
Общие сведения:
Драйвер шагового двигателя DM860H — предназначен для управления биполярным шаговым двигателем с номинальным напряжением от 24В до 110В и пиковым током до 7,2А. Драйвер оснащен защитой от перегрева, от повышенного напряжения и от перегрузки по току. Все входы управления имеют оптическую развязку. На радиаторе драйвера установлен вентилятор принудительного охлаждения.
В драйвере реализована высокая плавность движения вала шагового двигателя, высокий отдаваемый момент, алгоритмы подавления резонанса шагового двигателя и определения остановки вала двигателя («срыва»), функция автоматического снижения тока удержания и снижение уровня шума при работе двигателя.
Характеристики:
- Напряжение шагового двигателя: 24-110В постоянного тока;
- Драйвер позволяет запитать ШД от напряжения 18-80В переменного тока.
- Рабочий ток шагового двигателя: до 6,0А;
- Пиковый ток шагового двигателя: до 7,2А;
- Микрошаг: 2 / 4 / 8 / 16 / 32 / 64 / 128 / 5 / 10 / 20 / 25 / 40 / 50 / 100 / 125;
- Напряжение на управляющих входах: 5-24В.
(напряжение выше 5В подаётся через ограничительный резистор, см. схему); - Сигналы управления: PUL/DIR (STEP/DIR);
- Частота импульсов PUL (STEP): до 200кГц;
- Рабочая температура: от 0 до +50 °C.
Подключение:
Назначение силовых выводов колодки «High Viltage»:
- «AC+» и «AC-» — Вход напряжения питания шагового двигателя;
- «A+» и «A-» — Подключение первой обмотки шагового двигателя;
- «B+» и «B-» — Подключение второй обмотки шагового двигателя.
Подключение обмоток двигателя к драйверу зависит от количества выводов у двигателя.

Биполярные двигатели с 4 выводами подключаются по схеме А. Двигатели с 6 выводами подключаются по схеме Б или В. Двигатели с 8 выводами подключаются по схеме Г или Д.
Запрещается подключать или отключать обмотки двигателя на включенном драйвере!
Назначение выводов управления колодки «Signal»:
- «PUL+» и «PUL-» — Вход импульсов PULSE (сигнал STEP).
- «DIR+» и «DIR-» — Вход направления вращения (сигнал DIRECTION);
- «ENA+» и «ENA-» — Вход разрешения работы (инверсный сигнал ENABLE).
Для подключения управляющих выводов можно использовать одну их следующих схем:
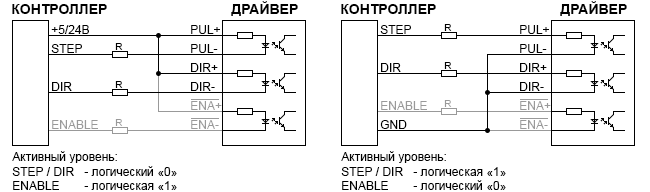
Допускается подключать драйвер к контроллеру без использования сигнала ENABLE, тогда выводы ENA+ и ENA- остаются свободными (не подключёнными).
- При уровне логической «1» = 5В, все сопротивления R исключаются из схемы.
- При уровне логической «1» = 12В, все сопротивления R равны 1кОм.
- При уровне логической «1» = 24В, все сопротивления R равны 2кОм.
Подключение драйвера к Arduino и назначение управляющих сигналов, описано в статье Wiki — Сигналы управления драйвера ШД.
Настройка:
Выбор тока фазы:
Ток фазы настраивается DIP-переключателями SW1, SW2 и SW3 согласно таблице на корпусе.
В таблице указан рабочий ток, пиковый ток и положение переключателей.
Выбор тока удержания:
Ток удержания настраивается переключателем SW4.
- ON — ток в момент удержания не снижается «Full Cerrent» — полный ток фазы;
- OFF — ток в момент удержания снижается «Half Current» — половинный ток фазы.
Удержанием считается остановка двигателя с удержанием вала.
Выбор микрошага:
Микрошаг настраивается DIP-переключателями SW5, SW6, SW7 и SW8 согласно таблице на корпусе.
В таблице указано количество тактов на полный оборот вала и положение переключателей
(дополнительно может быть указано количество микрошагов на полный шаг).
Индикация ошибок:
Зелёный светодиод:
- Не светится — отсутствует питание на выводах «AC+» и «AC-» колодки «High Viltage».
Красный светодиод:
- Мигает 1 раз через паузу — ток в обмотках двигателя превысил допустимый предел;
- Мигает 2 раза через паузу — напряжение питания превысило допустимый предел;
Комплектация:
- 1х Драйвер шагового двигателя;
Ссылки:
- Wiki — Сигналы управления драйвера ШД: PUL/DIR, STEP/DIR, CW/CCW;
- Wiki — Шаговые двигатели.
Драйвер шагового двигателя DM860H, 7.2А, AC18-80V, DC24-110V.
Особенности драйвера:
Технология самотестирования и автоматической настройки параметров обеспечивает оптимальную реакцию при работе с разными двигателями
16 ступеней деления шага, от 1:2 до 1:256, устанавливаемых с помощью DIP переключателей
Возможность выбора тока удержания (половинный или полный) вала двигателя
Оптоизолированные входа, высокая помехоустойчивость
Защита от перенапряжения, низкого питающего напряжения и перегрузки по току
Характеристики:
Напряжение шагового двигателя: 24-110В постоянного тока;
Драйвер позволяет запитать ШД от напряжения 18-80В переменного тока.
Рабочий ток шагового двигателя: до 6,0А;
Пиковый ток шагового двигателя: до 7,2А;
Микрошаг: 2 / 4 / 8 / 16 / 32 / 64 / 128 / 5 / 10 / 20 / 25 / 40 / 50 / 100 / 125;
Напряжение на управляющих входах: 5-24В.
(напряжение выше 5В подаётся через ограничительный резистор);
Сигналы управления: PUL/DIR (STEP/DIR);
Частота импульсов PUL (STEP): до 200кГц;
Рабочая температура: от 0 до +50 °C.
Подключение:
Назначение силовых выводов колодки «High Viltage»:
«AC+» и «AC-» — Вход напряжения питания шагового двигателя;
«A+» и «A-» — Подключение первой обмотки шагового двигателя;
«B+» и «B-» — Подключение второй обмотки шагового двигателя.
Подключение обмоток двигателя к драйверу зависит от количества выводов у двигателя.
Биполярные двигатели с 4 выводами подключаются по схеме А. Двигатели с 6 выводами подключаются по схеме Б или В. Двигатели с 8 выводами подключаются по схеме Г или Д.
Запрещается подключать или отключать обмотки двигателя на включенном драйвере!
Назначение выводов управления колодки «Signal»:
«PUL+» и «PUL-» — Вход импульсов PULSE (сигнал STEP).
«DIR+» и «DIR-» — Вход направления вращения (сигнал DIRECTION);
«ENA+» и «ENA-» — Вход разрешения работы (инверсный сигнал ENABLE).
Для подключения управляющих выводов можно использовать одну их следующих схем:
Допускается подключать драйвер к контроллеру без использования сигнала ENABLE, тогда выводы ENA+ и ENA- остаются свободными (не подключёнными).
При уровне логической «1» = 5В, все сопротивления R исключаются из схемы.
При уровне логической «1» = 12В, все сопротивления R равны 1кОм.
При уровне логической «1» = 24В, все сопротивления R равны 2кОм.
Подключение драйвера к Arduino и назначение управляющих сигналов, описано в статье Wiki — Сигналы управления драйвера ШД.
Настройка:
Выбор тока фазы:
Ток фазы настраивается DIP-переключателями SW1, SW2 и SW3 согласно таблице на корпусе.
В таблице указан рабочий ток, пиковый ток и положение переключателей.
Выбор тока удержания:
Ток удержания настраивается переключателем SW4.
ON — ток в момент удержания не снижается «Full Cerrent» — полный ток фазы;
OFF — ток в момент удержания снижается «Half Current» — половинный ток фазы.
Удержанием считается остановка двигателя с удержанием вала.
Выбор микрошага:
Микрошаг настраивается DIP-переключателями SW5, SW6, SW7 и SW8 согласно таблице на корпусе.
В таблице указано количество тактов на полный оборот вала и положение переключателей
(дополнительно может быть указано количество микрошагов на полный шаг).
Индикация ошибок:
Зелёный светодиод:
Не светится — отсутствует питание на выводах «AC+» и «AC-» колодки «High Viltage».
Красный светодиод:
Мигает 1 раз через паузу — ток в обмотках двигателя превысил допустимый предел;
Мигает 2 раза через паузу — напряжение питания превысило допустимый предел;
DM860H – имеющий защиту от КЗ и перегрева цифровой драйвер для управления в схемах автоматизации оборудования ШД бренда Nema 2-х фазного типа, запитанного от источника постоянного тока. Чаще всего задействуются 4-проводные шаговые двигатели типоразмеров 85 и 110. Данным типовым размерам соответствуют ШД Nema 34 и 43. В ряде случаев можно рассмотреть вариант подключения к клеммам ШД типоразмера 130 мм (Nema 51). При принятии решения следует учитывать ограничения по величине тока и напряжения.
Значение напряжения питания электронной платы может находиться в диапазоне 18-80 В. Рабочий ток не должен превышать максимального значения а 7,2 А, минимальное значение рабочего токового диапазона равно 2,4 А. Управляющий сигнал контроллера может передаваться на частоте, которая выбирается в диапазоне до 200 килогерц.
Схема электронного устройства имеет встроенную защиту в виде оптической изоляции сигнала, компенсации амплитудных резонансных воздействий. В устройстве с инновационными свойствами наличествует функционал «спящего» режима.
Стиплайн (Steepline) реализует драйвер DM860H в ответ на выросший в последнее время спрос по данной модели. Электронная плата выпускается Leadshine — это производитель мирового уровня, известный качеством своей продукции. Покупатели позитивно оценили ее конструктивные и эксплуатационные характеристики. DM860H можно эксплуатировать только при температуре выше нуля и относительной влажности до 90 градусов.
Максимальная плюсовая температура окружающей среды, в которой еще сохраняется работоспособность драйвера, равна 50 градусам. Ток входа к элементам логики на плате драйвера DM860H может принимать значения 7, 10, 16 мА. Режим дробления шага в DM860H — 1/200. Изоляционное сопротивление драйвера соответствует уровню в 500 Mom.
Электронную плату можно подключать к ПК. При наличии специальной программы из нее можно подавать команды на изменение параметров работы ШД.
В магазине Стиплайн (Steepline) стоимость модели DM860H отличается максимально приемлемыми параметрами. При значительном опте магазин предлагает весьма привлекательные скидки.
DM860H драйвер шагового двигателя постоянного тока 18 — 80 В для 86/110 2-фазного 4-проводного шагового двигателя.
Оплата
Вы можете выбрать любой удобный для Вас способ оплаты: банковский перевод, оплата банковской картой или наличные деньги в офисе компании.
Доставка по России
Доставка товара осуществляется ТК: СДЭК, Деловые линии, ПЭК, КиТ, ЖелДорЭкспедиция. ) — см. доставка
Доставка и отгрузка товара осуществляется транспортными компаниями, после оплаты заказа. Стоимость доставки будет рассчитана менеджером после оплаты заказа. Доставка оплачивается полностью заказчиком при получении груза.
Самовывоз
Вы можете самостоятельно забрать Ваш заказ на складе по адресу Россия, Ростовская область, г. Каменск-Шахтинский, пер. Полевой 43 (координаты для навигатора 48.292474, 40.275522). Для крупногабаритных заказов воспользуйтесь транспортным средством.
Руководство пользователя
Для
DM860

Введение, особенности и приложения
Введение
DM860 — это полностью цифровой шаговый привод, разработанный с использованием усовершенствованного алгоритма управления DSP, основанного на новейшей технологии управления движением. Он достиг уникального уровня плавности системы, обеспечивая оптимальный крутящий момент и исключает среднюю нестабильность.
По сравнению с традиционными аналоговыми приводами DM860 может управлять шаговым двигателем с гораздо меньшим уровнем шума,
меньший нагрев и более плавное движение. Его уникальные особенности делают DM860 идеальным выбором для приложений с высокими требованиями.
Особенности
- Anti-Resonance обеспечивает оптимальный крутящий момент и обнуляет среднюю нестабильность
- Многоступенчатый режим позволяет пошаговому входу с низким разрешением производить более высокий микрошаговый выход, тем самым обеспечивая более плавное движение двигателя.
- 16 выбираемых микрошаговых разрешений, включая 400, 800, 1600, 3200, 6400, 12800, 25600, 51200, 1000, 2000, 4000,
- 5000, 8000, 10000, 20000, 40000
- Входная громкостьtage 24-80 В постоянного тока
- 8 выбираемых пиковых значений тока, включая 2.40 А, 3.08 А, 3.77 А, 4.45 А, 5.14 А, 5.83 А, 6.52 А, 7.20 А
- Частота импульсного входа до 200 кГц, TTL-совместимый и оптически изолированный вход
- Автоматическое снижение холостого тока
- Подходит для 2-х и 4-х фазных двигателей
- Over-voltagе, защита от перегрузки по току
Приложения
Подходит для широкого диапазона шаговых двигателей, от NEMA размера 17 до 42. Он может использоваться в различных типах машин, таких как XY столы, гравировальные машины, этикетировочные машины, лазерные резаки, устройства для захвата и т. Д. Особенно подходит для желаемых приложений с низким уровнем шума, низким нагревом, высокой скоростью и высокой точностью.
Характеристики
Электрические характеристики (Tj = 25/77)
| параметры |
DM860 |
|||
|
Мин. |
типичный | Max |
Ед. изм |
|
|
Выходной ток |
1.0 | – | 7.2 (пиковая) | A |
|
Vol входtage |
+24 | +68 | +80 | В постоянного тока |
|
Ток логического сигнала |
7 | 10 | 16 | mA |
| Частота импульсного входа | 0 | – | 200 |
кГц |
| Ширина импульса | 2.5 | – | – |
uS |
Операционная среда и другие характеристики
|
Охлаждение |
Естественное охлаждение или принудительное охлаждение | |
|
Окружающая среда |
Избегайте попадания пыли, масляного тумана и агрессивных газов. |
|
|
Температура окружающей среды |
0 ℃ — 50 ℃ |
|
|
Условия эксплуатации |
Влажность | 40% — 90% |
|
Рабочая Температура |
70 ℃ Макс. |
|
| вибрация |
5.9 м / с2 Макс. |
|
|
Температура хранения |
-20 ℃ — 65 ℃ |
|
| Вес |
Прибл. 620 г (21.7 унции) |
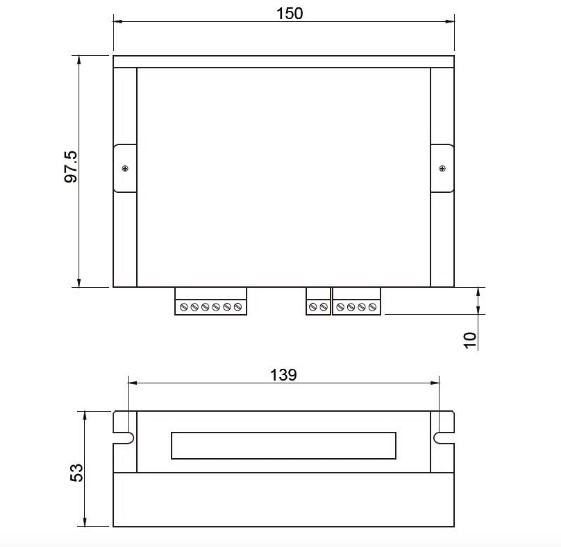
Механические характеристики (единица измерения: мм [дюйм])

Рисунок 1: Механические характеристики
* Рекомендуется использовать боковой монтаж для лучшего отвода тепла
Устранение тепла
- Надежная рабочая температура водителя должна быть <70 ℃ (158 ℉), а рабочая температура двигателя должна быть <80 ℃ (176 ℉);
- Рекомендуется использовать автоматический режим холостого хода, а именно: ток автоматически снижается до 50% при остановке двигателя, чтобы уменьшить нагрев драйвера и нагрев двигателя;
- Рекомендуется устанавливать драйвер вертикально, чтобы увеличить площадь радиатора. При необходимости используйте метод принудительного охлаждения для охлаждения системы.
Назначение контактов и описание
DM860 имеет два разъема: разъем P1 для подключения сигналов управления и разъем P2 для подключения питания и двигателя. В следующих таблицах приведены краткие описания двух разъемов. Более подробное описание контактов и связанных проблем представлено в разделах 4, 5, 9.
Разъем P1 Конфигурации
| Функция Pin |
Detчеснокs |
| PUL+ | Импульсный сигнал: в режиме одиночного импульса (импульс / направление) этот вход представляет импульсный сигнал, каждый активный нарастающий или спадающий фронт; 4.5-5 В |
| PUL– | |
| DИК + | Сигнал DIR: в одноимпульсном режиме этот сигнал имеет низкий / высокий уровень громкости.tagе уровней, обозначающих два направления вращения двигателя; |
| DIR– | |
| ENA+ | Сигнал включения: этот сигнал используется для включения / выключения драйвера. Высокий уровень (управляющий сигнал NPN, PNP и дифференциальные управляющие сигналы наоборот, а именно низкий уровень для включения.) Для включения драйвера и низкий уровень для отключения драйвера. Обычно оставил НЕ ПОДКЛЮЧЕНО (ВКЛЮЧЕНО). |
| ENA– |
Разъем P2 Конфигурации
|
Функция Pin |
Подробнее |
|
В постоянного тока |
Источник питания, 24 ~ 80 В постоянного тока, включая напряжениеtage колебания и объем ЭДСtage. |
|
GND |
Мощность заземления. |
|
А +, А- |
Фаза двигателя А |
|
В +, В- |
Фаза двигателя B |
4. Интерфейс разъема управляющего сигнала (P1)
DM860 может принимать дифференциальные и несимметричные входы (включая выход с открытым коллектором и PNP). DM860 имеет 3 оптически изолированных логических входа, которые расположены на разъеме P1 для приема сигналов управления драйвером линии. Эти входы изолированы, чтобы минимизировать или устранить электрические шумы, связанные с сигналами управления приводом. Рекомендуется использовать управляющие сигналы линейного драйвера для повышения помехоустойчивости драйвера в условиях помех. На следующих рисунках показаны подключения к сигналам с открытым коллектором и PNP.
 5. Подключение двигателя
5. Подключение двигателя
 5. Подключение двигателя
5. Подключение двигателяDM860 может управлять любыми 2-х и 4-х фазными гибридными шаговыми двигателями.
Подключение к 4-выводным двигателям
4-выводные двигатели наименее гибкие, но их проще всего подключить. Скорость и крутящий момент будут зависеть от индуктивности обмотки. При настройке выходного тока драйвера умножьте указанный фазный ток на 1.4, чтобы определить пиковый выходной ток.


Рисунок 5: Подключение 4-выводного двигателя
Подключение к 6-выводным двигателям
Подобно 8-выводным шаговым двигателям, 6-выводные двигатели имеют две конфигурации, доступные для работы с высокой скоростью или высоким крутящим моментом. Конфигурация с более высокой скоростью, или полукатушка, описана так, потому что в ней используется половина обмоток индуктора двигателя. Конфигурация с более высоким крутящим моментом или полная катушка использует полные обмотки фаз.
Конфигурации половинной катушки
Как указывалось ранее, конфигурация полукатушки использует 50% фазных обмоток двигателя. Это дает более низкую индуктивность и, следовательно, меньший выходной крутящий момент. Как и при параллельном подключении 8-выводного двигателя, выходной крутящий момент будет более стабильным на более высоких скоростях. Эта конфигурация также называется половинным прерывателем. При настройке выходного тока драйвера умножьте указанный на фазу (или униполярный) номинальный ток на 1.4, чтобы определить пиковый выходной ток.

Рисунок 6: Подключение полукатушки 6-выводного двигателя (более высокая скорость)
Полная конфигурация катушки
Конфигурация с полной обмоткой шестиступенчатого двигателя должна использоваться в приложениях, где желателен более высокий крутящий момент при более низких скоростях. Эта конфигурация также называется полной медью. В режиме полной обмотки двигатели должны работать только при 70% номинального тока, чтобы предотвратить перегрев.

Рисунок 7: Соединения с полной обмоткой 6-выводного двигателя (более высокий крутящий момент)
Подключение к 8-выводным двигателям
8-выводные двигатели предлагают разработчикам систем высокую степень гибкости, поскольку они могут быть подключены последовательно или параллельно, что позволяет удовлетворить широкий спектр применений.
Последовательные соединения
Конфигурация последовательного двигателя обычно используется в приложениях, где требуется более высокий крутящий момент при более низких скоростях. Поскольку эта конфигурация имеет наибольшую индуктивность, производительность начнет ухудшаться на более высоких скоростях. В последовательном режиме двигатели также должны работать только на 70% от их номинального тока, чтобы предотвратить перегрев.

Рисунок 8: Последовательное подключение 8-выводного двигателя
Параллельные соединения
8-выводный двигатель в параллельной конфигурации обеспечивает более стабильный, но более низкий крутящий момент на более низких скоростях. Но из-за более низкой индуктивности на более высоких скоростях будет более высокий крутящий момент. Умножьте номинальный ток каждой фазы (или униполярного) на 1.96 или номинальный биполярный ток на 1.4, чтобы определить пиковый выходной ток.

Рисунок 9: Параллельное подключение 8-выводного двигателя
Выбор источника питания
DM860 совместим с шаговыми двигателями среднего и малого размера (от типоразмера NEMA от 17 до 34), производимых многими производителями двигателей по всему миру. Для достижения хороших ходовых качеств важно выбрать объем питания.tage и выходной ток должным образом. Вообще говоря, объем поставкиtage определяет высокоскоростные характеристики двигателя, а выходной ток определяет выходной крутящий момент ведомого двигателя (особенно на более низкой скорости). Более высокий объем предложенияtage позволит достичь более высокой скорости двигателя за счет большего шума и нагрева. Если требования к скорости движения низкие, лучше использовать меньшую мощность питания.tage для уменьшения шума, нагрева и повышения надежности.
Регулируемый или нерегулируемый источник питания
Для питания драйвера могут использоваться как регулируемые, так и нерегулируемые источники питания. Однако нерегулируемые источники питания предпочтительны из-за их способности выдерживать скачки тока. Если регулируемые источники питания (например, большинство импульсных источников) действительно используются, важно иметь большой выходной ток, чтобы избежать таких проблем, как ток cl.amp, напримерample, используя источник питания 4A для работы двигателя с драйвером 3A. С другой стороны, если используется нерегулируемый источник питания, можно использовать источник питания с более низким номинальным током, чем у двигателя (обычно 50% — 70% тока двигателя). Причина в том, что драйвер потребляет ток от конденсатора источника питания нерегулируемого источника питания только во время включения цикла ШИМ, но не во время отключения. Следовательно, средний ток, потребляемый от источника питания, значительно меньше тока двигателя. Для бывшегоampТо есть, два двигателя на 3А могут питаться от одного источника питания на 4А.
Несколько драйверов
Рекомендуется использовать несколько драйверов для совместного использования одного блока питания, чтобы снизить стоимость, если блок питания имеет достаточную мощность.
Во избежание перекрестных помех НЕ подключайте последовательно входные контакты источника питания драйверов. (Вместо этого подключите их к источнику питания отдельно.)
Выбор Supply Vol.tage
Силовые МОП-транзисторы внутри DM860 могут фактически работать в диапазоне +24 ~ + 110 В постоянного тока, включая колебания входной мощности и напряжение обратной ЭДС.tage генерируется обмотками двигателя при торможении вала двигателя. Более высокий объем предложенияtage может увеличивать крутящий момент двигателя на более высоких скоростях, что помогает избежать потери шагов. Однако чем выше объемtage может вызвать более сильную вибрацию двигателя на более низкой скорости, а также может вызвать перенапряжениеtage защита или даже повреждение водителя. Поэтому рекомендуется выбирать только достаточно высокий объем питания.tage для предполагаемых приложений, и рекомендуется использовать блоки питания с теоретической выходной мощностьюtage +20 ~ + 68 В постоянного тока, оставляя место для колебаний мощности и противо-ЭДС.
Выбор разрешения микрошага и выходного тока драйвера
Этот драйвер использует 8-битный DIP-переключатель для установки разрешения микрошага и рабочего тока двигателя, как показано ниже:

Выбор разрешения микрошага
Разрешение микрошага устанавливается переключателями SW5, 6, 7, 8 DIP-переключателя, как показано в следующей таблице:
|
Микрошаг |
Шаги / оборот (для двигателя 1.8 °) |
SW5 |
SW6 |
SW7 |
SW8 |
|
2 |
400 |
ON |
ON |
ON |
ON |
|
4 |
800 |
OFF |
ON |
ON |
ON |
|
8 |
1600 |
ON |
OFF |
ON |
ON |
|
16 |
3200 |
OFF |
OFF |
ON |
ON |
|
32 |
6400 |
ON |
ON |
OFF |
ON |
|
64 |
12800 |
OFF |
ON |
OFF |
ON |
|
128 |
25600 |
ON |
OFF |
OFF |
ON |
|
256 |
51200 |
OFF |
OFF |
OFF |
ON |
|
5 |
1000 |
ON |
ON |
ON |
OFF |
|
10 |
2000 |
OFF |
ON |
ON |
OFF |
|
20 |
4000 |
ON |
OFF |
ON |
OFF |
|
25 |
5000 |
OFF |
OFF |
ON |
OFF |
|
40 |
8000 |
ON |
ON |
OFF |
OFF |
|
50 |
10000 |
OFF |
ON |
OFF |
OFF |
|
100 |
20000 |
ON |
OFF |
OFF |
OFF |
|
200 |
40000 |
OFF |
OFF |
OFF |
OFF |
текущие настройки
Для данного двигателя более высокий ток драйвера заставит двигатель выдавать больший крутящий момент, но в то же время вызывает больший нагрев двигателя и драйвера. Следовательно, выходной ток обычно устанавливается таким, чтобы двигатель не перегревался в течение длительного времени.
Поскольку параллельное и последовательное соединение катушек двигателя значительно изменяет результирующую индуктивность и сопротивление, поэтому важно установить выходной ток драйвера в зависимости от фазного тока двигателя, проводов двигателя и методов подключения. Номинальный фазный ток, предоставляемый производителем двигателя, важен при выборе тока драйвера, однако выбор также зависит от проводов и соединений.
Первые три бита (SW1, 2, 3) DIP-переключателя используются для установки динамического тока. Выберите настройку, наиболее близкую к требуемому току вашего двигателя.
Настройка динамического тока
|
REF Текущий |
Пиковый ток |
SW1 |
SW2 |
SW3 |
|
2.00A |
2.40A |
ON |
ON |
ON |
|
2.57A |
3.08A |
OFF |
ON |
ON |
|
3.14A |
3.77A |
ON |
OFF |
ON |
|
3.71A |
4.45A |
OFF |
OFF |
ON |
|
4.28A |
5.14A |
ON |
ON |
OFF |
|
4.86A |
5.83A |
OFF |
ON |
OFF |
|
5.43A |
6.52A |
ON |
OFF |
OFF |
|
6.00A |
7.20A |
OFF |
OFF |
OFF |
Заметки: Из-за индуктивности двигателя фактический ток в катушке может быть меньше установленного динамического тока, особенно в условиях высокой скорости.
Уставка тока покоя
Для этого используется SW4. OFF означает, что ток покоя установлен равным половине выбранного динамического тока, и ON означает, что ток покоя установлен таким же, как выбранный динамический ток.
Ток автоматически снижается до 50% от выбранного динамического тока через одну секунду после последнего импульса. Теоретически это снизит нагрев двигателя до 36% (из-за P = I2 * R) от первоначального значения. Если приложению требуется другой ток покоя.
Примечания по подключению
- Чтобы улучшить характеристики драйвера по защите от помех, рекомендуется использовать экранированный кабель с витой парой.
- Во избежание шума, возникающего в сигнале PUL / DIR, провода импульсного / направленного сигнала и провода двигателя не должны быть связаны вместе. Лучше разделять их не менее чем на 10 см, иначе мешающие сигналы, генерируемые двигателем, легко повредят импульсные сигналы направления, вызывая ошибку положения двигателя, нестабильность системы и другие сбои.
- Если источник питания обслуживает несколько драйверов, рекомендуется подключение драйверов по отдельности вместо последовательного подключения.
- Запрещается тянуть и вставлять разъем P2, когда драйвер включен, потому что через катушки двигателя течет большой ток (даже когда двигатель остановлен). Вытягивание или вставка разъема P2 при включенном питании вызовет чрезвычайно высокий уровень обратной ЭДС.tagскачок напряжения, который может повредить драйвер.
Типичное соединение
Полная пошаговая система должна включать шаговый двигатель, шаговый драйвер, источник питания и контроллер (генератор импульсов). Типичное подключение показано на рисунке 10.

Схема последовательности сигналов управления
Чтобы избежать некоторых сбоев и отклонений, PUL, DIR и ENA должны соблюдать некоторые правила, показанные на следующей диаграмме:


Рисунок 11: Последовательность сигналов управления
Примечание:
a) t1: ENA должен опережать DIR как минимум на 5 мкс. Обычно ENA + и ENA- являются NC (не подключены). См. «Конфигурации разъема P1» для получения дополнительной информации.
b) t2: DIR должен опережать эффективный фронт PUL на 5 мкс, чтобы обеспечить правильное направление;
c) t3: длительность импульса не менее 2.5 мкс;
d) t4: ширина нижнего уровня не менее 2.5 мкс.
Функции защиты
Для повышения надежности драйвер включает в себя некоторые встроенные функции защиты.
| Priority | Время (с) Блиnk | Последовательная волна красного светодиода Описание | |
| 1 | 1 | Защита от перегрузки по току активируется, когда пиковый ток превышает предел. | |
| 2 | 2 | Over-voltagЗащита срабатывает при работе приводаtage больше 96 В постоянного тока |
Когда вышеупомянутые защиты активны, вал двигателя будет свободен или красный светодиод будет мигать. Сбросьте драйвер, повторно включив его, чтобы он работал должным образом после устранения вышеуказанных проблем.
Часто задаваемые вопросы
Если ваш драйвер не работает должным образом, первым делом необходимо определить, является ли проблема электрической или механической по своей природе. Следующий шаг — изолировать системный компонент, вызывающий проблему. В рамках этого процесса вам может потребоваться отключить отдельные компоненты, составляющие вашу систему, и убедиться, что они работают независимо. Важно задокументировать каждый этап процесса устранения неполадок. Возможно, вам понадобится эта документация, чтобы вернуться к ней позже, и эти сведения очень помогут нашим сотрудникам службы технической поддержки определить проблему, если вам потребуется помощь.
Многие проблемы, которые влияют на системы управления движением, могут быть связаны с электрическими помехами, ошибками программного обеспечения контроллера или ошибками в проводке.
Симптомы проблемы и возможные причины
|
симптомы |
Возможные проблемы |
| Мотор не вращается | Нет питания |
| Неправильная настройка разрешения микрошага | |
| Неправильная установка тока DIP-переключателя | |
| Состояние неисправности существует | |
| Драйвер отключен | |
| Мотор вращается в неправильном направлении | Фазы двигателя могут быть подключены наоборот. |
| Водитель виноват | Неправильная установка тока DIP-переключателя |
| Что-то не так с катушкой двигателя | |
| Беспорядочное движение мотора | Управляющий сигнал слишком слабый |
| Управляющий сигнал мешает | |
| Неправильное подключение двигателя | |
| Что-то не так с катушкой двигателя | |
| Текущая настройка слишком мала, нет шагов | |
| Двигатель глохнет при разгоне | Текущая настройка слишком мала |
| Двигатель малоразмерный для применения | |
| Установлено слишком высокое ускорение | |
| Источник питания voltagе слишком низко | |
| Чрезмерный нагрев двигателя и драйвера | Несоответствующий теплоотвод / охлаждение |
| Функция автоматического снижения тока не используется | |
| Слишком высокий ток |
Leadshine Microstep DM860 Руководство пользователя — Скачать [оптимизировано]
Leadshine Microstep DM860 Руководство пользователя — Скачать
На чтение 6 мин Опубликовано Обновлено
Драйверы шаговых двигателей широко используются в различных устройствах, таких как импульсные клипперы, медицинская техника, промышленные роботы и многое другое. Один из популярных драйверов — dm860h — позволяет контролировать двухфазные шаговые двигатели, обеспечивая высокую точность и надежность работы системы.
Правильное подключение драйвера dm860h играет важную роль в обеспечении бесперебойной работы вашей системы. В этой статье мы предлагаем вам пошаговую инструкцию по подключению данного драйвера и предоставляем схему подключения.
Перед подключением драйвера dm860h, обязательно просмотрите их технические характеристики и убедитесь, что он подходит к вашей системе. Затем следуйте этим шагам для правильного подключения:
- Убедитесь, что система выключена и не подключена к источнику питания.
- Подключите два провода шагового двигателя к выходным клеммам драйвера dm860h. Обычно это маркировано как A+ и A-, B+ и B-, но может отличаться в зависимости от производителя.
- Подключите источник питания к входным клеммам драйвера dm860h. Убедитесь, что напряжение питания соответствует требованиям драйвера.
- Подключите контроллер (например, Arduino) к входным клеммам драйвера dm860h. Обычно это маркировано как DIR (направление движения) и PUL (импульсы для шагового двигателя).
- После подключения всех проводов, убедитесь, что соединения надежны и не имеют неполадок.
- Перед включением системы, проверьте все соединения еще раз и убедитесь, что они правильно подключены.
- Теперь вы можете включить систему и начать использовать драйвер dm860h для контроля двигателя.
На схеме подключения драйвера dm860h вы можете увидеть наглядное представление правильного подключения. Следуйте данной инструкции и схеме для успешного подключения драйвера dm860h и обеспечьте бесперебойную работу вашей системы.
Содержание
- Подключение драйвера dm860h к степперному двигателю: шаг за шагом
- Выбор необходимых инструментов
- Подключение драйвера dm860h
- Тестирование и проверка работоспособности
Подключение драйвера dm860h к степперному двигателю: шаг за шагом
Драйвер dm860h является популярным выбором для подключения к степперному двигателю. В этой инструкции мы рассмотрим пошаговую процедуру подключения и настройки данного драйвера.
- Первым шагом необходимо подготовить все необходимые компоненты для работы. Вам понадобится сам драйвер dm860h, степперный двигатель, источник питания, а также соединительные кабели.
- Подключите источник питания к драйверу dm860h. Убедитесь, что напряжение источника питания соответствует требованиям драйвера.
- Подключите степперный двигатель к драйверу dm860h. Для этого необходимо подключить каждую фазу двигателя к соответствующему выходу драйвера. Обычно это делается с помощью соединительных проводов.
- Подключите драйвер dm860h к контроллеру микроконтроллера или компьютеру. Для этого необходимо использовать соединительные кабели, соединяющие выходы драйвера с соответствующими входами контроллера.
- Проверьте правильность подключения, убедившись, что все соединения надежно закреплены и никакие провода не перекрещиваются.
- Настройте драйвер dm860h согласно требованиям вашего проекта. Обычно это включает в себя настройку тока, скорости и микрошагового разрешения.
- После настройки драйвера можете запустить ваше приложение или программу, и проверить работу степперного двигателя. Убедитесь, что двигатель вращается согласно заданным параметрам и перемещается в нужную сторону.
Теперь вы знаете, как подключить драйвер dm860h к степперному двигателю. Следуйте этой инструкции шаг за шагом и настройте вашу систему движения с легкостью.
Выбор необходимых инструментов
Для успешного подключения драйвера dm860h необходимо подготовить следующие инструменты:
- Драйвер dm860h: данный драйвер является основным инструментом для подключения шагового двигателя к контроллеру.
- Шаговый двигатель: выберите шаговый двигатель, совместимый с драйвером dm860h, исходя из требуемых характеристик и нагрузки.
- Источник питания: для работы с драйвером dm860h необходимо обеспечить стабильное питание шагового двигателя. Выберите источник питания, подходящий по напряжению и мощности.
- Контроллер: используйте контроллер, поддерживающий подключение шаговых двигателей и совместимый с драйвером dm860h.
- Провода и разъемы: для соединения драйвера dm860h с шаговым двигателем и контроллером потребуются провода и разъемы.
- Инструменты для монтажа: при подключении драйвера dm860h могут потребоваться инструменты для фиксации и монтажа компонентов.
Не забудьте проверить совместимость выбранных инструментов перед началом подключения. В противном случае, возможны проблемы в работе системы.
Подключение драйвера dm860h
Драйвер dm860h — это современное устройство для управления шаговыми двигателями. Он обеспечивает высокую точность и плавность движения, а также защиту от перегрева и перегрузки.
Чтобы подключить драйвер dm860h, выполните следующие шаги:
- Убедитесь, что питание драйвера и шагового двигателя выключено.
- Подключите источник питания к драйверу dm860h. Убедитесь, что напряжение и ток источника питания соответствуют требованиям драйвера.
- Соедините шаговый двигатель с драйвером. Обратите внимание на правильную полярность подключения фаз двигателя. Рекомендуется использовать экранированный кабель для уменьшения электромагнитных помех.
- Подключите входные и выходные сигналы. Для управления драйвером можно использовать сигналы STEP и DIR, а также дополнительные сигналы для настройки бегового тока, микрошагов и других параметров. Обычно эти сигналы подключаются с помощью разъемов или клеммных колодок.
- Подключите драйвер к контроллеру или источнику управляющих сигналов. В зависимости от способа подключения, это может быть интерфейс pulse/direction, RS485, CAN или другой.
- Выполните настройку параметров драйвера dm860h с помощью программного обеспечения или аппаратных настроек. Важно установить правильные значения текущего, максимального и минимального тока двигателя, скорости вращения и других параметров в соответствии с требованиями вашего приложения.
- Проверьте подключение и настройки. Включите питание и выполните тестовые перемещения и другие операции, чтобы убедиться, что драйвер правильно работает и двигатель отвечает на управляющие сигналы.
Следуя этой пошаговой инструкции, вы сможете успешно подключить драйвер dm860h и использовать его для управления шаговыми двигателями.
Тестирование и проверка работоспособности
После подключения драйвера dm860h необходимо выполнить тестирование и проверку его работоспособности. Процесс проверки включает в себя следующие шаги:
- Убедитесь, что все соединения были правильно установлены и фиксаторы надежно закреплены.
- Подключите драйвер dm860h к источнику питания согласно указаниям, указанным в инструкции.
- Включите источник питания и убедитесь, что индикатор питания на драйвере загорается.
- Подключите шаговый двигатель к драйверу, соблюдая соответствие заземления и фазы.
- Запустите программное обеспечение, предназначенное для управления шаговыми двигателями.
- Проверьте работоспособность двигателя, выполнив простую операцию вперед и назад.
Во время тестирования обратите внимание на следующие симптомы, которые могут указывать на неправильную работу драйвера:
- Шум или вибрация двигателя. Если двигатель издаёт странный шум или трясется, возможно, что настройки драйвера неверны.
- Негативная реакция на команды управления. Если двигатель не отвечает на команды или двигается непредсказуемо, то возможно, что подключение или настройка драйвера неправильны.
- Повышенная нагрузка на двигатель. Если двигатель становится слишком горячим или он плохо справляется с нагрузкой, то это может означать, что контроллер драйвера работает неправильно.
- Проблемы с позиционированием. Если двигатель не устанавливается в нужное положение или не может быть точно позиционирован, возможно потребуются изменения настроек драйвера или проверка механизма передачи.
В результате выполнения тестирования и проверки работоспособности, убедитесь, что драйвер dm860h работает корректно и без проблем. Если вы обнаружите любые неисправности, следуйте рекомендациям, указанным в инструкции по эксплуатации или обратитесь за помощью к производителю.
Драйвер DM860H является популярным инструментом для управления шаговыми двигателями. Он обеспечивает стабильное и точное управление двигателем, позволяет настраивать различные параметры и обладает простым в использовании интерфейсом.
Подключение драйвера DM860H может показаться сложным заданием, особенно для новичков. Однако, с правильной схемой подключения и основными знаниями о работе с электроникой, процесс становится гораздо более понятным.
Прежде чем приступить к подключению драйвера DM860H, важно убедиться, что у вас есть все необходимые компоненты: шаговый двигатель, блок питания, соединительные провода и, конечно, сам драйвер.
Основная задача при подключении драйвера DM860H — правильно соединить его с шаговым двигателем и блоком питания. Для этого необходимо следовать определенной схеме подключения.
Содержание
- Описание драйвера DM860H и его функций
- Области применения драйвера DM860H
- Схема подключения драйвера DM860H
- Список необходимого оборудования для подключения
- Шаги подключения драйвера DM860H к двигателю
- Как подключить драйвер DM860H к контроллеру и источнику питания
Описание драйвера DM860H и его функций
DM860H является одним из моделей шаговых двигателей с микрошаговым водителем, предназначенным для применения в автоматизированных системах контроля движения. Он может управлять двумя фазами шагового двигателя с постоянным током, обеспечивая точное и плавное движение.
Драйвер DM860H имеет несколько основных функций:
- Микрошаговая технология: DM860H поддерживает микрошаговый режим, который позволяет разбить один полный шаг двигателя на более мелкие шаги. Это позволяет достичь более гладкого движения, уменьшить вибрацию и уровень шума мотора.
- Защита от перегрева: Драйвер оборудован защитой от перегрева. Если температура драйвера превышает допустимый уровень, он автоматически снижает ток, чтобы предотвратить повреждение.
- Защита от короткого замыкания: DM860H имеет защиту от короткого замыкания на выходах. Если к двигателю подключен неправильный проводник или происходит короткое замыкание, драйвер отключит питание, чтобы предотвратить повреждение двигателя и драйвера.
- Высокая разрешающая способность: Драйвер DM860H поддерживает различные настройки разрешения микрошагов, включая 1/2, 1/4, 1/8, 1/16, 1/32, 1/64, 1/128 и 1/256. Это позволяет выбрать наиболее подходящий режим для конкретных требований и достичь максимальной точности движения.
- Поддержка двунаправленного управления: DM860H позволяет управлять двигателем в двух направлениях. Это особенно полезно при перемещении или позиционировании объектов в обратном направлении.
- Регулировка тока: Драйвер DM860H имеет возможность регулировки выходного тока для оптимального управления двигателем. Это позволяет установить соответствующий ток в зависимости от требуемой мощности двигателя и нагрузки.
- Широкий диапазон напряжений: DM860H поддерживает широкий диапазон рабочих напряжений, что делает его совместимым с различными источниками питания и позволяет использовать драйвер в различных приложениях.
Эти функции делают драйвер DM860H универсальным и эффективным инструментом для управления шаговыми двигателями в различных приложениях, включая робототехнику, оборудование автоматизации, 3D-принтеры, ЧПУ-станки и другие.
Области применения драйвера DM860H
Драйвер DM860H является частью систем управления шаговыми двигателями и широко применяется в различных областях индустрии. Его функциональные возможности и надежность делают его незаменимым инструментом для управления движением в различных системах.
Вот некоторые области применения драйвера DM860H:
- Автоматизация производства. Драйвер DM860H широко применяется в автоматизированных системах производства, где требуется точное и плавное управление движением различных оборудований, таких как конвейеры, станки, роботы и пр.
- 3D-принтеры и ЧПУ-машинки. Для точного управления движением в основной оси и позиционирования двигателей шаговой системы используется драйвер DM860H. Он обеспечивает стабильное и плавное движение, что особенно важно для создания качественных печатных изделий.
- Медицинская техника. Драйвер DM860H применяется в медицинской технике для контролируемого движения механических устройств, таких как рентгеновские аппараты, аппараты для магнитно-резонансной томографии и пр.
- Робототехника. В робототехнике драйвер DM860H используется для управления движением роботов и манипуляторов. Он обеспечивает точное позиционирование и плавное движение, необходимые для выполнения различных задач.
- Автотранспорт. Драйвер DM860H может применяться в автомобилях и другой автотехнике для управления двигателями шаговых систем. Он обеспечивает точность и эффективность движения, что особенно важно для систем автоматического вождения и других инновационных решений в автотранспортной отрасли.
Это лишь некоторые области применения драйвера DM860H. Его гибкие настройки и возможности сделали его популярным среди разработчиков и инженеров, работающих с шаговыми двигателями. Однако, стоит отметить, что перед использованием драйвера DM860H в конкретной системе необходимо провести тщательные исследование и тесты, чтобы удостовериться в его совместимости и соответствии требованиям системы.
Схема подключения драйвера DM860H
Драйвер DM860H является одним из самых популярных драйверов для шаговых двигателей. Этот драйвер позволяет управлять шаговыми двигателями с высокой точностью и контролировать их скорость и направление вращения. Для правильной работы драйвера необходимо правильно подключить его к питанию и шаговому двигателю.
Схема подключения драйвера DM860H состоит из нескольких основных компонентов:
- Питание
- Шаговый двигатель
- Сигнальные провода
Питание:
Драйвер DM860H подключается к источнику питания постоянного тока. Для этого на драйвере есть два терминала для подключения питания: VCC и GND. Подключите положительный полюс источника питания к VCC, а отрицательный полюс к GND.
Шаговый двигатель:
Для подключения шагового двигателя к драйверу DM860H необходимо использовать соответствующие выходные порты драйвера. У драйвера DM860H есть четыре выходных порта для подключения двухфазных шаговых двигателей. Каждый выходной порт состоит из двух клемм: A+ и A- для фазы A, и B+ и B- для фазы B. Подключите соответствующие выводы шагового двигателя к соответствующим клеммам выходного порта драйвера.
Сигнальные провода:
Драйвер DM860H имеет различные сигнальные входы для управления двигателем. Один из них — это сигнальный вход STEP, который управляет шагом двигателя. Для управления двигателем подайте на вход STEP короткий импульс. Другой сигнальный вход DIR используется для контроля направления вращения двигателя. Подайте логический сигнал на DIR для изменения направления вращения двигателя.
Таким образом, схема подключения драйвера DM860H выглядит примерно следующим образом:
| Подключение | Описание |
|---|---|
| VCC | Положительный полюс источника питания |
| GND | Отрицательный полюс источника питания |
| A+ | Фаза A шагового двигателя |
| A- | Фаза A шагового двигателя |
| B+ | Фаза B шагового двигателя |
| B- | Фаза B шагового двигателя |
| STEP | Сигнальный вход для управления шагом |
| DIR | Сигнальный вход для управления направлением двигателя |
Обратите внимание, что схема подключения может немного различаться в зависимости от конкретных условий использования. Всегда следуйте инструкциям, предоставленным производителем драйвера и шагового двигателя для правильного подключения и настройки.
Список необходимого оборудования для подключения
- Драйвер шагового двигателя DM860H
- Шаговый двигатель
- Источник питания
- Компьютер или контроллер
- Кабель для подключения драйвера и компьютера/контроллера
- Кабели для подключения драйвера и шагового двигателя
Для успешного подключения драйвера DM860H необходимо иметь на руках перечисленное оборудование:
- Драйвер шагового двигателя DM860H: основное устройство, отвечающее за управление и контроль шагового двигателя.
- Шаговый двигатель: используется для преобразования электрического сигнала в механическое движение.
- Источник питания: обеспечивает энергией работу драйвера и двигателя. Необходимо подобрать источник питания с нужными параметрами по напряжению и силе тока.
- Компьютер или контроллер: для программирования и управления драйвером и шаговым двигателем.
- Кабель для подключения драйвера и компьютера/контроллера: используется для передачи данных и сигналов между драйвером и компьютером/контроллером.
- Кабели для подключения драйвера и шагового двигателя: используются для передачи сигналов управления и питания между драйвером и шаговым двигателем.
При наличии всех необходимых компонентов можно приступать к подключению драйвера DM860H и использованию шагового двигателя в вашем проекте.
Шаги подключения драйвера DM860H к двигателю
- Перед началом подключения убедитесь, что питание выключено и отсоедините кабель питания от розетки.
- Подключите питание к драйверу DM860H, используя указанное напряжение и соответствующий разъем.
- Соедините драйвер с двигателем с помощью кабеля, проверив правильность подключения проводов фаз и обмоток.
- Проверьте направление вращения двигателя. Если вам необходимо изменить его, измените подключение фаз двигателя к соответствующим выводам драйвера.
- Подключите контроллер или плату управления к драйверу DM860H, используя соответствующие кабели.
- Правильно установите микропереключатели драйвера, следуя инструкциям и требованиям производителя.
- При необходимости подключите внешние ограничители тока или другие устройства защиты к драйверу.
- Проверьте все подключения, убедитесь, что они надежны и безопасны.
- После всех подключений и настройки драйвера DM860H, включите питание и проверьте его работу в соответствии с инструкциями производителя.
Как подключить драйвер DM860H к контроллеру и источнику питания
Драйвер DM860H – это устройство, которое используется для управления шаговыми двигателями. В данной статье мы рассмотрим, как правильно подключить драйвер DM860H к контроллеру и источнику питания.
Перед началом подключения необходимо убедиться, что у вас есть следующие компоненты:
- Драйвер DM860H;
- Шаговый двигатель;
- Контроллер;
- Источник питания;
- Необходимые кабели для подключения.
Подключение драйвера DM860H к контроллеру и источнику питания происходит следующим образом:
- Подключите источник питания к соответствующим клеммам драйвера DM860H. Обратите внимание на полярность и напряжение источника питания.
- Подключите контроллер к драйверу DM860H с помощью кабеля. Подключите провода в соответствии с схемой подключения контроллера и драйвера.
- Подключите шаговый двигатель к драйверу DM860H. Обычно, шаговой двигатель имеет 4 или 6 выводов, которые необходимо подключить к соответствующим клеммам драйвера.
После завершения подключения необходимо проверить правильность подключения следующим образом:
- Убедитесь, что источник питания подает необходимое напряжение на драйвер DM860H и контроллер.
- Убедитесь, что кабель, соединяющий драйвер DM860H и контроллер, надежно подключен и не имеет повреждений.
- Проверьте, что выводы шагового двигателя правильно подключены к соответствующим клеммам драйвера DM860H.
После проверки подключения, вы можете приступить к использованию драйвера DM860H для управления шаговым двигателем. Рекомендуется ознакомиться с документацией по драйверу и контролеру для правильной настройки и использования.
Надеемся, что данная статья помогла вам разобраться в процессе подключения драйвера DM860H к контроллеру и источнику питания.