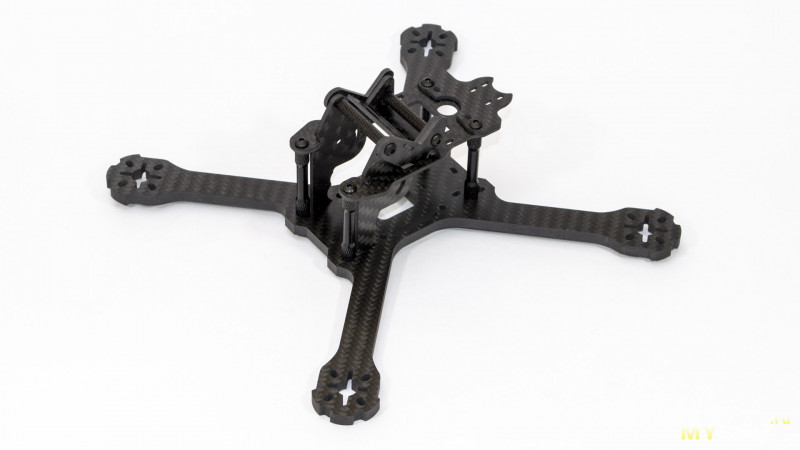
Вес пустой рамы – 94 г.

Для сборки квадрика, кроме вышеупомянутой рамы буду использовать: приёмник – FrSky XSR для аппаратуры TARANIS; курсовую камеру (можно использовать любую на ваш выбор) – Foxeer HS1177 V2.
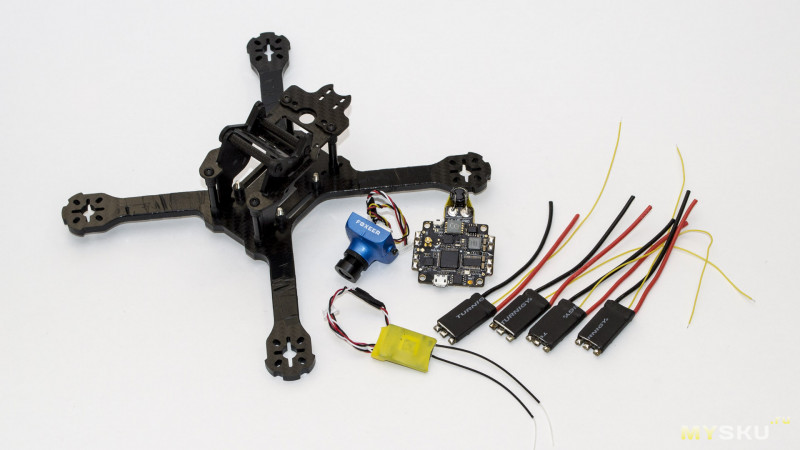
Полётник с интегрированной PDB и видеопередатчиком – HGLRC F4 V5PRO. На данный момент данный контроллер снят с производства и его прямой наследник – HGLRC F4 V6PRO. Крепление 30.5×30.5 мм.
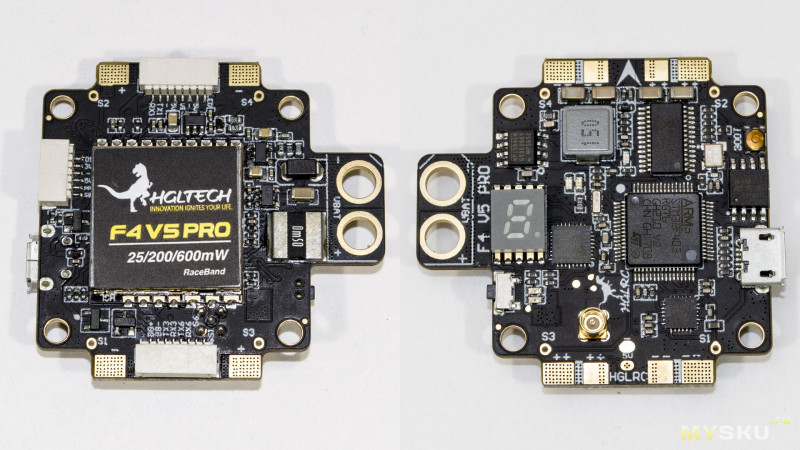
Четыре регулятора оборотов для бесколлекторных моторов с поддержкой протокола D-Shot 600 — Racerstar RS40A V2.

Комплект из четырёх бюджетных моторов – Racerstar Racing Edition BR2205 2600KV.

Приступим к сборке коптера. Полётный контроллер установлю на стойки с виброразвязкой – Flight Controller Anti-Vibration Fixed Screws.
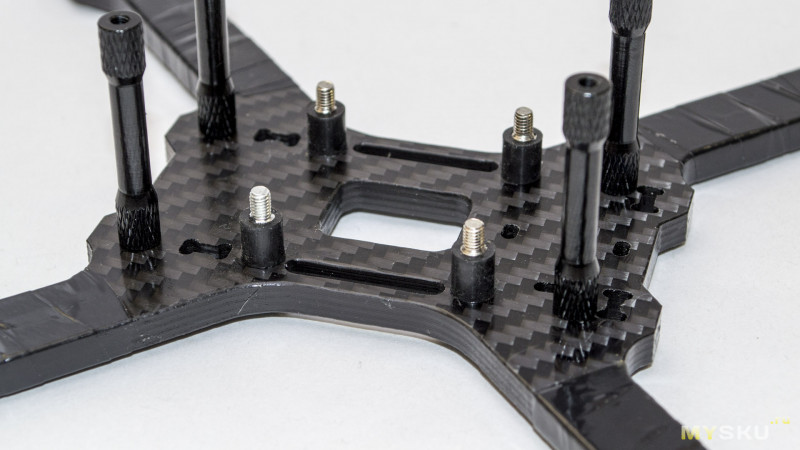
Пришлось подложить шайбы, чтобы притянуть стойки к раме.

Перед сборкой все острые кромки рамы я скруглил надфилем, а торцы покрыл несколькими слоями акрилового лака (можно клеем на основе цианакрилата).

Изолирую лучи одним слоем изоленты, на случай, если он лопнет, и куски карбона могут замкнуть контакты регулятора.

К основанию рамы прикручиваем все четыре мотора. Я креплю мотор на все четыре болта, хотя можно и на два, если с фиксатором резьбы.
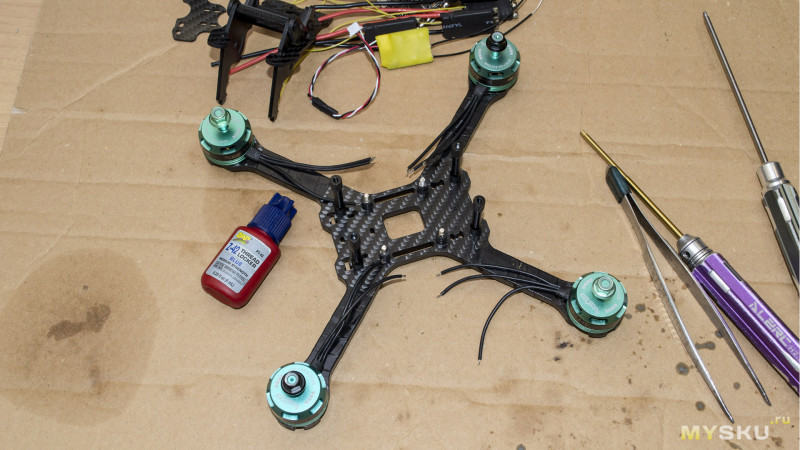


Чтобы в полёте ничего само не открутилось – использую фиксатор резьбы.

Прикручиваем полётный контроллер к стойкам.
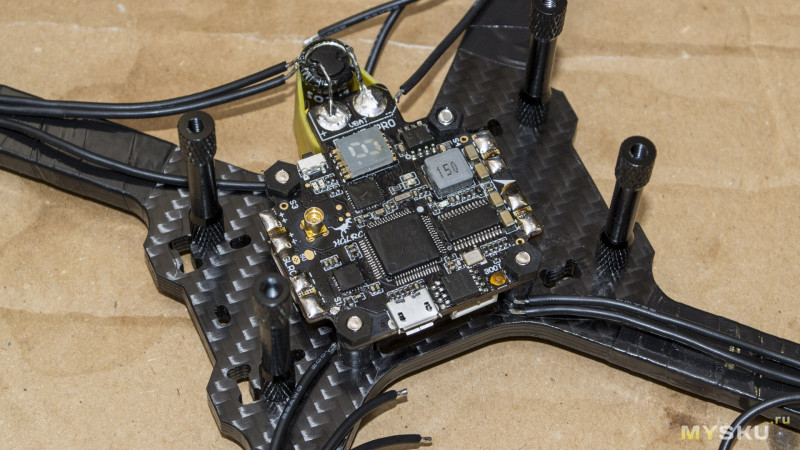
Закрепляем регуляторы на лучах парой оборотов изоленты, это необходимо для того, чтобы определить конечную длину проводов.
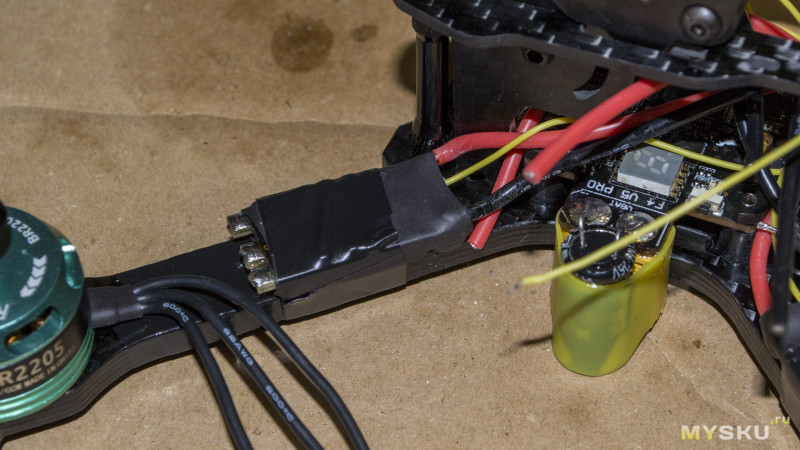
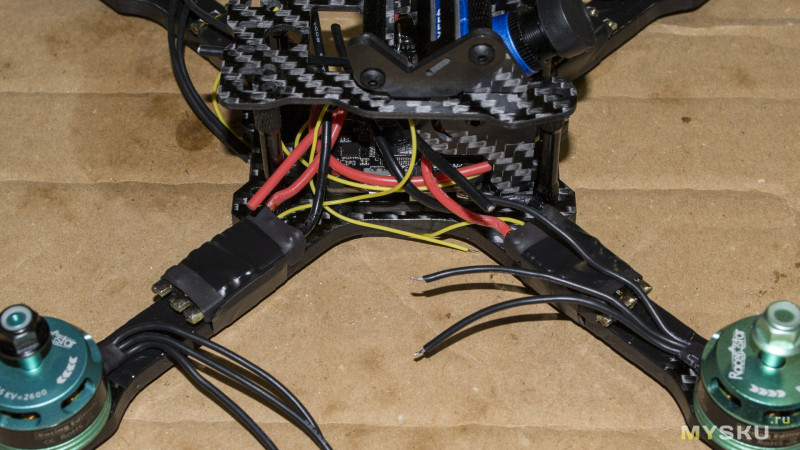
Согласно инструкции на полётный контроллер, паяем силовые и сигнальные провода от регуляторов на плату контроллера.
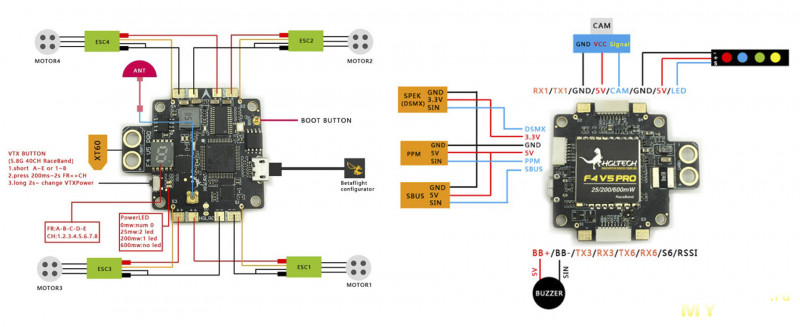
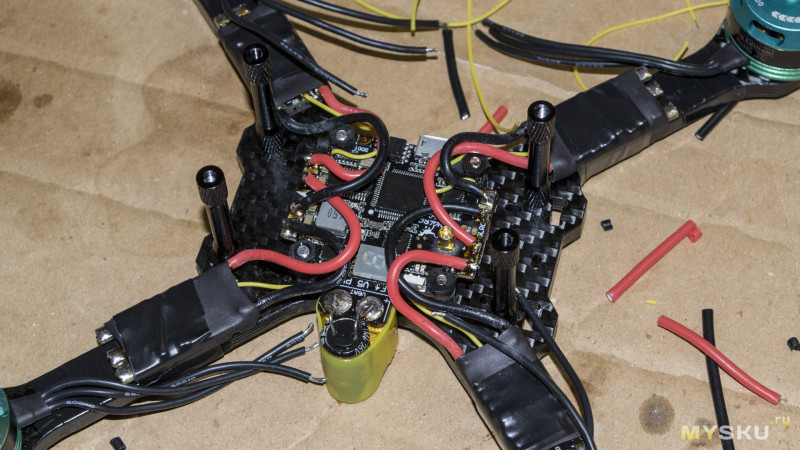
Паяем провода от моторов к регуляторам. К каким фазам, какой провод подключать значения особого не имеет и влияет только на направление вращения моторов. На этапе настройки можно поменять направление вращения моторов в программе blhelisuite.
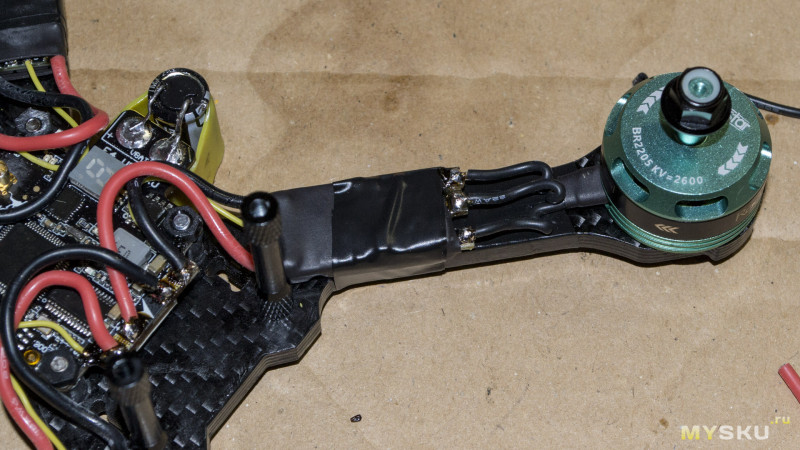
Проверяем качество пайки, чтобы в полёте ничего не отвалилось.

Рекомендую после пайки все соединения заизолировать специальным лаком, я использую несколько слоёв plastik 71 и подсушиваю феном.
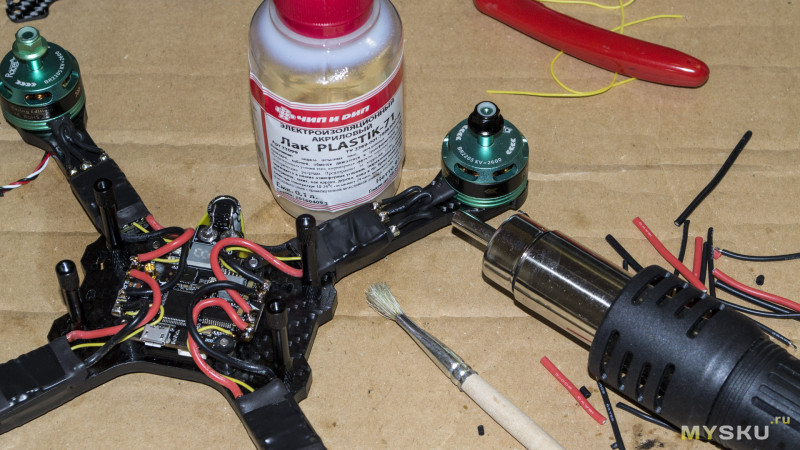
К полётнику подключаем все компоненты, включая антенну (без антенны сгорит видеопередатчик) и проверяем на работоспособность. Убедились, что все работает – можно окончательно заканчивать сборку и прикрутить верхнюю часть рамы к основанию. В процесс настройки полётного контроллера подробно вдаваться не буду, кому интересно можете подробно ознакомиться в этой статье – «Собираем и настраиваем квадрокоптер на базе комплекта – AuroraRC C2 Flytower OMVT F4», в разделе настройка.

На верхней деке есть отверстие для установки SMA разъема, к которому будет прикручиваться антенна. Для полётов вокруг да около такая антенна не нужна, и будет место для приёмника.


Установлю вот такой диполь (Original MMCX 5.8GHG 3dBi FPV Antenna) с разъёмом MMCX как раз подходит к полётнику.
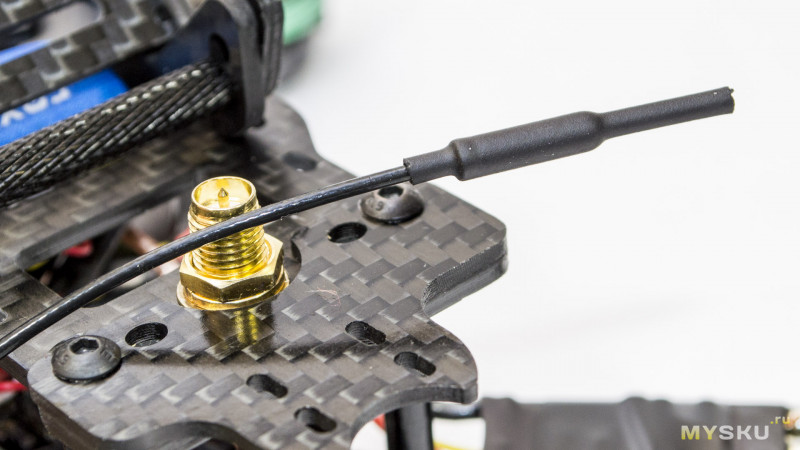
Окончание антенны дополнительно усилю вторым слоем термоусадки.

На освободившееся место стяжками закрепляем приёмник.
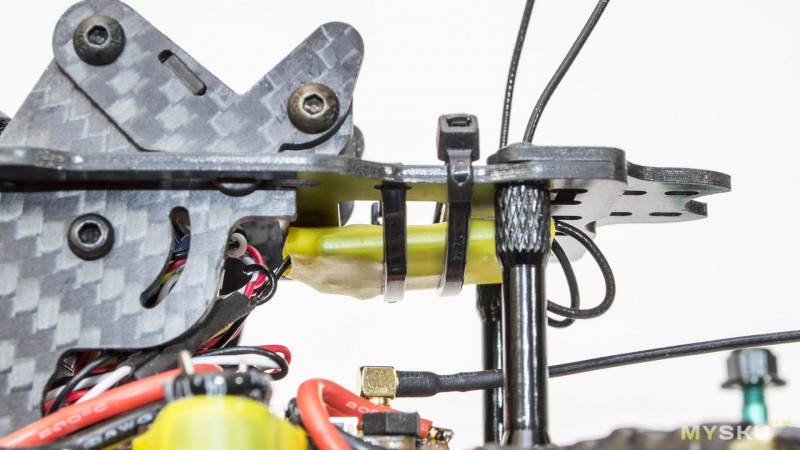
Усы антенн выводим за пределы рамы и закрепляем на обрезанных стяжках с помощью термоусадки. Угол в 90 градусов между лучами антенн не выдержан, но оно и так нормально работает на удалении до 200 метров.


Фиксируем антенну видеопередатчика.

Про пищалку тоже не забыл, притянул стяжкой к основанию рамы.
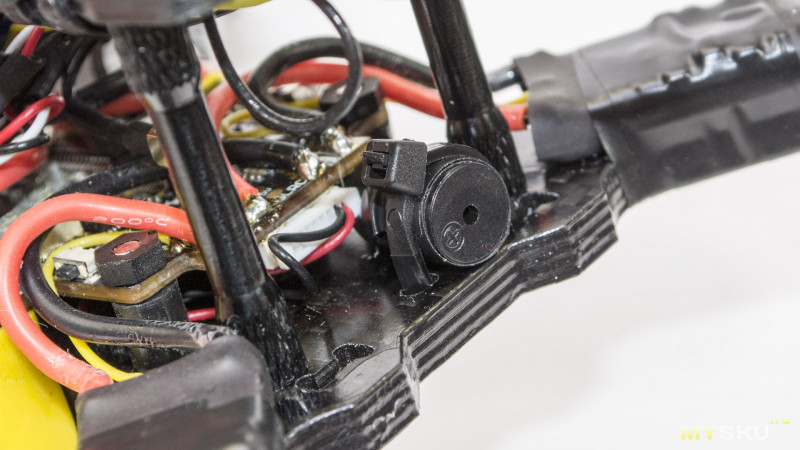
С помощью пинцета и какой-то матери, в пазы основания рамы продеваем стяжку-велкро для фиксации аккумуляторов. Для этой операции нужен пинцет с тонкими и изогнутыми губками, иначе намучаетесь.

Для более надёжной фиксации акума на раме, использую липучку типа репейник (крючки на раме). Но можно установить прилагаемую к комплекту рамы прокладку из пенорезины. Как по мне – липучка надёжней и не надо потом лазить на корячках по всему полю и искать куда отлетел акум при падении и ударе об землю.
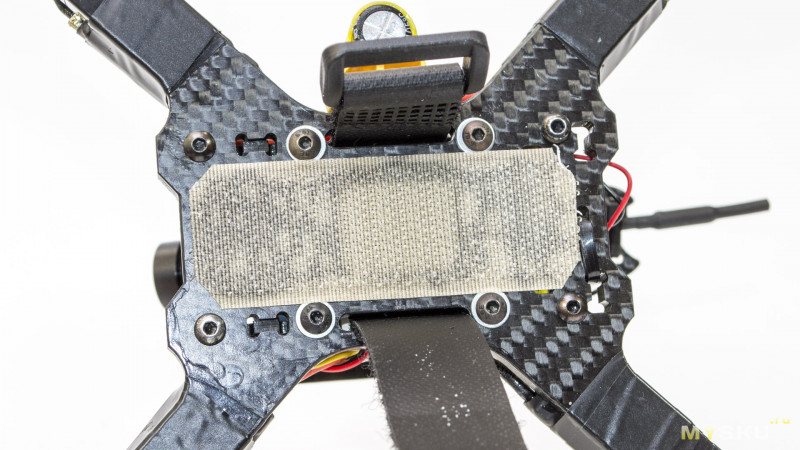


Последний штрих – окончательно фиксируем регуляторы на лучах рамы, кто-то это делает стяжками, я обычно просто приматываю изолентой.
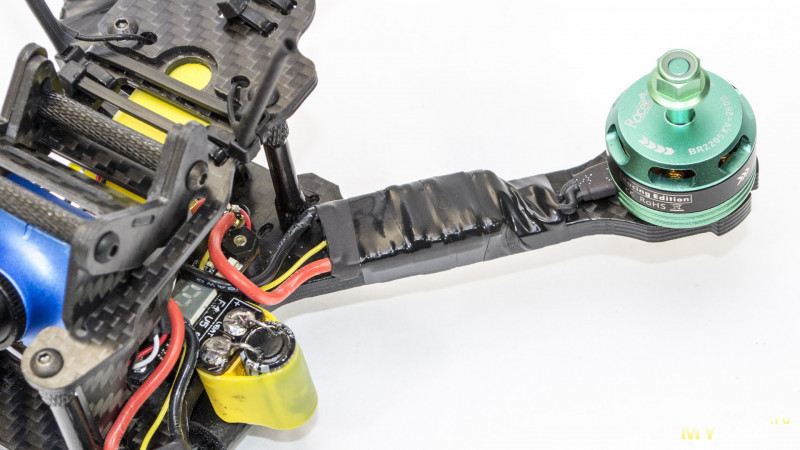
В итоге получилось:


Вес квадрика с пропами «трёшками» – 332 г

Вес с акумом 4S 1300 mAh – 486 г.

Немного хочу рассказать об особенностях рамы Realacc Kylin 210. Ширина проёма для установки FPV камеры 27.8 мм, и рассчитана на крепление камер через силиконовые демпферы, у меня таковых нет, подложил попавшиеся под руку шайбы.
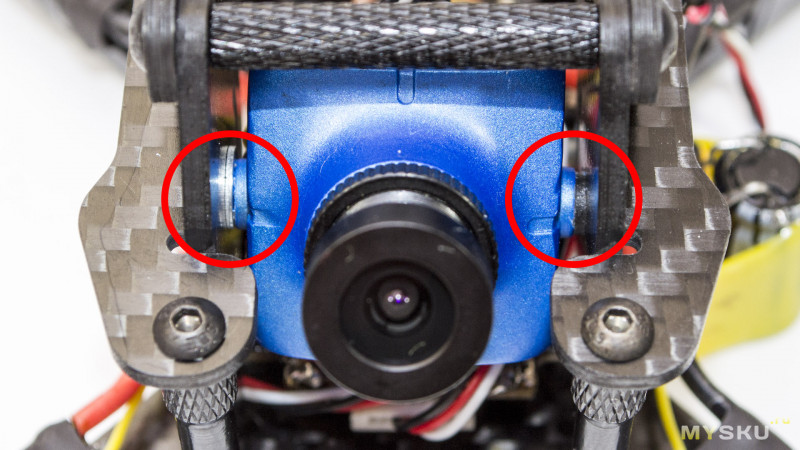
Боковые карбоновые пластины не дадут установить стек выше двух этажей при использовании длинных стоек. Если поколхозить со стойками, то думаю три этажа вкорячить всё-таки можно.
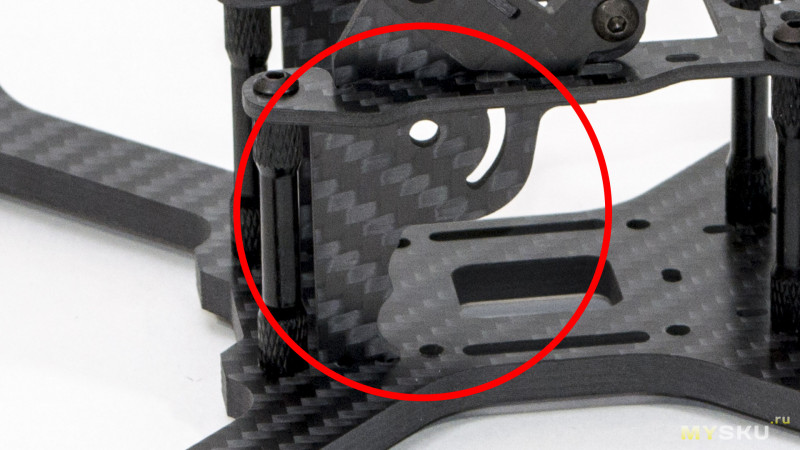
Площадка для установки экшн камер имеет регулировку угла наклона.
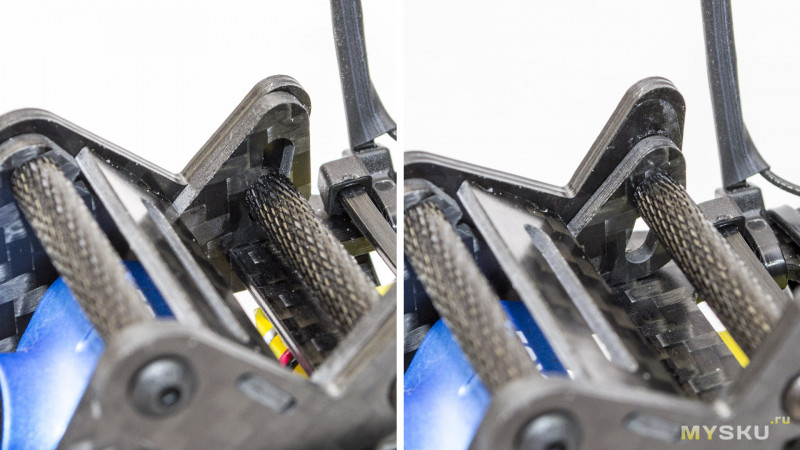
Камера закрепляется обычной велкро-стяжкой, держится вполне надёжно и не отлетает даже при жёсткой посадке в стиле – «морковка» с 5 метров.


Квадрик с таким конфигом летит вполне зачётно, даже несмотря на изначальный небольшой люфт в моторах (люфтили прямо из коробки).
Realacc Kylin 210 – неплохой вариант компактной рамы для самостоятельной сборки FPV коптера. Рама имеет хорошую жёсткость при небольшом весе и вполне пригодна для хобийных полётов или тренировок.
В заключение приведу несколько вариантов рам с подобными креплениями для экшн камер.
Realacc X210

Realacc X210 Pro

Realacc X210 V+
