
Перейти к основному содержанию
+7 (800) 555-19-56,+7 (495) 221-26-45
Руководство по работе с роботом-манипулятором Dobot Magician содержит подробное описание основных этапов установки, наладки и эксплуатации этого мощного оборудования.
- Установка драйвера и проверка правильности работы оборудования.
- Работа со студией DobotStudio.
- Обучение и воспроизведение. Функции Teaching & Playback.
- Письмо и рисование.
- Лазерная гравировка и гравировка с тенями.
- 3D-печать. Установка инструментов и обзор параметров 3D-печати.
- Приложения Repetier Host и Cura для 3D-печати.
- Оборудования Bluetooth и WIFI.
- Работа с контроллером для джойстика и компьютерной мышью.
- Базовая калибровка.
- Ручное и автоматическое выравнивание.
- Платформа программирования Dobot Blockly.
Время на прочтение
7 мин
Количество просмотров 13K
Здравствуйте! Сегодня мы рассказываем о небольшом настольном многофункциональном роботе манипуляторе DoBot Magician, предназначенном для образования — знакомства с робототехникой, ЧПУ и аддитивными технологиями, основами программирования.
Видео
Небольшой видеообзор даст первое представление об этой роборуке. Подробнее — далее в статье.
DoBot Magician

Характеристики
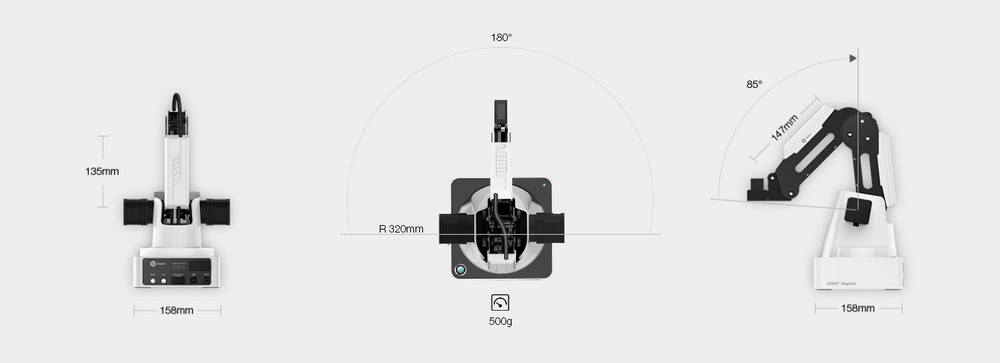
- Осей: 4
- Загрузка: 500г
- Дальность действия манипулятора: 320мм
- Точность: 0,2 мм
- Соединение: USB / Wi-Fi / Bluetooth
- Питание от сети: 100-240В, 50/60 Гц
- Выход блока питания: 12В/7A
- Потребление максимальное, Ватт: 60
- Рабочие температуры, °C: -10 — +60
- Вес робота без насадок, кг: 3,4
- Вес стандартного набора в упаковке, кг: 7,2
- Вес образовательного набора в упак., кг: 8
- Диаметр подставки: 158мм
- Материалы: Алюминиевый сплав 6061, ABS
- Форм-фактор: Настольный
- 3D-принтер: принт макс., мм: 150 × 150 × 150; материал печати: PLA; разрешение: 0,1мм
- Лазер: мощность: 0,5Вт; длина волны: 405нм; напряжение: 12В; TTL trigger ( With PWM Driver )
- Держатель пера: диаметр инструмента: 10мм
- Вакуумная присоска: диаметр: 20мм, давление -35 кПа
- Захват: пневматический, раскрытие до 27,5мм, сила: 8 Ньютонов
- Цена: 106 120 рублей

Уникальный миниробот имеет открытую аппаратно-программную платформу — он оснащен 13 портами ввода-вывода и может работать с двумя десятками языков программирования.
Благодаря комплекту насадок DOBOT Magician может перемещать объекты, выполнять гравировку лазером и 3D-печать, чертить и рисовать.
Распаковка
Робот приходит в такой коробке:

Внутри еще одна.

А в ней, в транспортировочной пене, коробочки поменьше.
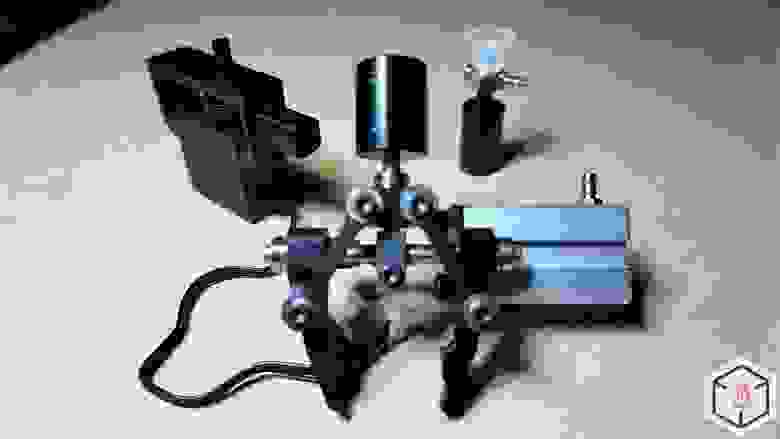
Комплектация

DoBot Magician поставляется в двух вариантах комплектации: Базовый и Образовательный. У нас на обзоре Образовательный набор, базовый отличается от него лишь отсутствием модулей Bluetooth и Wi-Fi, джойстика, лазера и очков для работы с ним.
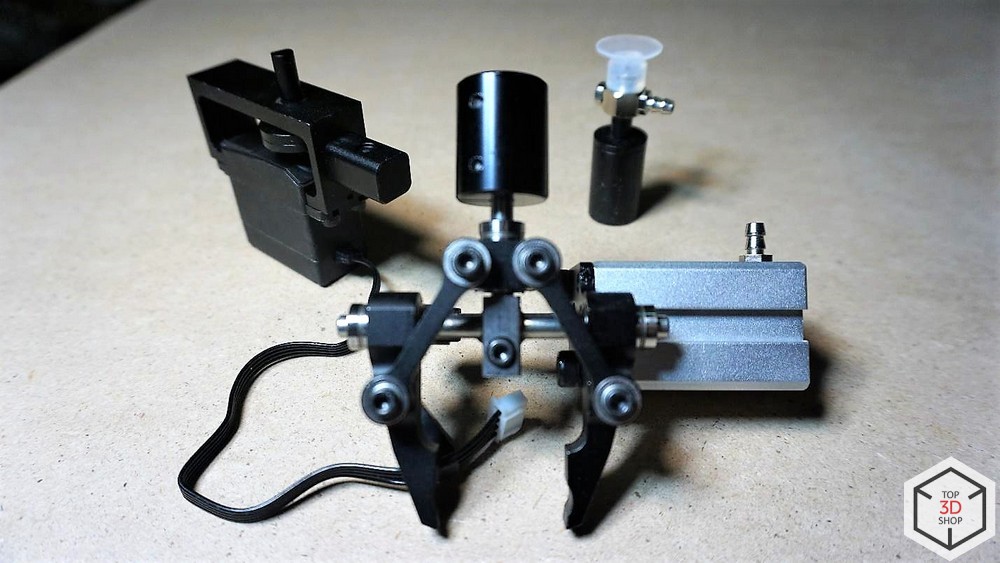
В комплект поставки образовательного робота манипулятора Dobot Magician входят: механический захват, вакуумная присоска, комплект для 3D-печати, лазер, держатель для ручки. Производитель постоянно расширяет ассортимент доступных насадок и аксессуаров, возможен предварительный заказ слайдера, миниатюрного конвейера и модуля компьютерного зрения. В ближайших планах DoBot — выпуск насадки для фрезерования.
Подробнее:
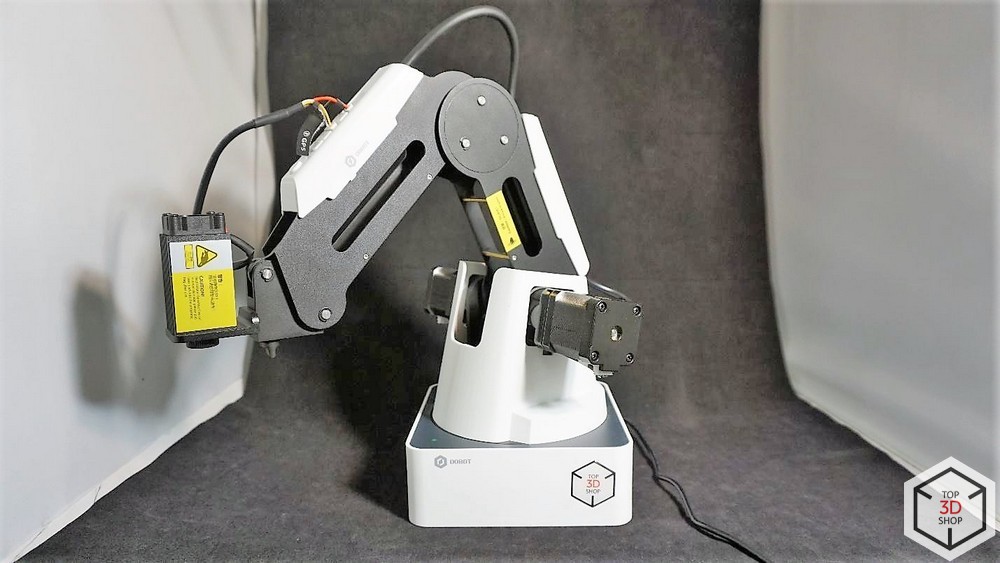
Сам манипулятор, который имеет слоты подключения периферии на втором сочленении и на задней стенке базы робота. Манипулятор приводится в движение тремя шаговыми двигателями, которые оснащены датчиками обратной связи и редукторами.

Серводвигатель, который выступает в роли четвертой оси робота. На нем можно закрепить вакуумный или механический захват.
Захваты приводятся в движение воздушной помпой.

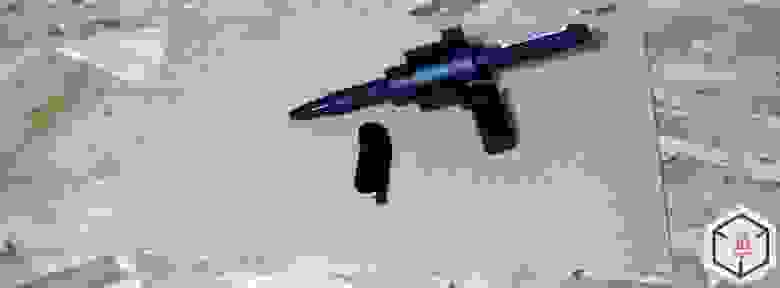
В качестве рабочего инструмента можно установить лазерную головку. В комплекте, для защиты зрения пользователя, есть специальные очки.

Есть держатель пера, для написания текста или рисования, в него можно установить авторучку, лайнер или карандаш диаметром до 10мм.
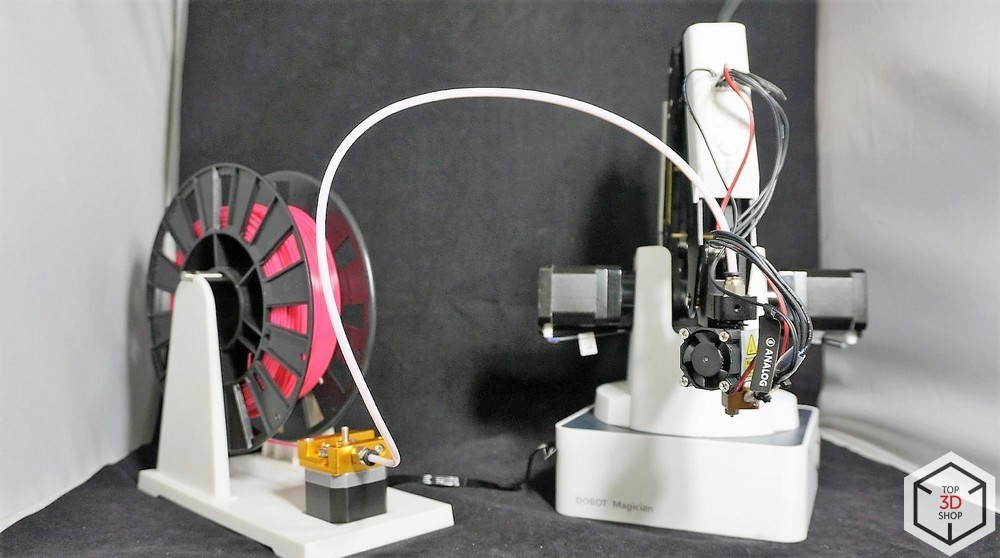
Набор для 3D-печати: блок экструдера, подставка под катушку пластика, катушка PLA, тефлоновая трубка, стекло и малярный скотч. Скотч служит для закрепления стекла на столе.

Управлять манипулятором можно не только с компьютера, но и дистанционно, с помощью джойстика подключенного по Bluetooth. Кабель USB нужен для зарядки аккумулятора в джойстике.

Модули Bluetooth и Wi-Fi.

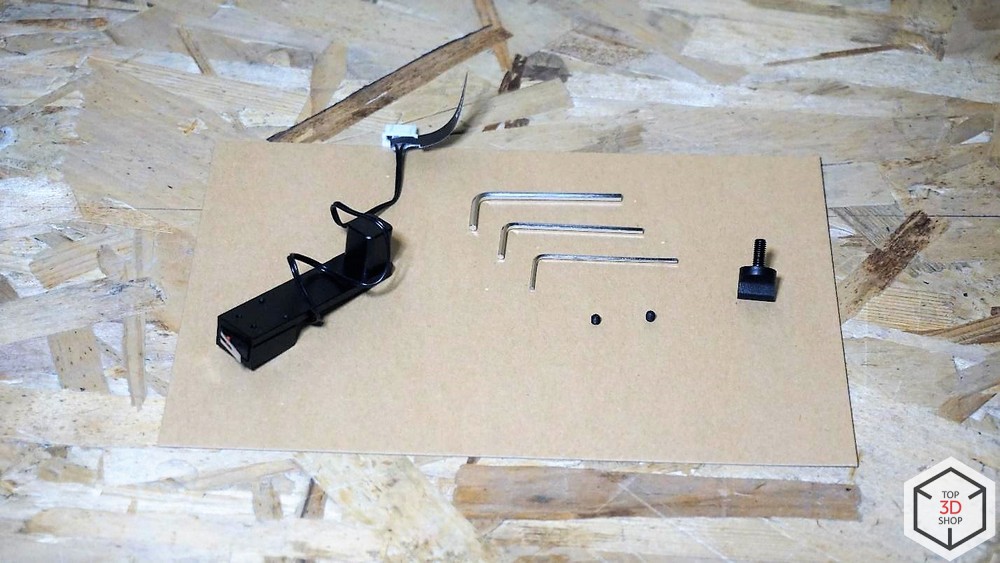
Устройство для автоматической калибровки, запасные винты и шестигранники.

Блок питания, кабель USB для соединения с ПК.

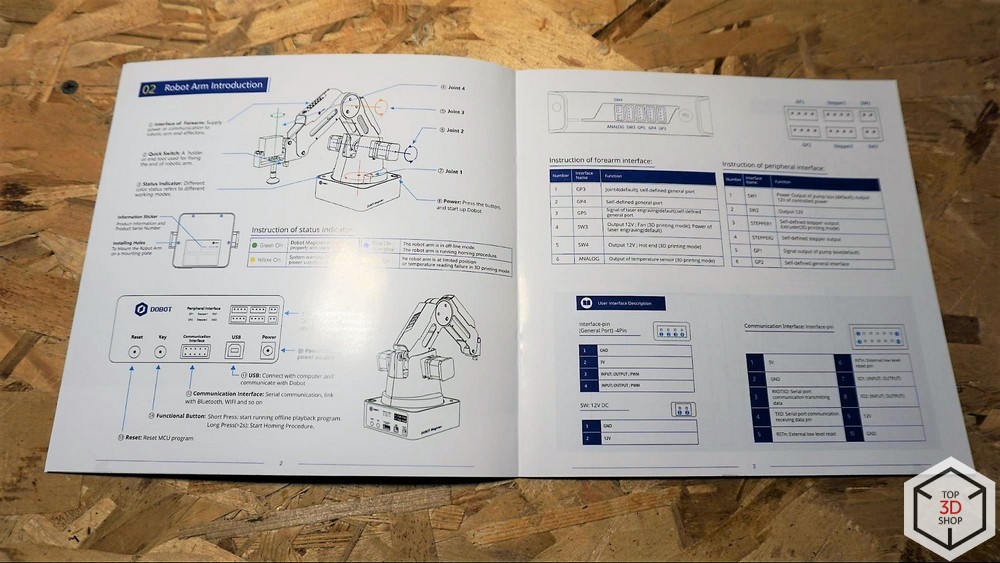
Краткая инструкция.

ПО
Для управления манипулятором надо установить драйвер и программу DoBot Studio, которые можно скачать с официального
сайта
.
Magician совместим со многими актуальными аппаратными и программными средствами, которые широко используются в робототехнике. Например, заявлена поддержка программной платформы ROS (Robot Operating System) и микроконтроллеров Arduino.
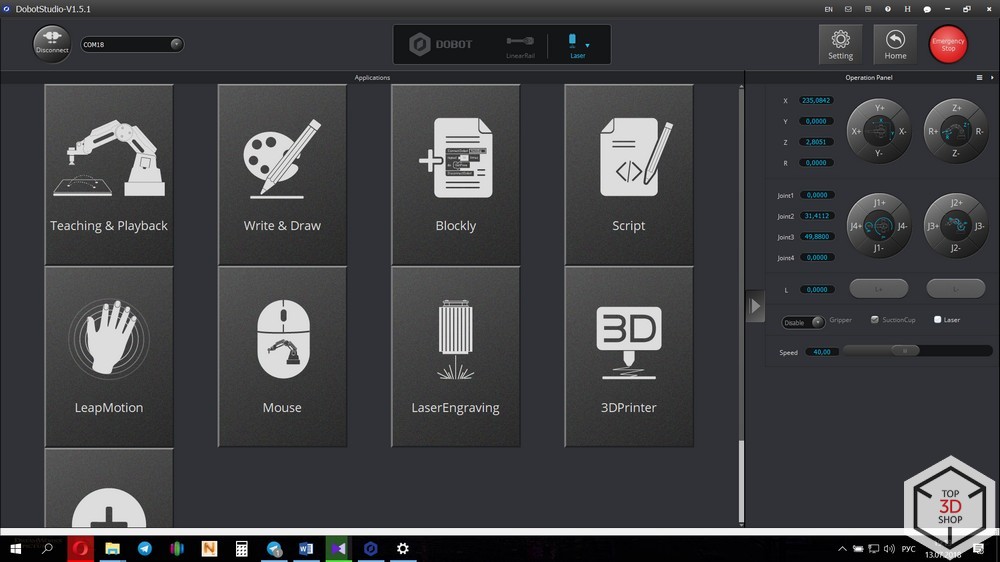
Так выглядит основной экран Dobot Studio.
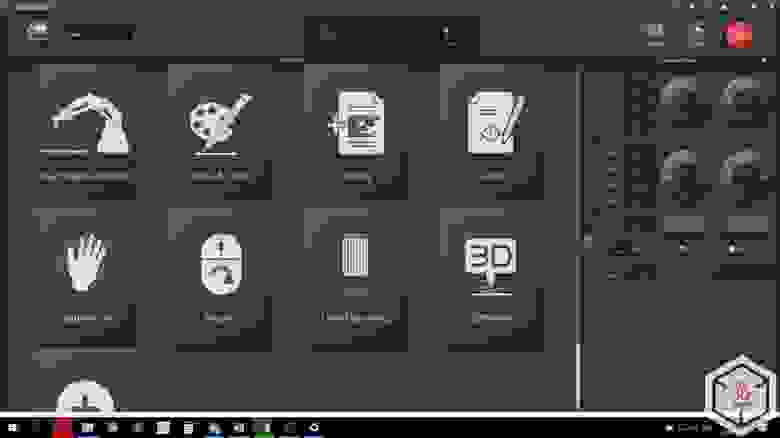
В основном окне мы видим выбор режимов работы робота, справа располагается панель управления манипулятором, чуть выше находится меню настроек, кнопка экстренной остановки и кнопка «Home», а посередине окно выбора инструмента.
Софт DoBot Studio допускает управление несколькими роботами одновременно. По сути, прямо на столе можно создать имитацию сборочной линии, этому также способствует совокупность технических параметров, среди которых приемлемая повторяемость.
Управление
DoBot Magician гибок в управлении — программировать роборуку и управлять ею в режиме реального времени можно с помощью компьютера, смартфона или планшета. В качестве канала связи используется как Wi-Fi или Bluetooth, так и проводное USB-соединение. Робот может распознавать голосовые команды и жесты.
Режимы программирования
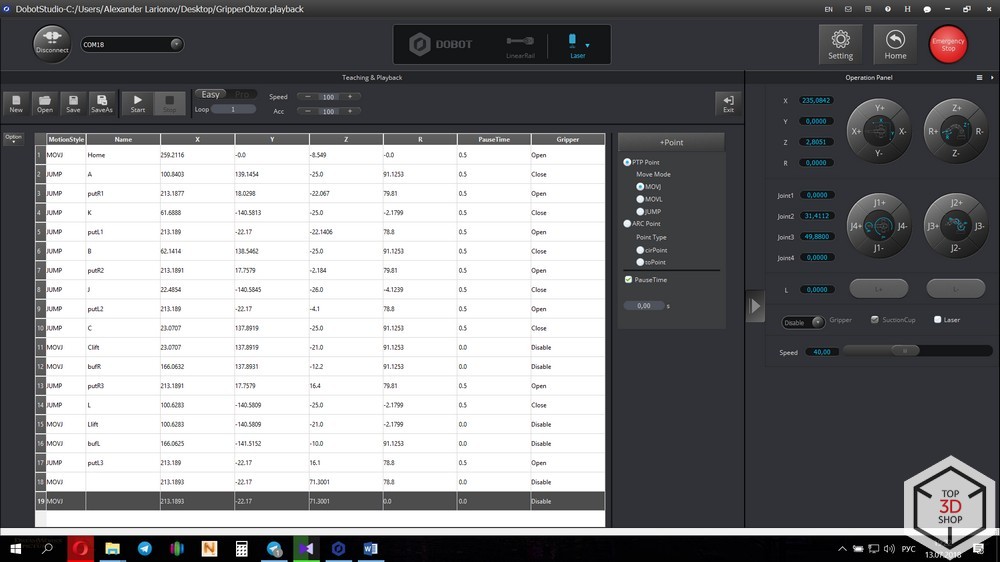
Основным режимом является «Обучение и повторение».
В этом режиме можно создавать управляющие программы, которые робот сможет выполнять единожды или циклично. Обучать робота можно двумя способами:
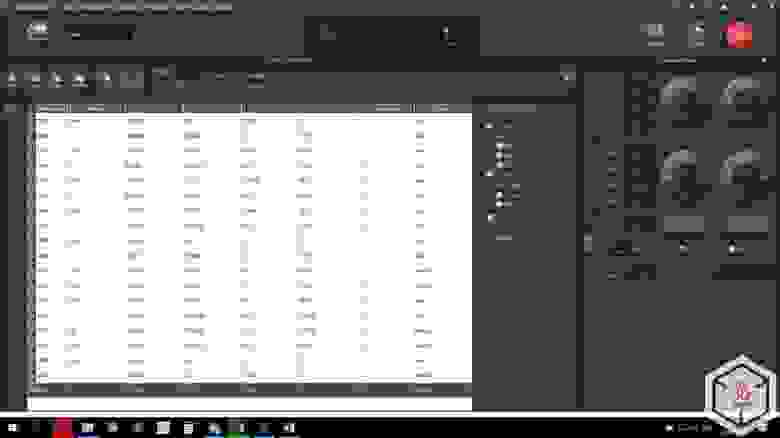
1.: На втором сочленении располагается кнопка, при нажатии на которую с двигателей снимается ток удержания и, благодаря этому, появляется возможность свободно перемещать манипулятор вручную. После перемещения инструмента и отпускания кнопки, координаты запишутся в таблицу.
2.: Переместить инструмент в нужное положение можно и с помощью панели управления, которая расположена в правой части экрана. Двигать можно как линейно, по осям, так и каждое сочленение поочередно. После перемещения, соответствующая координата сохраняется путем нажатия кнопки “+ Point”.
После записи всех координат и настройки способов движения, нажатием кнопки Play, мы запустим выполнение управляющей программы.
Управляющую программу можно загрузить в память манипулятора, чтобы он выполнял работу в режиме офлайн.
Для отладки существует кнопка Step Run, позволяющая запустить программу пошагово, чтобы убедиться в правильности движения.
Два следующих режима, «Блочное программирование» и «Скрипт», созданы для более глубокого изучения программирования и робототехники. В них возможно создание гораздо более сложных алгоритмов поведения, добавление условий выполнения различных сценариев.
Для начинающих, которые еще плохо знакомы с языками программирования, отлично подойдет режим Блочного программирования. Вместо запоминания сложных синтаксических форм и обозначений здесь используются блоки обозначающие условия, циклы, функции, математические преобразования. Тело программы выстраивается путем вставки одних блоков в другие.

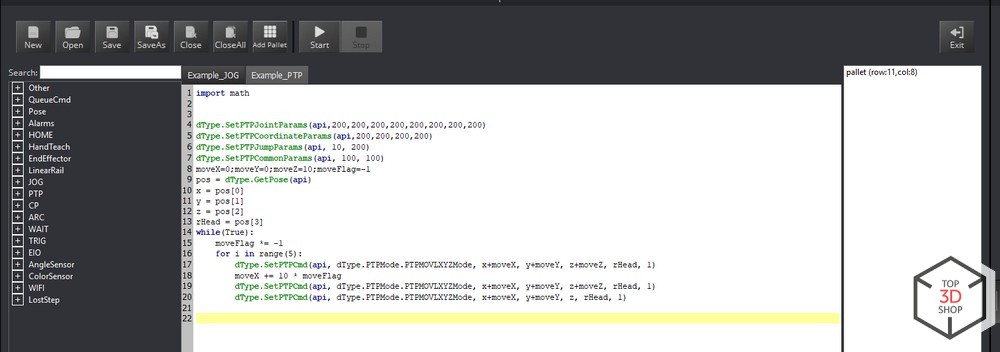
Для продвинутых пользователей существует режим «Скрипты», где они смогут использовать весь потенциал этого робота, используя язык программирования Python.

Режимы работы
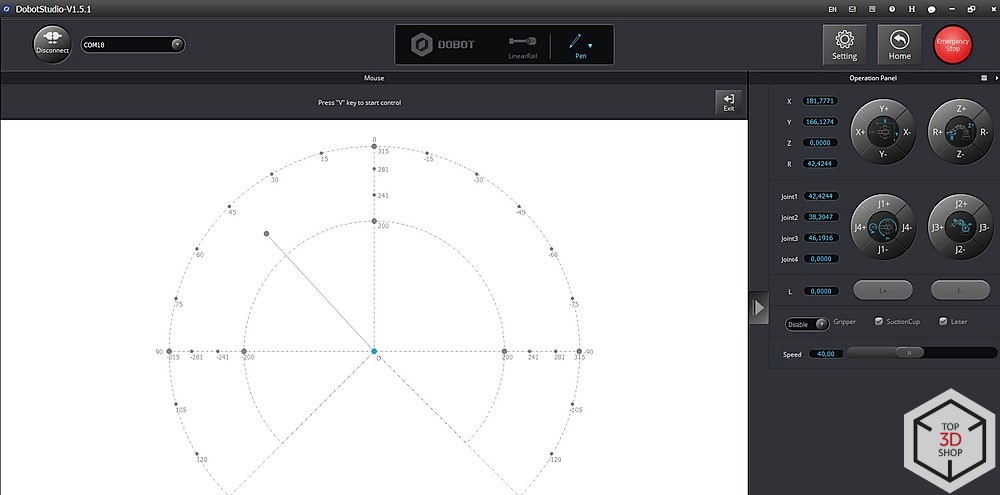
Для того, чтобы оценить максимально возможную область перемещения инструмента “живьем”, можно воспользоваться функцией управления манипулятором с помощью «мыши».

Следующий режим — «Рисование». В качестве инструмента на манипулятор, в специальный подпружиненный держатель, устанавливается ручка.

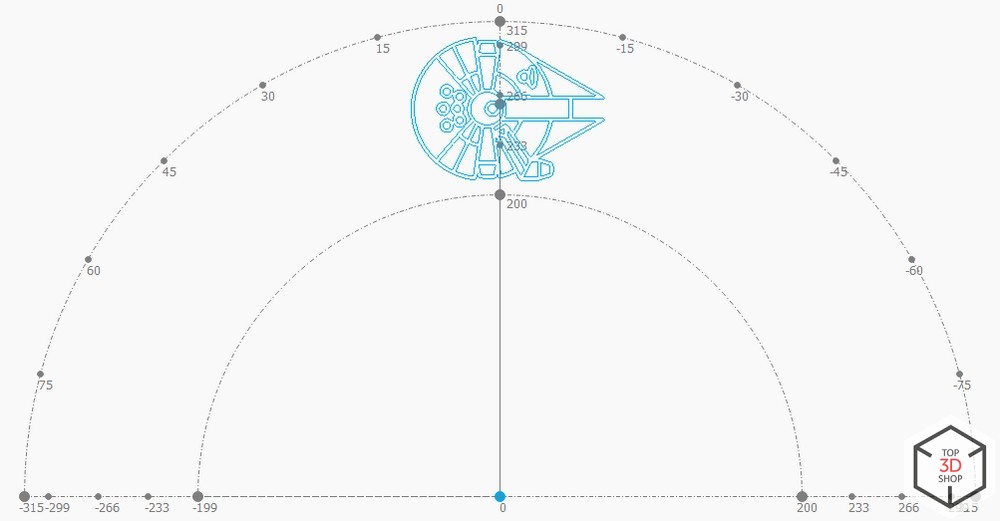
Можно создать надпись, вставить рисунок из встроенной библиотеки или добавить собственный.
Контуры воспроизводятся с высокой точностью.

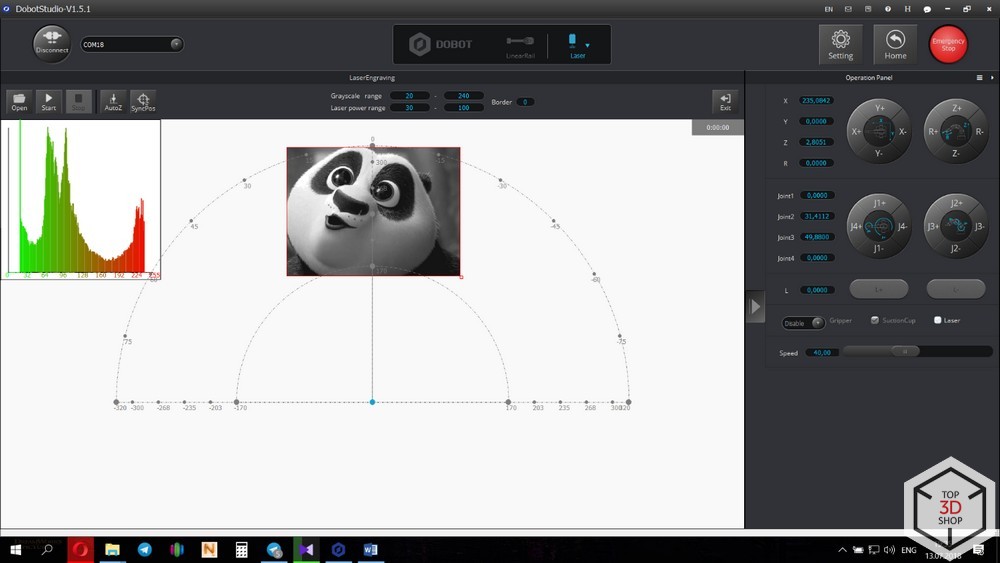
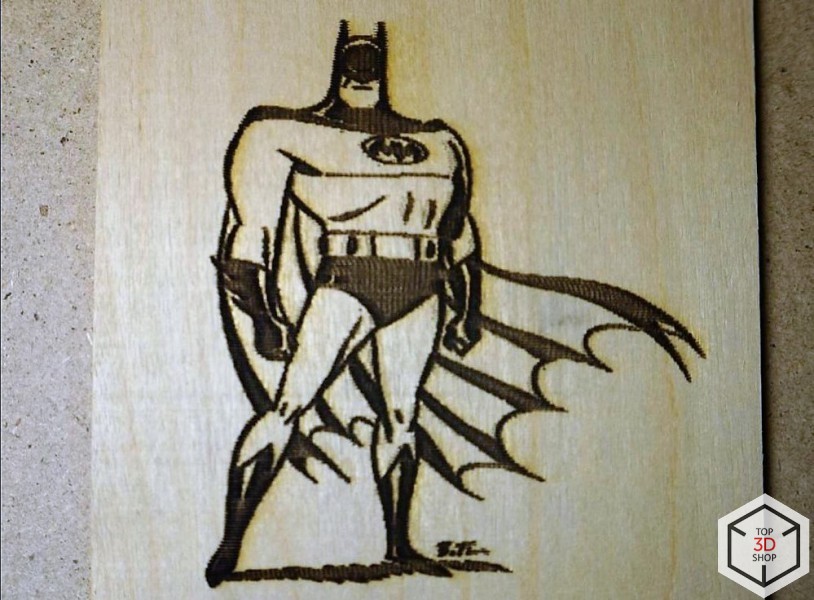
Лазерный гравер. С помощью лазера можно выжигать или гравировать изображения.

Из настроек доступны «Диапазон оттенков серого», минимальная и максимальная мощность, в общих настройках можно отрегулировать скорость и ускорение.

Обработке поддаются многие материалы, такие как дерево, кожа, бумага, картон, акрил.
3D-печать. Для того, чтобы перейти к подготовке файла для печати, потребуется загрузка новой прошивки. При нажатии на кнопку “3D-печать” в главном меню, программа сама предложит изменить прошивку, вам просто нужно дождаться окончания загрузки и установки.

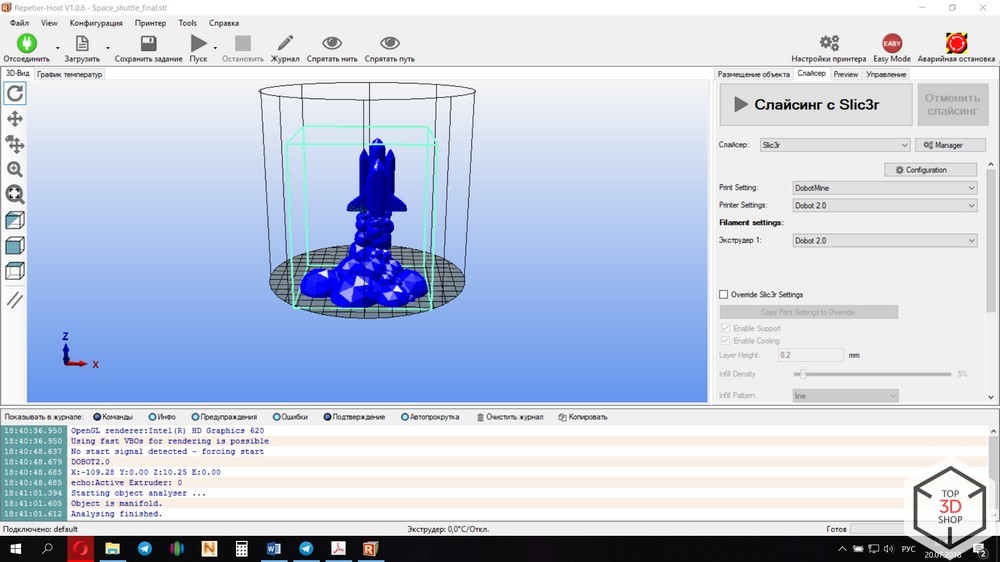
После этого откроется довольно привычное многим 3D-печатникам окно программы Repitier Host.
Здесь мы вбиваем параметры принтера, подгружаем профили печати и можно приступать к слайсингу.

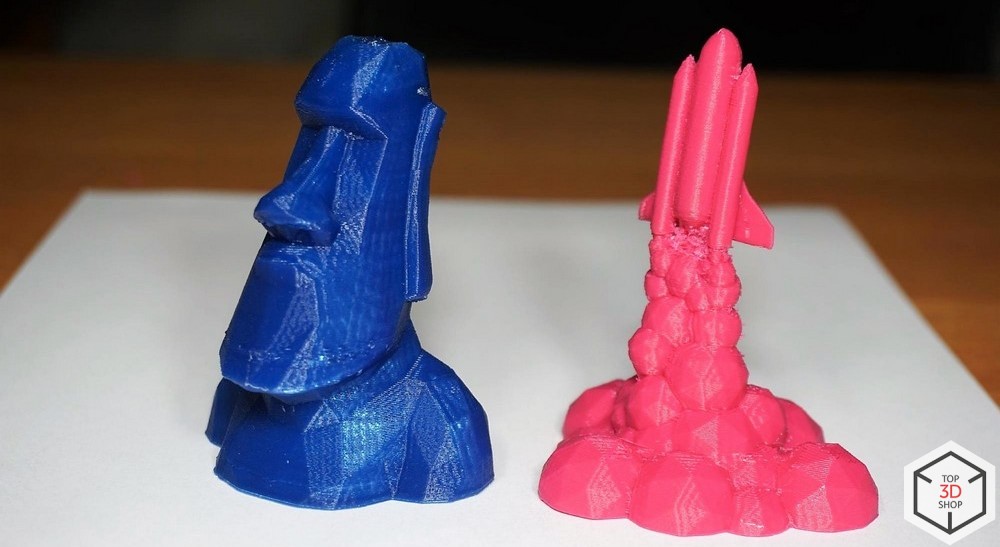
Представленные ниже детали печатались на скорости всего 4 мм/с, поэтому печать заняла около 14 часов. Это стандартное значение скорости, взятое из родного профиля. Для облегчения веса экструдера, двигатель подачи пластика вынесен отдельно на платформу держателя катушки. Из-за этого приходится сокращать или вовсе убирать ретракты в настройках слайсера.

Вот так происходит печать.
К сожалению, из-за специфики строения аппарата, манипулятор имеет значительный люфт на инструменте. Это не мешает точному позиционированию при малых значениях ускорений и при использовании вакуумного или механического захвата. При использовании лазерного модуля и хотэнда, которые имеют немалый вес, этот люфт становится заметен.
Режим ручного управления. Управляя роботом с помощью джойстика, можно совершенствовать свои навыки в управлении подобным устройством и просто весело проводить время.
Если требуется более глубокое понимание принципов работы роботов манипуляторов и их сфер применения, то, с помощью второго DoBot,
конвейера
, инфракрасного и цветового датчика можно собрать небольшую производственную линию.
Для их синхронизации и запуска потребуется подключить оба робота к одному компьютеру и открыть два окна Dobot Studio, в которые загружаются исполняемые программы, которые скачиваются с сайта производителя, для каждого отдельного робота. Перед первым запуском систему нужно откалибровать, для этого в программе есть специальные переменные, которые можно изменять.
Правый манипулятор, по заданному алгоритму и с заданной периодичностью, выкладывает кубики на конвейерную ленту, а левый манипулятор регистрирует наличие кубика на ленте (с помощью инфракрасного датчика), определяет его цвет (с помощью цветового датчика) и помещает кубик в соответствующую стопку.
Назначение
Пример применения DoBot компанией Volkswagen.
DoBot Magician отлично подойдет для обучения детей. Учебный процесс с его участием может начинаться с простейшей игровой формы, благодаря наличию джойстика. Следующий шаг — основы программирования, сначала в блочном редакторе, а потом и скрипты.
Столь наглядное и интерактивное обучение намного эффективнее работы с “сухим” кодом, особенно в самом начале.
Учитывая интересы более продвинутых потенциальных пользователей, разработчики предусмотрели возможность подключения разнообразной периферии, которая не поставляется в комплекте. Это могут быть всевозможные датчики, сервоприводы и шаговые двигатели, светодиодные приборы и множество других электронных устройств, включая микрокомпьютеры и микроконтроллерные платформы, такие как Arduino. Учитывая это, можно рекомендовать DoBot Magician не только школам, но и техникумам, и вузам, как исключительно удачное наглядное пособие.
Уже сегодня этот миниробот используется как одно из основных средств STEM-обучения в ведущих китайских вузах — Университете Цинхуа и Шаньдунском политехе, а также в Австралии — в Сиднейском технологическом университете.
Выводы
Рассматривать качество работы DoBot Magician в сравнении с обычным 3D-принтером или лазерным гравером нельзя. Он никогда не даст качество 3D-печати сравнимое даже с бюджетными принтерами, но это естественно: это не принтер и не гравер, это совершенно другой аппарат, с иными задачами, которые он выполняет отлично.
Если вы работаете в сфере образования и ищете максимально эффективные средства обучения, обратитесь в
Top 3D Shop
— наши сотрудники подберут оптимальное для выполнения ваших задач оборудование.
Хотите больше интересных новостей из мира 3D-технологий?
Подписывайтесь на нас в соц. сетях:



Подписывайтесь на наш телеграм-канал с отборными кейсами роботизации и автоматизации со всего мира: https://tglink.ru/easy_robotics

Здравствуйте! Сегодня мы рассказываем о небольшом настольном многофункциональном роботе манипуляторе DoBot Magician, предназначенном для образования — знакомства с робототехникой, ЧПУ и аддитивными технологиями, основами программирования.
Видео
Небольшой видеообзор даст первое представление об этой роборуке. Подробнее — далее в статье.
DoBot Magician

Характеристики
- Осей: 4
- Загрузка: 500г
- Дальность действия манипулятора: 320мм
- Точность: 0,2 мм
- Соединение: USB / Wi-Fi / Bluetooth
- Питание от сети: 100-240В, 50/60 Гц
- Выход блока питания: 12В/7A
- Потребление максимальное, Ватт: 60
- Рабочие температуры, °C: -10 — +60
- Вес робота без насадок, кг: 3,4
- Вес стандартного набора в упаковке, кг: 7,2
- Вес образовательного набора в упак., кг: 8
- Диаметр подставки: 158мм
- Материалы: Алюминиевый сплав 6061, ABS
- Форм-фактор: Настольный
- 3D-принтер: принт макс., мм: 150 × 150 × 150; материал печати: PLA; разрешение: 0,1мм
- Лазер: мощность: 0,5Вт; длина волны: 405нм; напряжение: 12В; TTL trigger ( With PWM Driver )
- Держатель пера: диаметр инструмента: 10мм
- Вакуумная присоска: диаметр: 20мм, давление -35 кПа
- Захват: пневматический, раскрытие до 27,5мм, сила: 8 Ньютонов
- Цена: 106 120 рублей
Уникальный миниробот имеет открытую аппаратно-программную платформу — он оснащен 13 портами ввода-вывода и может работать с двумя десятками языков программирования.
Благодаря комплекту насадок DOBOT Magician может перемещать объекты, выполнять гравировку лазером и 3D-печать, чертить и рисовать.
Распаковка
Робот приходит в такой коробке:
Внутри еще одна.

А в ней, в транспортировочной пене, коробочки поменьше.

Комплектация

DoBot Magician поставляется в двух вариантах комплектации: Базовый и Образовательный. У нас на обзоре Образовательный набор, базовый отличается от него лишь отсутствием модулей Bluetooth и Wi-Fi, джойстика, лазера и очков для работы с ним.
В комплект поставки образовательного робота манипулятора Dobot Magician входят: механический захват, вакуумная присоска, комплект для 3D-печати, лазер, держатель для ручки. Производитель постоянно расширяет ассортимент доступных насадок и аксессуаров, возможен предварительный заказ слайдера, миниатюрного конвейера и модуля компьютерного зрения. В ближайших планах DoBot — выпуск насадки для фрезерования.
Подробнее:
Сам манипулятор, который имеет слоты подключения периферии на втором сочленении и на задней стенке базы робота. Манипулятор приводится в движение тремя шаговыми двигателями, которые оснащены датчиками обратной связи и редукторами.

Серводвигатель, который выступает в роли четвертой оси робота. На нем можно закрепить вакуумный или механический захват.
Захваты приводятся в движение воздушной помпой.

В качестве рабочего инструмента можно установить лазерную головку. В комплекте, для защиты зрения пользователя, есть специальные очки.

Есть держатель пера, для написания текста или рисования, в него можно установить авторучку, лайнер или карандаш диаметром до 10мм.

Набор для 3D-печати: блок экструдера, подставка под катушку пластика, катушка PLA, тефлоновая трубка, стекло и малярный скотч. Скотч служит для закрепления стекла на столе.

Управлять манипулятором можно не только с компьютера, но и дистанционно, с помощью джойстика подключенного по Bluetooth. Кабель USB нужен для зарядки аккумулятора в джойстике.

Модули Bluetooth и Wi-Fi.

Устройство для автоматической калибровки, запасные винты и шестигранники.
Блок питания, кабель USB для соединения с ПК.

Краткая инструкция.
ПО
Для управления манипулятором надо установить драйвер и программу DoBot Studio, которые можно скачать с официального
сайта
.
Magician совместим со многими актуальными аппаратными и программными средствами, которые широко используются в робототехнике. Например, заявлена поддержка программной платформы ROS (Robot Operating System) и микроконтроллеров Arduino.
Так выглядит основной экран Dobot Studio.
В основном окне мы видим выбор режимов работы робота, справа располагается панель управления манипулятором, чуть выше находится меню настроек, кнопка экстренной остановки и кнопка «Home», а посередине окно выбора инструмента.
Софт DoBot Studio допускает управление несколькими роботами одновременно. По сути, прямо на столе можно создать имитацию сборочной линии, этому также способствует совокупность технических параметров, среди которых приемлемая повторяемость.
Управление
DoBot Magician гибок в управлении — программировать роборуку и управлять ею в режиме реального времени можно с помощью компьютера, смартфона или планшета. В качестве канала связи используется как Wi-Fi или Bluetooth, так и проводное USB-соединение. Робот может распознавать голосовые команды и жесты.
Режимы программирования
Основным режимом является «Обучение и повторение».
В этом режиме можно создавать управляющие программы, которые робот сможет выполнять единожды или циклично. Обучать робота можно двумя способами:
1.: На втором сочленении располагается кнопка, при нажатии на которую с двигателей снимается ток удержания и, благодаря этому, появляется возможность свободно перемещать манипулятор вручную. После перемещения инструмента и отпускания кнопки, координаты запишутся в таблицу.
2.: Переместить инструмент в нужное положение можно и с помощью панели управления, которая расположена в правой части экрана. Двигать можно как линейно, по осям, так и каждое сочленение поочередно. После перемещения, соответствующая координата сохраняется путем нажатия кнопки “+ Point”.
После записи всех координат и настройки способов движения, нажатием кнопки Play, мы запустим выполнение управляющей программы.
Управляющую программу можно загрузить в память манипулятора, чтобы он выполнял работу в режиме офлайн.
Для отладки существует кнопка Step Run, позволяющая запустить программу пошагово, чтобы убедиться в правильности движения.
Два следующих режима, «Блочное программирование» и «Скрипт», созданы для более глубокого изучения программирования и робототехники. В них возможно создание гораздо более сложных алгоритмов поведения, добавление условий выполнения различных сценариев.
Для начинающих, которые еще плохо знакомы с языками программирования, отлично подойдет режим Блочного программирования. Вместо запоминания сложных синтаксических форм и обозначений здесь используются блоки обозначающие условия, циклы, функции, математические преобразования. Тело программы выстраивается путем вставки одних блоков в другие.

Для продвинутых пользователей существует режим «Скрипты», где они смогут использовать весь потенциал этого робота, используя язык программирования Python.
Режимы работы
Для того, чтобы оценить максимально возможную область перемещения инструмента “живьем”, можно воспользоваться функцией управления манипулятором с помощью «мыши».
Следующий режим — «Рисование». В качестве инструмента на манипулятор, в специальный подпружиненный держатель, устанавливается ручка.

Можно создать надпись, вставить рисунок из встроенной библиотеки или добавить собственный.
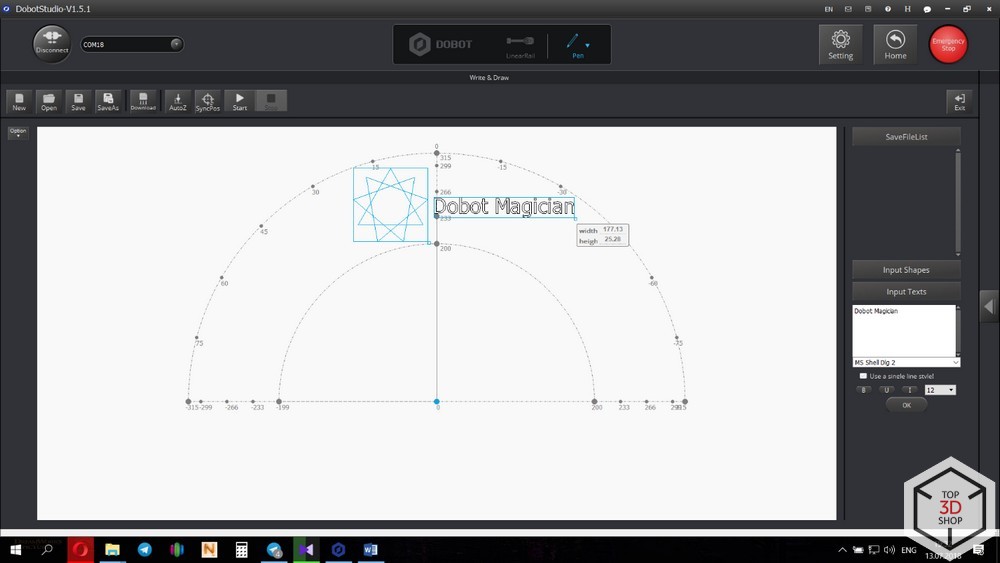
Контуры воспроизводятся с высокой точностью.
Лазерный гравер. С помощью лазера можно выжигать или гравировать изображения.
Из настроек доступны «Диапазон оттенков серого», минимальная и максимальная мощность, в общих настройках можно отрегулировать скорость и ускорение.
Обработке поддаются многие материалы, такие как дерево, кожа, бумага, картон, акрил.
3D-печать. Для того, чтобы перейти к подготовке файла для печати, потребуется загрузка новой прошивки. При нажатии на кнопку “3D-печать” в главном меню, программа сама предложит изменить прошивку, вам просто нужно дождаться окончания загрузки и установки.
После этого откроется довольно привычное многим 3D-печатникам окно программы Repitier Host.
Здесь мы вбиваем параметры принтера, подгружаем профили печати и можно приступать к слайсингу.
Представленные ниже детали печатались на скорости всего 4 мм/с, поэтому печать заняла около 14 часов. Это стандартное значение скорости, взятое из родного профиля. Для облегчения веса экструдера, двигатель подачи пластика вынесен отдельно на платформу держателя катушки. Из-за этого приходится сокращать или вовсе убирать ретракты в настройках слайсера.
Вот так происходит печать.
К сожалению, из-за специфики строения аппарата, манипулятор имеет значительный люфт на инструменте. Это не мешает точному позиционированию при малых значениях ускорений и при использовании вакуумного или механического захвата. При использовании лазерного модуля и хотэнда, которые имеют немалый вес, этот люфт становится заметен.
Режим ручного управления. Управляя роботом с помощью джойстика, можно совершенствовать свои навыки в управлении подобным устройством и просто весело проводить время.
Если требуется более глубокое понимание принципов работы роботов манипуляторов и их сфер применения, то, с помощью второго DoBot,
конвейера
, инфракрасного и цветового датчика можно собрать небольшую производственную линию.
Для их синхронизации и запуска потребуется подключить оба робота к одному компьютеру и открыть два окна Dobot Studio, в которые загружаются исполняемые программы, которые скачиваются с сайта производителя, для каждого отдельного робота. Перед первым запуском систему нужно откалибровать, для этого в программе есть специальные переменные, которые можно изменять.

Правый манипулятор, по заданному алгоритму и с заданной периодичностью, выкладывает кубики на конвейерную ленту, а левый манипулятор регистрирует наличие кубика на ленте (с помощью инфракрасного датчика), определяет его цвет (с помощью цветового датчика) и помещает кубик в соответствующую стопку.
Назначение
Пример применения DoBot компанией Volkswagen.
DoBot Magician отлично подойдет для обучения детей. Учебный процесс с его участием может начинаться с простейшей игровой формы, благодаря наличию джойстика. Следующий шаг — основы программирования, сначала в блочном редакторе, а потом и скрипты.
Столь наглядное и интерактивное обучение намного эффективнее работы с “сухим” кодом, особенно в самом начале.
Учитывая интересы более продвинутых потенциальных пользователей, разработчики предусмотрели возможность подключения разнообразной периферии, которая не поставляется в комплекте. Это могут быть всевозможные датчики, сервоприводы и шаговые двигатели, светодиодные приборы и множество других электронных устройств, включая микрокомпьютеры и микроконтроллерные платформы, такие как Arduino. Учитывая это, можно рекомендовать DoBot Magician не только школам, но и техникумам, и вузам, как исключительно удачное наглядное пособие.
Уже сегодня этот миниробот используется как одно из основных средств STEM-обучения в ведущих китайских вузах — Университете Цинхуа и Шаньдунском политехе, а также в Австралии — в Сиднейском технологическом университете.
Выводы
Рассматривать качество работы DoBot Magician в сравнении с обычным 3D-принтером или лазерным гравером нельзя. Он никогда не даст качество 3D-печати сравнимое даже с бюджетными принтерами, но это естественно: это не принтер и не гравер, это совершенно другой аппарат, с иными задачами, которые он выполняет отлично.
Если вы работаете в сфере образования и ищете максимально эффективные средства обучения, обратитесь в
Top 3D Shop
— наши сотрудники подберут оптимальное для выполнения ваших задач оборудование.
Хотите больше интересных новостей из мира 3D-технологий?
Подписывайтесь на нас в соц. сетях:



Подписывайтесь на наш телеграм-канал с отборными кейсами роботизации и автоматизации со всего мира: https://tglink.ru/easy_robotics
В настоящее время все больше отраслей, в которых для выполнения определенных видов работ применяют роботизированные системы. Это привело к тому, что в российских вузах появились специальности на которых готовят специалистов, разрабатывающих системы управления работой роботов, следящие за корректностью их эксплуатации и ремонта.
На российском рынке учебного оборудования для школ в 2018 году появился робот-манипулятор Dobot Magician, предназначенный для обучения детей управлением и обслуживанием роботизированными системами. Dobot Magician является аналогом манипуляторов, которые все более широко используются в различных отраслях производства. Роботизированная рука позволяет решать целый класс задач с учащимися разного возраста.
Задания учащиеся могут выполнять в двух режимах работы манипулятора:
— режим обучения — основной режим, рекомендованный для учащихся 5-7 классов, а также для учащихся, не имеющих навыков программирования;
— режим программирования в Scratch – для продвинутых учащихся, имеющих навыки программирования.
Также возможно совместное применение этих режимов при обучении.
Однако методических материалов по использованию роботизированной руки в российском сегменте интернета практически нет, особенно для учащихся 5-7 классов, которые не имеют знаний по геометрии, физике и в большинстве не знакомы с программированием.
Для решения данной проблемы совместно с обучающимся на программе дополнительного образования «Прикладная робототехника» был разработан ряд заданий, которые можно использовать для организации учебного процесса у учащихся 5-7 класса, которые начинают осваивать курс, а также для тренировки и поиска новых рациональных решений с учащимися, имеющими опыт в работе с манипулятором.
Задания разработаны для режима обучения.
Режим обучения представляет собой последовательное совершение с роботом действий, которые при запуске программы он должен полностью повторить. Для этого учащийся задает координаты точек, в которых робот должен будет побывать, перемещая стрелу робота последовательно от точки к точке. При включении робота все его двигатели блокируются, поэтому для перемещения нужно нажать и удерживать во время всего перемещения кнопку с изображением замка, расположенную на стреле робота. Как только кнопка отпущена, робот фиксирует и заносит в таблицу координаты точки, в которой отпустили кнопку.
Таблица состоит из 8 колонок.
Координаты точек x, y и z записываются в колонки 3, 4 и 5 соответственно.
Колонка 1 определяет тип движения робота: JUMP – П-образная траектория, самая безопасная на начальных этапах обучения, MOVL – перемещение между двумя точками по прямой, MOVJ – перемещение между двумя точками с минимальным вращением всех двигателей, ARC POINT – перемещение по 3-м точкам по дуге окружности.
Колонка 2 Имя необходима для разделения строчек таблицы на отдельные блоки выполнения работы.
Колонка 6 определяет угол поворота насадки при работе с вакуумным и пневматическим захватами.
Колонка 7 определяет задержку по времени в секундах перед выполнением шага.
Колонка 8 определяет режим работы насадки.
Данный режим не позволяет учащимся получить навыки программирования, т.к. робот выполняет команды только построчно и последовательно. Повторение того или иного действия происходит путем копирования и добавления соответствующих строк, что приводит к увеличению объема таблицы.
С другой стороны, данный режим более гибкий по сравнению с режимом программирования, т.к. позволяет по ходу выполнения программы корректировать отдельные ее ячейки. Кроме того, в данном режиме предусмотрена пошаговая имитация выделенной строчки таблицы, что позволяет учащимся без запуска программы увидеть большинство недостатков и неточностей, допущенных при составлении таблицы.
На более высоком уровне учащиеся в режиме обучения осваивают навыки алгоритмизации при помощи математических знаний сами рассчитывают последовательно точки, в которые робот должен прийти. При этом движения и перемещения робота становятся более точными.
Ниже представлен ряд заданий и пример их реализации, подготовленный учащимся 7 класса.
Для всех разработанных заданий действуют ограничения:
— Кубик не должен попадать за пределы очерченной зоны.
— Нельзя касаться кубиков руками или подталкивать их другими предметами.
Техника безопасности:
— При разрушении преграды или конструкции из кубиков необходимо прервать программу кнопкой аварийной остановки и начать отладку программы пошагово.
— Не допускать упирания стрелы робота в стол или в нижестоящие кубики, в этом случае возможна дальнейшая некорректная работа робота.
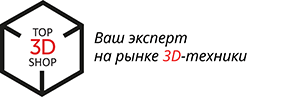
Задание 1. Зазеркалье. На листе бумаги разлиновываются места начального и конечного положения кубиков. Кубики устанавливаются, как показано на рисунке 1 слева или справа. Перед кубиками устанавливается преграда (полоса на рисунке). Задача учащихся переместить кубики слева направо по цветам, как показано на рисунке, или наоборот.
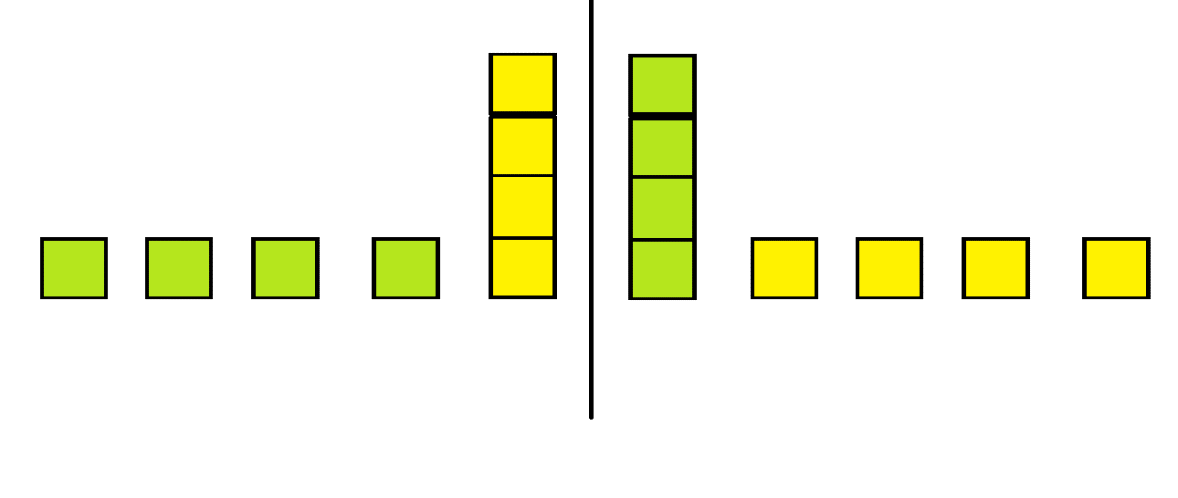
Рис.1 Перестановка кубиков через барьер, вид сбоку.
При выполнении задания необходимо учесть, что размер квадрата, куда устанавливается кубик должен быть чуть больше размеров кубика из-за неточностей перемещений стрелы робота. Лист бумаги, на который нанесена линовка, необходимо закрепить во избежание падения кубиков или перемещения листа по столу.
На рисунке 2 представлен образец выполнения данной задачи учащимся. Особенность данного выполнения в том, что кубики в составляемой после перемещения башне устанавливаются с поворотом 450 через один.
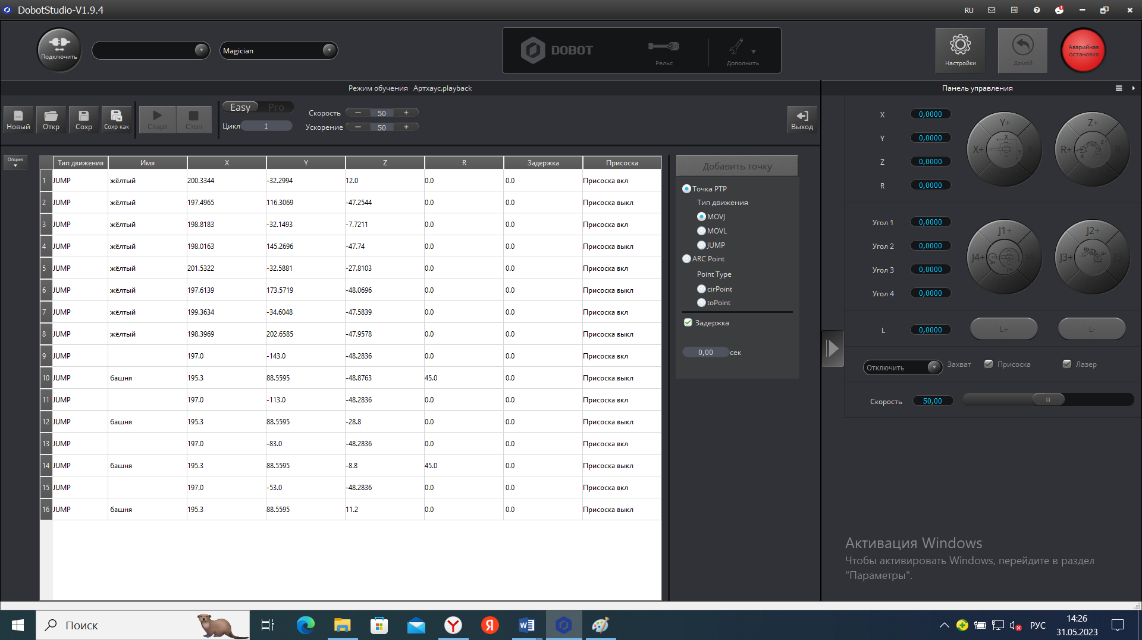
Рис.2 Таблица для выполнения задания «Зазеркалье».
Задание 2. Лабиринт. На столе в пределах рабочей зоны манипулятора из подручных средств собирается лабиринт. Задача учащихся вывести кубик из лабиринта за наименьшее время. Возможно выполнение обратной задачи: провести кубик в самую дальнюю точку лабиринта.
При выполнении задания необходимо учесть, что стенки лабиринта не должны быть жестко закреплены, чтобы при касании их кубиком или роботом это было заметно. Проходы лабиринта необходимо сделать на 1 – 2 мм больше размеров кубика.
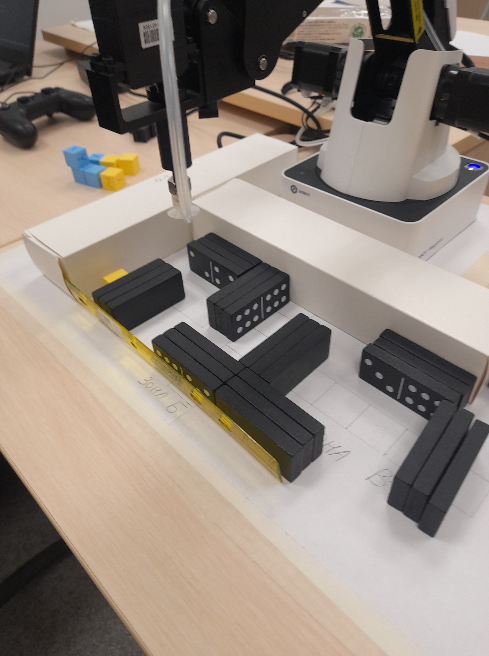
Рис. 3 Лабиринт
На рисунке 4 представлен образец выполнения данной задачи учащимся.
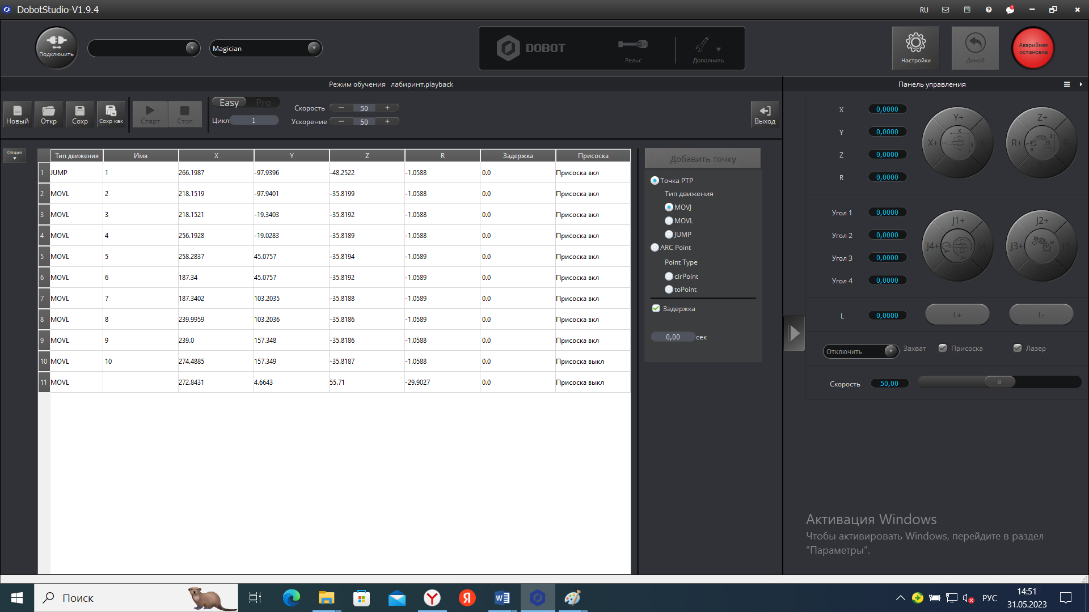
Рис. 4 Таблица для выполнения задания «Лабиринт».
Задание 3. Винтовая лестница. На столе в пределах рабочей зоны манипулятора выкладывается одна или несколько стопок из домино. Задача учащихся установить все костяшки одна на другую с поворотом 10 или 20 градусов относительно предыдущей, получив устойчивую конструкцию.
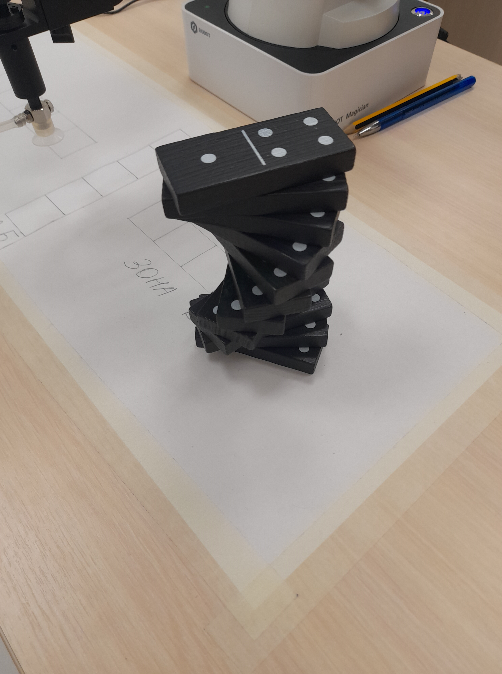
Рис.5 Винтовая лестница
При выполнении задания необходимо учесть, что костяшки домино должны иметь хотя бы одну гладкую поверхность для вакуумного захвата. Допускается выполнение данного задания пневматическим захватом при ширине костяшки не более 25 мм.
Перед выполнением задания рекомендуется объяснить учащимся понятия центра масс, сила тяжести; условие равновесия твердых тел, при котором конструкция будет устойчивой, а также на примерах объяснить, когда система тел находится в устойчивом равновесии (Пизанская башня, человек на стуле, раскачивающаяся лодка и т.д.). Предварительно следует учесть, что насадка поворачивается не на 3600, а на 3200. Поэтому если угол выйдет за пределы максимального, программа выпадет в ошибку.
На рисунке 4 представлен образец выполнения данной задачи учащимся с углом поворота 200.
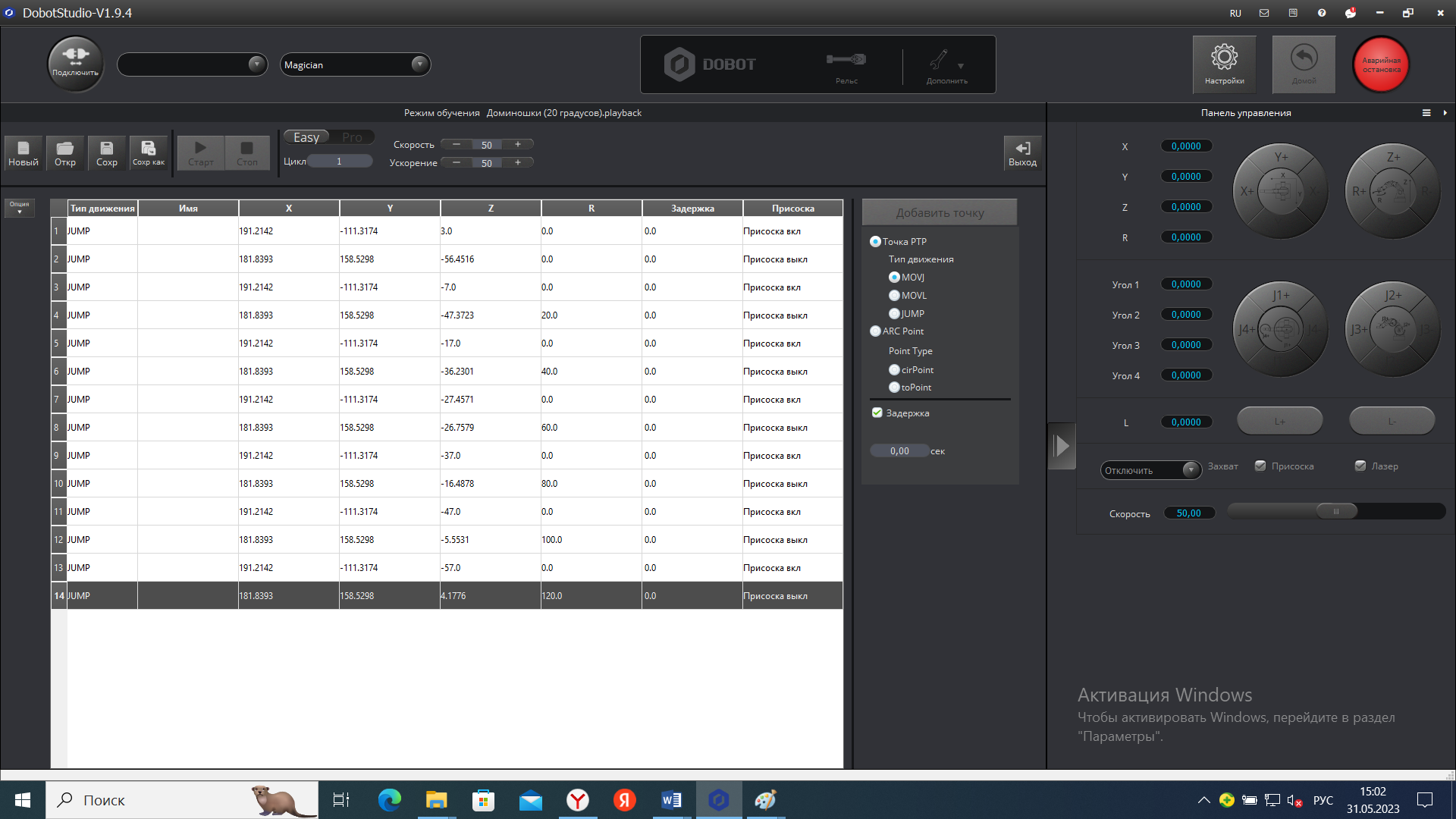
Рис. 6 Таблица для выполнения задания «Винтовая лестница»
На чтение 3 мин Опубликовано Обновлено
Собрать роботизированный манипулятор Dobot Magician может показаться сложной задачей, но с нашей подробной инструкцией вы сможете справиться с этим в легкую. Dobot Magician — удивительное устройство, которое сочетает в себе простоту в использовании и множество возможностей. Он может быть использован в школах, университетах, научных лабораториях и даже дома для изучения основ программирования, робототехники и механики.
Перед тем как приступить к сборке, убедитесь, что у вас есть все необходимые компоненты и инструменты. В комплекте с Dobot Magician поставляется подробная инструкция на английском языке, однако мы предоставляем вам собственную инструкцию на русском языке, чтобы помочь вам шаг за шагом собрать манипулятор.
Важно помнить, что сборка манипулятора требует аккуратности и внимания. Будьте осторожны при работе с электронными компонентами и не пропускайте никаких шагов инструкции.
Приступим к сборке! Первым шагом будет сборка основы манипулятора. Вам потребуется фрейм Dobot Magician, 4 ножки и 4 болта. Следуйте указаниям в инструкции для правильного монтажа. Привлеките внимание к каждому деталю и убедитесь, что все детали закреплены надежно и качественно.
Следующим шагом будет сборка руки манипулятора. Вам потребуются ось X, ось Y, ось Z, энкодерный двигатель, металлический комплект G apertrure, гарнитурный двигатель и некоторые другие компоненты. Внимательно следуйте инструкции и проверьте, что все детали правильно собраны. Когда рука манипулятора будет готова, убедитесь, что она свободно двигается и готова к следующим шагам.
Подробная инструкция сборки роботизированного манипулятора Dobot Magician
Содержание
- Подробная инструкция сборки роботизированного манипулятора Dobot Magician
- Шаг 1: Распаковка комплекта
- Шаг 2: Подготовка деталей
Подробная инструкция сборки роботизированного манипулятора Dobot Magician
Данный гайд содержит пошаговую инструкцию по сборке роботизированного манипулятора Dobot Magician. Придерживаясь этой инструкции, вы сможете легко и быстро собрать свой собственный манипулятор.
- Распакуйте все компоненты, которые поставляются вместе с Dobot Magician. Удостоверьтесь, что вам доступны все необходимые детали.
- Подготовьте основу для манипулятора, следуя указаниям в руководстве.
- Установите подставку для сервомоторов на основе и закрепите ее при помощи винтов.
- Установите шаговые двигатели и подключите их к соответствующим разъемам на основе.
- Установите гриппер на манипулятор и закрепите его винтами.
- Подключите кабели от шаговых двигателей к соответствующим разъемам на основе.
- Подключите устройство управления манипулятором к компьютеру при помощи USB-кабеля.
- Загрузите необходимое программное обеспечение для управления манипулятором на ваш компьютер.
- Следуйте инструкциям по настройке программного обеспечения и подключению манипулятора к нему.
- Протестируйте работу манипулятора, выполняя простые задания и проверяя его функциональность.
Теперь у вас есть готовый роботизированный манипулятор Dobot Magician, который вы можете использовать для различных задач. Пользуйтесь им с удовольствием!
Шаг 1: Распаковка комплекта
Перед началом сборки роботизированного манипулятора Dobot Magician необходимо распаковать комплект и проверить наличие всех компонентов. Убедитесь, что в коробке присутствуют:
- Основная платформа: основание, которое служит основой для сборки манипулятора;
- Рука: состоит из нескольких элементов, включая стойку, два плеча и манипулятор для схватывания предметов;
- Электронная плата управления: отвечает за управление движением робота;
- Датчики: используются для взаимодействия с окружающей средой;
- Кабели и крепежные элементы: необходимы для подключения компонентов и сборки робота.
После того, как вы убедились в наличии всех компонентов, можно переходить к следующему шагу сборки.
Шаг 2: Подготовка деталей
Перед началом сборки роботизированного манипулятора Dobot Magician необходимо подготовить все необходимые детали. В этом шаге мы рассмотрим каждую деталь, которая будет использоваться в процессе сборки.
Для сборки Dobot Magician вам понадобятся следующие детали:
| Деталь | Количество |
|---|---|
| Рама | 1 |
| База | 1 |
| Верхняя часть | 1 |
| Левая плечевая деталь | 1 |
| Правая плечевая деталь | 1 |
| Левая подвижная часть | 1 |
| Правая подвижная часть | 1 |
| Маятниковое колесо | 1 |
| Контроллер | 1 |
| Держатель инструментов | 1 |
Убедитесь, что у вас есть все эти детали перед началом сборки. При отсутствии какой-либо детали обратитесь к поставщику для ее получения.

- Manuals
- Brands
- Dobot Manuals
- Robotics
- Magician
- User manual
-
Contents
-
Table of Contents
-
Bookmarks
Quick Links
User Guide
Dobot Magician
User Guide
Issue: V1.5.1
Date: 2018-09-11
Shenzhen Yuejiang Technology Co., Ltd
Related Manuals for Dobot Dobot Magician
Summary of Contents for Dobot Dobot Magician
-
Page 1
User Guide Dobot Magician User Guide Issue: V1.5.1 Date: 2018-09-11 Shenzhen Yuejiang Technology Co., Ltd… -
Page 2
Even if follow this document or any other related instructions, Damages or losses will be happen in the using process, Dobot shall not be considered as a guarantee regarding to all security information contained in this document. -
Page 3
Dobot Magician User Guide Preface Preface Purpose This Document describes the functions, technical specifications, installation guide and system commissioning of Dobot Magician, making it easy for users to fully understand and use it. Intended Audience This document is intended for: Customer Engineer … -
Page 4: Table Of Contents
Precautions ……………………2 Important Safety Notice …………….3 Quick Start ………………….. 4 Connecting Cables to the Dobot Magician …………… 4 Installing the DobotStudio ………………..5 System Requirements ………………5 Obtaining the DobotStudio Package …………..6 Installing the DobotStudio ………………. 6 Verifying the Installation ………………
-
Page 5
Dobot Magician User Guide Contents Installing a Writing Kit ………………54 Connecting the DobotStudio …………….55 Importing Image Files and Setting Writing Parameters ……..57 Adjust the Position of the Pen Nib …………..63 Performing Laser Engraving Tasks …………….. 65 Installing a Laser Kit ……………… -
Page 6: Security Precautions
People cannot repair and disassemble the robotic arm without professional training. If there is a problem with the robotic arm, please contact Dobot technical support engineer in time. Please comply with the relevant laws to deal with the product which is scrapped, and …
-
Page 7: Precautions
If the coordinates of the Dobot Magician shown on the DobotStudio are abnormal, please press the Reset button on the back of the base to reset Dobot Magician or click Home on the DobotStudio page to perform homing. During resetting, Dobot Magician will disconnect from the PC automatically and the …
-
Page 8: Important Safety Notice
When using the 3D printing module, the heating rod will produce temperatures up to 250℃, please be careful! DO NOT put hands into the operating zone while the Dobot is running. Not doing so runs the risk of bruising and/or pinching.
-
Page 9: Quick Start
Dobot Magician User Guide Quick Start This topic briefly describes how to operate the Dobot Magician with the software DobotStudio, allowing you to quickly know and use the robotic arm. Figure 2.1 shows the process of getting started with the Dobot Magician.
-
Page 10: Installing The Dobotstudio
Dobot Magician User Guide Figure 2.2 Connect the Dobot Magician to your computer Connect the Dobot Magician to the electrical outlet with the supplied power adapter, as shown in Figure 2.3. Figure 2.3 Connect the Dobot Magician to the electrical outlet…
-
Page 11: Obtaining The Dobotstudio Package
2 Quick Start Dobot Magician User Guide Obtaining the DobotStudio Package Before using Dobot Magician, download the Windows DobotStudio package from https://www.dobot.cc/downloadcenter.html. The macOS version is also downloadable in this URL. Installing the DobotStudio Prerequisites The DobotStudio package has been obtained.
-
Page 12
Dobot Magician User Guide Figure 2.6 The DriverSetup(X64) dialog box Click INSTALL to install the Dobot Magician driver. When the driver is installed successfully, the The drive is successfully Pre-installed in advance! dialog box is displayed, as shown in Figure 2.7. -
Page 13: Verifying The Installation
2.2.4.2 Verifying the Dobot Magician Driver If an available COM port is displayed on the upper left corner of the DobotStudio page after the robotic arm is powered on, as shown in Figure 2.9, the Dobot Magician driver is installed successfully.
-
Page 14: Powering On/Off The Dobot Magician
Figure 2.12. Once the robotic arm is powered on, the LED indicator turns yellow, and all the stepper motors lock. And then wait about seven seconds, a short beep sound will be heard, and the LED indicator turns from yellow to green. Now the Dobot Magician is ready to use.
-
Page 15: Getting Started
During the shutdown process, watch your hand. Getting Started This topic describes how to use the Dobot Magician to complete the teaching & playback function by saving three points in the MOVJ mode, allowing you to get the basic knowledge of the usage of the robotic arm.
-
Page 16
2 Quick Start Dobot Magician User Guide Figure 2.13 The DobotStudio page with a beginner guide Click Connect on the DobotStudio page, as shown in Figure 2.14. The Question dialog box is displayed, as shown in Figure 2.15. Figure 2.14 Click Connect Figure 2.15 The Question dialog box… -
Page 17
2 Quick Start Dobot Magician User Guide Click OK. Because this section is for quick access to the Dobot Magician only and no high accuracy is required. When Connect changes to Disconnect, it means that the DobotStudio is connected the Dobot Magician, as shown in Figure 2.16. -
Page 18
2 Quick Start Dobot Magician User Guide Figure 2.17 Click Teaching & Playback NOTE After reading a beginner guide on the Teaching & Playback page, as shown in Figure 2.18, click to close it. Figure 2.18 Teaching & Playback page Select PTP Point >… -
Page 19
Figure 2.20 The Cartesian coordinate of point A NOTE Apart from hand-guided teaching, you can accomplish a teaching task by jogging the Dobot Magician in the Cartesian or Joint coordinate system, as shown in Figure 2.21. Issue V1.0 (2018-09-11) User Guide… -
Page 20
2 Quick Start Dobot Magician User Guide Figure 2.21 Jog the Dobot Magician in the Cartesian or Joint coordinate system Move the robotic arm to other two locations such as points B and C by referring to the method of creating point A above, as shown in Figure 2.22. The robotic arm will save the Cartesian coordinates corresponding to these two points. -
Page 21
2 Quick Start Dobot Magician User Guide Figure 2.23 Enter 3 in the Loop text box Click Start to perform the motions taught above, as shown in Figure 2.24. The robotic arm will stop after playing back the steps for three times. -
Page 22
2 Quick Start Dobot Magician User Guide Figure 2.25 Click Exit Issue V1.0 (2018-09-11) User Guide Copyright © Yuejiang Technology Co., Ltd. -
Page 23: Introduction
It also supports secondary development by various extensible I/O interfaces, which really makes your creativity and imagination increase without any limitation. Appearance and Constitute Dobot Magician consists of Abase, Rear Arm, Forearm, and end-effector, etc. Figure 3.1 shows the appearance. Figure 3.1 The appearance of Dobot Magician…
-
Page 24
3 Introduction Dobot Magician User Guide Figure 3.2 Workspace of Dobot Magician (1) Figure 3.3 Workspace of Dobot Magician (2) Issue V1.0 (2018-09-11) User Guide Copyright © Yuejiang Technology Co., Ltd. -
Page 25: Coordinate System
3 Introduction Dobot Magician User Guide Coordinate System Dobot Magician has two types of coordinate system, the joint one and the Cartesian one, as shown in Figure 3.4 and Figure 3.5 respectively. Figure 3.4 Joint coordinate system Figure 3.5 Cartesian coordinate system Joint coordinate system: The coordinates are determined by the motion joints.
-
Page 26: Motion Function
This topic describes jogging mode by the GUI operation of DobotStudio. Cartesian coordinate system mode Click X+, X- and Dobot Magician will move along X-axis in the negative or positive direction. Click Y+, Y- and Dobot Magician will move along Y-axis in the negative or positive …
-
Page 27
3 Introduction Dobot Magician User Guide MOVJ: Joint movement. From point A to point B, each joint will run from initial angle to its target angle, regardless of the trajectory, as shown in Figure 3.6. Figure 3.6 MOVL/MOVJ mode MOVL: Rectilinear movement. -
Page 28: Technical Specifications
3 Introduction Dobot Magician User Guide Figure 3.8 ARC mode 3.3.3.4 Application Scenarios The application scenario depends on the trajectory in motion mode, as shown in Table 3.1. Table 3.1 Application scenario Motion mode Application scenario MOVL If the trajectory of playback is required as a straight…
-
Page 29: Sizes
20 extensible I/O interfaces Software DobotStudio Working -10° to 60° temperature Sizes Figure 3.9 shows the size of Dobot Magician and Figure 3.10 shows the size of the end mounting hole. Issue V1.0 (2018-09-11) User Guide Copyright © Yuejiang Technology Co., Ltd.
-
Page 30
3 Introduction Dobot Magician User Guide Figure 3.9 Size of Dobot Magician Figure 3.10 Size of end mounting hole Issue V1.0 (2018-09-11) User Guide Copyright © Yuejiang Technology Co., Ltd. -
Page 31: Interface Description
Dobot Magician User Guide Interface Description Interface Board The interfaces of Dobot Magician are located on the back of the base and the Forearm respectively. Figure 4.1 shows the interfaces on the back of the base, and Table 4.1 lists the description.
-
Page 32
4 Interface Description Dobot Magician User Guide Table 4.2 Peripheral interface description Interface Description Power interface of air pump; output 12V of controllable power Output 12V of controllable power Stepper1 User-defined stepper interface; extruder interface (3D printing mode) Stepper2 User-defined stepper interface Signal interface of air pump;… -
Page 33: Led Indicator
Connection of 3D printing kit is abnormal Multiplexed I/O Interface Description The addresses of the I/O interfaces in Dobot Magician are unified. Most of I/O interfaces have multiple functions, to control the peripheral equipment. Multiplexed Base I/O Interface Description 4.3.1.1 Multiplexed UART Interface Description…
-
Page 34
4 Interface Description Dobot Magician User Guide Table 4.5 Multiplex I/O Description I/O addressing Voltage Level Output Level Input 3.3V √ √ 3.3V √ √ 3.3V √ √ 4.3.1.2 Multiplexed Peripheral Interface Description Figure 4.4 shows the peripheral interface on the base, and Table 4.6 lists the multiplexed I/O description. -
Page 35: Multiplexed Forearm I/O Interface Description
4 Interface Description Dobot Magician User Guide Multiplexed Forearm I/O Interface Description Figure 4.5 shows the peripheral interface on the Forearm, Table 4.7 lists the multiplexed I/O description. Figure 4.5 Peripheral interface in the Forearm Table 4.7 Multiplexed I/O description…
-
Page 36: Operation
Introduction to the DobotStudio Function Modules You can use the DobotStudio to control the Dobot Magician to accomplish multiple functions such as Teaching & Playback, Write & Draw, Blockly graphic programming, and Script control, as shown in Figure 5.1. For details, see Table 5.1.
-
Page 37
Add More Add more custom functions to manipulate the robotic arm. You can also set the Dobot Magician by clicking Setting on the DobotStudio page, for example, implement general settings, base calibration, manual levelling, and auto levelling, as shown in Figure 5.2. -
Page 38: Common Areas Of Dobotstudio Page
5 Operation Dobot Magician User Guide Items Description Set the jogging speed and acceleration in the Joint coordinate system and Cartesian coordinate system Playback Set the joint parameters, coordinate parameters, Jump parameters, handhold teaching and LostStepParam. Write Draw Set the Write & Draw function, such as speed, Junction velocity, linear acceleration, acceleration, pen up offset and pen down position.
-
Page 39
Figure 5.5 Setting the Operation Panel Table 5.5 Setting the Operation Panel Items Description Coordinate Jog the Dobot Magician by clicking X (X+/-), Y (Y+/-), Z (Z+/-), or R (R+/-) in the jogging Cartesian coordinate system Issue V1.0 (2018-09-11) User Guide… -
Page 40: Performing Teaching & Playback Tasks
Because a suction cup kit or a gripper kit is required, we will explain them first. Installing a Suction Cup Kit A suction cup kit is the default end-effector shipped with the Dobot Magician. When using the suction cup kit, an air pump is necessary, as shown in Figure 5.6.
-
Page 41
5 Operation Dobot Magician User Guide Figure 5.7 Connect the air pump to the Dobot Magician Insert a suction cup kit into the end’s port, and fasten it with a butterfly nut, as shown in Figure 5.8. Figure 5.8 Install a suction cup kit Connect the air pump’s air tube to the air tube connector of the suction cup kit, as… -
Page 42
5 Operation Dobot Magician User Guide Figure 5.9 Install an air tube Connect the servo’s GP3 cable to the GP3 connector on the Forearm, as shown in Figure 5.10. Issue V1.0 (2018-09-11) User Guide Copyright © Yuejiang Technology Co., Ltd. -
Page 43: Installing A Gripper Kit
5 Operation Dobot Magician User Guide Figure 5.10 Connect the servo’s GP3 cable to the GP3 connector Installing a Gripper Kit An air pump should be used with the gripper kit, as shown in Figure 5.11, to open or close the gripper.
-
Page 44
5.13. Figure 5.13 Install a gripper kit Connect the gripper kit and an air pump to the Dobot Magician in the same way as the suction cup kit is installed. For details, see 5.2.1 Installing a Suction Cup Kit. Figure 5.14 shows the effect of the gripper kit installation. -
Page 45: Teaching & Playback Page
5 Operation Dobot Magician User Guide Figure 5.14 The effect of the gripper kit installation Teaching & Playback Page The Teaching & Playback page is shown in Figure 5.15. To access it, select Connect > Teaching & Playback on the DobotStudio page.
-
Page 46
5 Operation Dobot Magician User Guide Table 5.6 Set Easy/Pro, Loop, Speed and acceleration (Acc) Items Description Click this slider to switch between Easy and Pro modes. The default is the Easy mode. Easy/Pro Apart from all the functions in the Easy mode, the Pro mode offers multiple features such as the offline mode and multiplexed I/O interface. -
Page 47
5 Operation Dobot Magician User Guide Items Description Pause time Set the pause time for a save point In both Easy and Pro modes, you can edit a highlighted save point such as copy, paste, cut, switch between motion modes, modify name and coordinates, as shown in Figure 5.18. -
Page 48: Arc Motion Mode
If Check Lost Step is selected, the robotic arm detects if the stepper motors lose steps when moving. If unselected, no detection is performed If the Dobot Magician detects lost-steps, it stops working, and its LED indicator turns red. In this case, click Home to get a correct reference position…
-
Page 49
The three points cannot be in the same straight line. The arc trajectory cannot exceed the Dobot Magician’s normal workspace. For example the points A, B, and C are on the arc. Point A is the start point; Point B is the second point;… -
Page 50
Dobot Magician User Guide Set the jogging speed percentage to 50 on the Operation Panel. Jog the Dobot Magician in the Cartesian or Joint coordinate system to move the robotic arm to a location called position A. Click +Point to save the coordinate corresponding to the position A, as shown in Figure 5.22. -
Page 51: Teaching & Playback Example
Teaching & Playback Example Application Scenarios You can use Teaching & Playback function module to manipulate the Dobot Magician to accomplish different tasks such as transportation or intelligent sort. This topic introduces how to move small cubes from position A to B in the JUMP motion mode.
-
Page 52
5 Operation Dobot Magician User Guide A suction cup kit has been installed. For details, see 5.2.1 Installing a Suction Cup Kit. Procedure Choose SuctionCup as the end-effector on the DobotStudio page, as shown in Figure 5.25. Figure 5.25 Choose SuctionCup as the end-effector Click Teaching &… -
Page 53
5 Operation Dobot Magician User Guide Figure 5.26 Display the Operation Panel Set the jogging speed percentage to 50 on the Operation Panel. NOTE To change the jogging speed, select Setting > Jog to set the speed and acceleration of the joints, linear rail, or the Cartesian coordinate system, as shown in Figure 5.27. -
Page 54
Cartesian coordinate system, we recommend that it should be less than 500mm/s if loaded and that less than 800mm/s if not loaded. Jog the Dobot Magician in the Cartesian or Joint coordinate system to move the suction cup close enough to the small cube for picking-up. For example, the suction cup reaches this location called position A. -
Page 55
Dobot Magician User Guide Figure 5.29 Jump parameters Jogging the Dobot Magician in the Cartesian or Joint coordinate system to move the small cube to the end position B as required. Unselect SucktionCup to turn off the air pump to release the small cube. -
Page 56
Set the lost-step checking threshold Set Loop to 2. Place the small object back to the position A, and click Start. The Dobot Magician performs the sequence of JUMP trajectory as taught from its memory system, moving the small cube from positions A through B. -
Page 57: Working In Offline Mode
Figure 5.32 Move the small cube in the JUMP motion mode Working in Offline Mode Offline mode allows the Dobot Magician to perform the points in the Save points list previously downloaded from the DobotStudio without keeping the USB connection established.
-
Page 58
Figure 5.34. Figure 5.34 The process bar at the bottom of the DobotStudio page Disconnect the DobotStudio from the Dobot Magician or the USB cable between the robotic arm and your computer. -
Page 59: Writing And Drawing
A writing kit consists of a pen and a pen holder. For detailed steps, see below. Install a pen in the pen holder. Fasten the writing kit to the Dobot Magician’s end with a butterfly nut, as shown in Figure 5.36.
-
Page 60: Connecting The Dobotstudio
Launch the DobotStudio, and select the COM port, and then click Connect. If the current firmware of the Dobot Magician is the 3D Printing firmware instead of the Dobot firmware, the Select tool dialog box is displayed, asking if you want to switch to the Dobot firmware.
-
Page 61
Dobot Magician User Guide Figure 5.39 Confirm the firmware upgrade Click Confirm to upgrade the Dobot firmware, as shown in Figure 5.40. When the upgrade process bar shows 100%, and a short beep sound is heard, it means that the firmware is upgraded successfully, as shown in Figure 5.41. In this case, the LED indicator turns from red to green. -
Page 62: Importing Image Files And Setting Writing Parameters
Dobot Magician User Guide WARNING During the firmware upgrade, do not stop it. Otherwise, errors occur. Click Connect on the DobotStudio page to connect the DobotStudio to the Dobot Magician. Click Write & Draw, as shown in Figure 5.42. Figure 5.42 Click Write & Draw Choose Pen as the end-effector on the Write &…
-
Page 63
5 Operation Dobot Magician User Guide Prerequisites A PLT or SVG image file has been created. Procedure Click Write & Draw on the DobotStudio page, as shown in Figure 5.44. Figure 5.44 Click Write & Draw Import an image file using one of the following methods. -
Page 64
5 Operation Dobot Magician User Guide Figure 5.46 The PLT or SVG image is located outside the annular area Click Open on the Write & Draw page to import a built-in PLT or SVG image file from DobotStudio installation… -
Page 65
5 Operation Dobot Magician User Guide Figure 5.48 Insert a system image file Click Input Texts on the Write & Draw page to input texts, and set its style, and then click OK to display the text on the annular area, as shown in Figure 5.49. -
Page 66
5 Operation Dobot Magician User Guide to display the converted SVG file on the annular area of the Write & Draw page. Figure 5.50 Import an image Figure 5.51 Convert an image to SVG Set the writing parameters. Click Setting on the Write & Draw page, as shown in Figure 5.52. -
Page 67
5 Operation Dobot Magician User Guide Figure 5.52 Click Setting Click Write & Draw to set the Dobot Magician’s Velocity (mm/s), junction velocity (JunctionVel: mm/s), PlanAcc (mm/s ), acceleration (Acc: mm/s PenUpOffset (mm), PenDown (mm), as shown in Figure 5.53. -
Page 68: Adjust The Position Of The Pen Nib
Raise and lower the position of the pen nib. Press and hold the unlock button on the Forearm to move the Dobot Magician to raise and lower the pen nib until it slightly squeezes the paper. You can also jog the robotic arm in the Cartesian or Joint coordinate system to slowly pull the Z axis down to a suitable vertical position for writing, as shown in Figure 5.54.
-
Page 69
NOTE The point marked by a red box, as shown in Figure 5.55, corresponds to the position of the writing kit of the Dobot Magician. This point changes its position only within the annular area when the robotic arm moves. -
Page 70: Performing Laser Engraving Tasks
PenDown. Figure 5.57 The PenDown parameter Click SyncPos. The Dobot Magician automatically moves above the position (PenDown) of the start point of the text. Click Start to start writing on the paper. When writing, click Pause to pause the writing and Stop to halt the writing.
-
Page 71: Installing A Laser Kit
Engraving a Grayscale Image. Installing a Laser Kit Procedure A laser kit includes a laser. For detailed steps, see below. Fasten the laser kit to the Dobot Magician’s end with a butterfly nut, as shown in Figure 5.59. Issue V1.0 (2018-09-11) User Guide…
-
Page 72
5 Operation Dobot Magician User Guide Figure 5.59 Fasten the laser with a butterfly nut Connect the laser’s power cable to the SW4 connector on the Forearm and the TTL control cable to the GP5 connector, as shown in Figure 5.60. -
Page 73: Connecting The Dobotstudio
Launch the DobotStudio, and select the COM port, and then click Connect. If the current firmware of the Dobot Magician is the 3D Printing firmware instead of the Dobot firmware, the Select tool dialog box is displayed, asking if you want to switch to the Dobot firmware.
-
Page 74
Figure 5.64 The firmware upgrade is successful WARNING During the firmware upgrade, do not stop it. Otherwise, errors occur. Click Connect on the DobotStudio page to connect the DobotStudio to the Dobot Magician. Click Write & Draw module function, as shown in Figure 5.65. -
Page 75: Importing Image Files And Setting Engraving Parameters
5 Operation Dobot Magician User Guide Figure 5.65 Click Write & Draw Choose Laser as the end-effector, as shown in Figure 5.66. Figure 5.66 Choose Laser as the end-effector Importing Image Files and Setting Engraving Parameters When performing a laser-engraving task, a built-in or a custom image file is required. Only a PLT or SVG image can be used.
-
Page 76
5 Operation Dobot Magician User Guide Figure 5.67 Click Write & Draw Import an image file using one of the following methods. NOTICE The imported image should be placed within the annular area on the Write & Draw page, as shown in Figure 5.68. If not, the robotic arm reaches its limited position and thus cannot engrave on an object. -
Page 77
5 Operation Dobot Magician User Guide Figure 5.69 The PLT or SVG image is located outside the annular area Click Open on the Write & Draw page to import a built-in PLT or SVG image file from DobotStudio installation… -
Page 78
5 Operation Dobot Magician User Guide Figure 5.71 Insert a system image file Click Input Texts on the Write & Draw page to input texts, and set its style, and then click OK to display the text on the annular area, as shown in Figure 5.72. -
Page 79
5 Operation Dobot Magician User Guide to display the converted SVG file on the annular area of the Write & Draw page. Figure 5.73 Import an image file Figure 5.74 Convert Bitmap to SVG Set the laser-engraving’s parameters. Click Setting on the Write & Draw page, as shown in Figure 5.75. -
Page 80
5 Operation Dobot Magician User Guide Figure 5.75 Click Setting Click Write & Draw to set the Dobot Magician’s Velocity (mm/s), junction velocity (JunctionVel: mm/s), PlanAcc (mm/s ), acceleration (Acc: mm/s PenUpOffset (mm), PenDown (mm), as shown in Figure 5.76. -
Page 81: Adjust The Laser Focus And Start To Grave
5 Operation Dobot Magician User Guide Figure 5.76 Setting the parameters of the Write & Draw function Adjust the Laser Focus and Start to Grave Procedure Choose Laser as the end-effector on the Write & Draw page, as shown in Figure 5.77.
-
Page 82
Never aim the laser at a person and their clothes. Do not allow the children to play with the Dobot Magician. Monitor the robotic arm while it is running and power off it once the movement is complete. -
Page 83
The point marked by a red box, as shown in Figure 5.81, corresponds to the position of the end-effector of the Dobot Magician. This point changes its position only within the annular area when the robotic arm moves. Issue V1.0 (2018-09-11) User Guide Copyright ©… -
Page 84
5 Operation Dobot Magician User Guide Figure 5.81 The point corresponding to the end-effector of the robotic arm Click AutoZ on the Write & Draw page to obtain and save the current value of Z axis. Once this step is complete, the next time you start to engrave, directly import a PLT or SVG image file without adjusting the position of the laser kit, and click SyncPos, and then click Start to start engraving on the paper, as shown in Figure 5.82. -
Page 85
Dobot Magician User Guide Figure 5.83 Set the PenDown parameters Click SyncPos. The Dobot Magician automatically moves above the position (PenUpOffset) of the start point of the laser-engraving. Click Start to start engraving on the paper. When engraving, click Pause to pause the engraving and Stop to halt the engraving. -
Page 86: Engraving A Grayscale Image
5 Operation Dobot Magician User Guide Figure 5.84 The effect of the laser-engraving Engraving a Grayscale Image Figure 5.85 shows the process of engraving a grayscale image. Figure 5.85 The process of engraving a grayscale image Installing a Grayscale-engraving Kit Issue V1.0 (2018-09-11)
-
Page 87: Connecting The Dobotstudio
Launch the DobotStudio, and select the COM port, and then click Connect. If the current firmware of the Dobot Magician is the 3D Printing firmware instead of the Dobot firmware, the Select tool dialog box is displayed, asking if you want to switch to the Dobot firmware.
-
Page 88
5 Operation Dobot Magician User Guide Figure 5.88 Click Confirm Figure 5.89 The firmware upgrade is successful WARNING During the firmware upgrade, do not stop it. Otherwise, errors occur. Click LaserEngraving, as shown in Figure 5.90. Issue V1.0 (2018-09-11) User Guide… -
Page 89: Importing Image Files And Setting Engraving Parameters
5 Operation Dobot Magician User Guide Figure 5.90 Click LaserEngraving Importing Image Files and Setting Engraving Parameters Prerequisites An image file has been created. Procedure NOTICE The imported image should be placed within the annular area on the LaserEngraving page, as shown in Figure 5.91. If not, the robotic arm reaches its limited position and thus cannot engrave on an object.
-
Page 90
5 Operation Dobot Magician User Guide Figure 5.91 The image file is located within the annular area Figure 5.92 The image file is located outside the annular area Choose Laser as the end-effector on the LaserEngraving page, as shown in Figure 5.93. -
Page 91
5 Operation Dobot Magician User Guide Figure 5.93 Choose Laser as the end-effector Click Open to import an image file such as BMP, JPEG, or PNG, as shown in Figure 5.94. Figure 5.94 Import an image file Set the Grayscale range, Laser power range, and Border, as shown in Figure 5.95. -
Page 92
5 Operation Dobot Magician User Guide Table 5.11 Laser engraving parameters Items Description Grayscale range Set the grayscale range Range: 0 — 255 Default value: 20 — 240 Laser power range Set the laser power range Range: 2 — 100… -
Page 93: Adjust The Laser Focus And Start To Engrave
Never aim the laser at a person and their clothes. Do not allow the children to play with the Dobot Magician. Monitor the robotic arm while it is running and power off it once the movement is complete.
-
Page 94
The point marked by a red box, as shown in Figure 5.100, corresponds to the position of the laser kit of the Dobot Magician. This point changes its position only within the annular area when the robotic arm moves. -
Page 95
5 Operation Dobot Magician User Guide Figure 5.100 The point corresponding to the laser kit of the robotic arm Click AutoZ on the LaserEngraving page to obtain and save the current value of the Z axis. Figure 5.101 Lock the height of engraving NOTE… -
Page 96
Dobot Magician User Guide Figure 5.102 Set the PenDown parameters Click SyncPos. The Dobot Magician automatically moves above the position of the start point of the laser-engraving. Click Start to start engraving on the paper. When engraving, click Pause to pause the engraving and Stop to halt the engraving. -
Page 97: Controlling With Your Hand Gesture
5 Operation Dobot Magician User Guide Figure 5.103 The effect of laser-engraving Controlling with your Hand Gesture You can use the LeapMotion function module of the DobotStudio to perform tasks, for example, grab or suck an object with your hand gesture.
-
Page 98: Leap Motion Demo
5 Operation Dobot Magician User Guide Procedure Connect a Leap Motion controller to your computer with a USB cable, and put it on the work surface with its face up, as shown in Figure 5.105. Figure 5.105 Connect the Leap Motion controller to your computer Install the Leap Motion driver software by following the on-screen instructions, as shown in Figure 5.106.
-
Page 99
The suction cup kit has been installed. For details, see 5.2.1 Installing a Suction Cup Kit. Procedure Launch the DobotStudio, and click Connect to connect to the Dobot Magician. Click LeapMotion, as shown in Figure 5.107. Figure 5.107 Click LeapMotion Click Setting on the DobtStudio page, as shown in Figure 5.108. -
Page 100
Choose SuctionCup as the end-effector on the DobotStudio page, and click Start to control the Dobot Magician with your hand gesture, as shown in Figure 5.110. To maintain the Dobot Magician in a stable state, move your hand into the workspace of the Leap Motion controller while keeping your palm upward. -
Page 101: Controlling With Your Mouse
Unclench your fist Turn off the air pump Put a small cube on the work surface in the workspace of the Dobot Magician, such as point A, and use the hand gesture to move robotic arm above the cube until it’s close to the cube.
-
Page 102
5 Operation Dobot Magician User Guide Prerequisites The Dobot Magician is powered on and connected to your computer. The suction cup kit has been installed. For details, see 5.2.1 Installing a Suction Cup Kit. Procedure Figure 5.111 Click Mouse Figure 5.112 Choose SuctionCup as the end-effector… -
Page 103
5 Operation Dobot Magician User Guide Figure 5.113 Click Setting Click Mouse, as shown in Figure 5.114. Set the parameters, as shown in Table 5.14, and click OK. Figure 5.114 Set the parameters of mouse control Issue V1.0 (2018-09-11) User Guide… -
Page 104
5 Operation Dobot Magician User Guide Table 5.14 Set the parameters of mouse control Parameters Description Speed The velocity percentage of the Dobot Magician: Unit: % Value range: 1 — 100 Default value: 50 Scale The scale of the Dobot Magician:… -
Page 105: Operating 3D Printing
5 Operation Dobot Magician User Guide NOTE For details on how to use the mouse to control the robotic arm on the Mouse page, see Table 5.15. Table 5.15 The robotic arm’s movement created with your mouse Mouse action Robotic arm’s movement…
-
Page 106: Installing 3D Printing Kit
5 Operation Dobot Magician User Guide Figure 5.116 3D printing process During 3D printing, the 3D printing control software is required. You can use Repetier Host or Cura software for 3D printing. Reptier-Host: Reptier-Host can slice with the third party slicing (such as CuraEngine, …
-
Page 107
5 Operation Dobot Magician User Guide Figure 5.117 3D printing kit Procedure Press down the lever on the extruder, and push down the filament to the bottom of the hole via the pulley, as shown in Figure 5.118. Issue V1.0 (2018-09-11) User Guide Copyright ©… -
Page 108
5 Operation Dobot Magician User Guide Figure 5.118 Push down the filament Connect the end of the PTFE tube to the hot end and push it down to the bottom of the hot end, and connect the other end to the extruder, as shown in Figure 5.119 Connect extruder and hot end… -
Page 109
Please make sure that the PTFE tube has been pushed down to the bottom of the hot end. Otherwise, it will cause abnormal discharge. Fix the hot end on the Dobot Magician with butterfly nut, as shown in Figure 5.120. Figure 5.120 Fix hot end Insert the heating cable to the interface 4 on the Forearm, the fan cable to the interface 5 and the thermistor cable to the interface 6, as shown in Figure 5.121. -
Page 110
5 Operation Dobot Magician User Guide Figure 5.121 Connect hot end to the Forearm Connect the extruder to the Stepper1 interface on the back of the base with motor cable, as shown in Figure 5.122. Figure 5.122 Connect with extruder Issue V1.0 (2018-09-11) -
Page 111: Operating Repetier Host
Repetier Host page will be displayed automatically. Prerequisites The 3D printing model has been prepared. The printing platform has been prepared and please place it in the workspace of the Dobot Magician. Dobot Magician has been powered on.
-
Page 112
If the LED indicator on the base turns red, it indicates that the connection of the 3D printing kit is abnormal. WARNING Please DO NOT operate or turn off Dobot Magician when burning firmware, to avoid machine damage. Figure 5.125 Repetier Host page Issue V1.0 (2018-09-11) -
Page 113
5 Operation Dobot Magician User Guide NOTICE If the current firmware is set for 3D printing when operating 3D printing, you can click Connect directly on the DobotStudio page. And then Click OK on the Select tool page to switch to Repetier Host, as shown in Figure 5.126. -
Page 114
5 Operation Dobot Magician User Guide Figure 5.127 Connection setting Click Apply. Unselect the corresponding options on the Printer tab as shown in the red box of Figure 5.128 and the other parameters are set by default. Then, click Apply. -
Page 115
5 Operation Dobot Magician User Guide Figure 5.128 Unselect options Set the corresponding parameters on the Extruder tab as shown in the red box of Figure 5.129, the other parameters are set by default. Then, Click Apply. Issue V1.0 (2018-09-11) User Guide Copyright ©… -
Page 116
5 Operation Dobot Magician User Guide Figure 5.129 Extruder settings Set the corresponding parameters on the Printer Shape tab as shown in the red box of Figure 5.130, the other parameters are set by default. Then, Click Apply. Issue V1.0 (2018-09-11) User Guide Copyright ©… -
Page 117
Figure 5.130 Printer shape settings Click OK Click Connect on the Repetier Host page to connect Dobot Magician. After the connection is successful, the current heating temperature will be shown on the below of the Repetier Host page, as shown in Figure 5.131. -
Page 118
Before printing, you need to test the extruder to check whether the melted filament flows from the nozzle of the extruder. The temperature of the extruder should be above 170℃. Dobot Magician will not start 3D printing until the filament is in the melting state. So you need to heat the extruder first. -
Page 119
Adjust the printing space and get the printing coordinates. NOTE During printing, if the distance from Dobot Magician to the printing platform is too large or too small to paste the first layer, it can lead to the nozzle blockage. For increasing the stickiness of the first layer, placing a masking paper on the platform is recommended. -
Page 120
5 Operation Dobot Magician User Guide coordinates. Figure 5.134 Input M415 NOTE If you cannot find the G-Code command window, please click EASY to close Easy Mode, as shown in Figure 5.135. Figure 5.135 Easy mode Click Load to import the prepared 3D printing model, as shown in Figure 5.136. -
Page 121
5 Operation Dobot Magician User Guide Figure 5.136 Import 3D printing Model After importing the model, you can center, zoom, or rotate the model on the Object Placement page, as shown in Figure 5.137. Figure 5.137 Model operation Set slicing parameters and slice up. -
Page 122
5 Operation Dobot Magician User Guide Select Slic3r from Slicer on the Slicer tab of the Repetier Host page, and click Configuration, as shown in Figure 5.138. Figure 5.138 Select slicer The Slic3r page is displayed, as shown in Figure 5.139. -
Page 123
Figure 5.140. Figure 5.140 Configuration sample Dobot-2.0-Vase.ini is used for printing a thin-walled vase, while Dobot-2.0-ini is used for the filling, the filling rate is 20%. Save the Printing Settings, Filament Settings and Printer Settings tabs respectively after importing configuration sample, as shown in Figure 5.141. -
Page 124
5 Operation Dobot Magician User Guide Click Slici with Slic3r on the Slicer tab of the Repetier Host page, as shown in Figure 5.142. Figure 5.142 Start to slice Click on the top left corner of the Repetier Host page to print. -
Page 125: Operating Cura
Please download the recommended version V14.07. The way how to install and use is not descripted in this topic. The 3D printing model has been prepared. The printing platform has been prepared and please place it in the workspace of Dobot Magician. Dobot Magician has been powered on.
-
Page 126
After burning 3D printing firmware, if the LED indicator on the base turns red, it indicates that the connection of the 3D printing kit is abnormal. WARNING Please DO NOT operate or turn off Dobot Magician when burning firmware, to avoid machine damage. 5.9.3.2 Performing 3D Printing Procedure Launch Cura software. -
Page 127
5 Operation Dobot Magician User Guide Figure 5.146 Parameters setting Table 5.16 3D printing parameters description Parameter Description Maximum width The maximum width please set to 80mm Maximum depth The maximum with please set to 80mm Maximum height The maximum height… -
Page 128
attachment, as shown in Figure 5.148. Figure 5.148 Configuration sample Dobot-2.0-Vase-Cura.ini is used for printing a thin-walled vase, while Dobot- 2.0-Cura.ini is used for the filling, the filling rate is 20%. , the Open 3D model page is displayed, and select the 3D Click Issue V1.0 (2018-09-11) -
Page 129
Set Temperature to 200 and press down Enter to heat the extruder. The temperature of the extruder should be above 170℃. Dobot Maigicain will not start 3D printing until the filament is in the melting state. So you need to Issue V1.0 (2018-09-11) -
Page 130
Adjust the printing space and get printing coordinates. NOTE During printing, if the distance from Dobot Magician to the printing platform is too large or too small to paste the first layer, it can lead to the nozzle blockage. For increasing the stickiness of the first layer, placing a masking paper on the platform is recommende. -
Page 131: Calibration
5 Operation Dobot Magician User Guide Press the Unlock key on the Forearm and drag Dobot Magician to make the printing head contact the surface of the masking paper(The distance between the printing head and the surface of the masking paper is the thickness of a sheet of A4 paper), then release the Unlock key.
-
Page 132
Click Teaching&Playback on the DobotStudio page. The Teaching&Playback page is displayed. Press the Unlock key on the Forearm and drag Dobot Magician to make the nib contact the surface of the calibration board, then release the Unlock key. The coordinates of this point will be displayed on the Teaching&Playback page. -
Page 133
Click Setting > Base Calibration on the DobotStudio page. Click Next on the Base Calibration page. Dobot will start homing. Please ensure that there are no obstacles in the workspace during homing. Click +J1 or -J1 to make the nib at a point on the line between A3 and B3 on the calibration board, as shown in Figure 5.155 and Figure 5.156. -
Page 134: Sensor Calibration
The angle sensors of the Forearm and Rear Arm have been calibrated before being shipped out. Generally, the Z-coordinate will remain the same when moving Dobot Magician in the same horizontal plane. If changed, you need to recalibrate the angle sensors by manual levelling or auto levelling to improve the positioning accuracy.
-
Page 135
The sensor calibration board has been prepared. Procedure Place the Dobot Magician at the right position on the sensor calibration board, as shown in Figure 5.158. Figure 5.158 Location of Dobot Magician Click Setting > Manual Levelling on the DobotStudio page. -
Page 136
Click Next and set Angle Precision, Distance Precision, Result Range. Figure 5.160 Set precisions Click Next and follow the instructions on the Manual Levelling page to move Dobot Magician to the first calibrated point. If the calibrated point is A3 on the Calibration board. -
Page 137
Install the writing kit. For details, please see 5.4.1 Installing a Writing Kit. Press the Unlock key on the Forearm and drag Dobot Magician to make the nib near the A3 point on the calibration board, then release the Unlock key. -
Page 138
Click Next and follow the instructions on the Manual Levelling page (as shown in Figure 5.163) to move Dobot Magician to make the nib in the center of the second calibrated point. If the calibrated point is B3 on the calibration board, as shown in Figure 5.164. -
Page 139
5 Operation Dobot Magician User Guide Figure 5.163 Fine-tune page Figure 5.164 Nib position on the second calibrated point Click Next and set the distance between the two calibrated points, as shown in Figure 5.165. The distance between the two calibrated points on the Calibration board is 80mm, so please keep the default value in this step. -
Page 140
5 Operation Dobot Magician User Guide Figure 5.165 Set the distance between the two calibrated points Click Next to start calibrating. The result is shown as Figure 5.166. Figure 5.166 Calibrating result Issue V1.0 (2018-09-11) User Guide Copyright © Yuejiang Technology Co., Ltd. -
Page 141
Place Dobot Magician on the flat platform. NOTICE Please ensure that the platform is flat. Or, the auto levelling will be failed. Fix the auto-levelling tool on the Dobot Magician with butterfly nut, as shown in Figure 5.168. Issue V1.0 (2018-09-11) User Guide Copyright ©… -
Page 142
5 Operation Dobot Magician User Guide Figure 5.168 Fix auto-levelling tool Insert the cable of the auto-levelling tool to the interface 1 on the Forearm, as shown in Figure 5.169. Figure 5.169 Insert the cable of the auto-levelling Issue V1.0 (2018-09-11) User Guide Copyright ©… -
Page 143
5 Operation Dobot Magician User Guide Power on Dobot Magician and connect it to DobotStudio. Click Setting > Auto Levelling on the DobotStudio page. NOTICE Please ensure that there are no obstacles in the workspace during auto levelling. Figure 5.170 Auto levelling page Click Start on the Auto Levelling page. -
Page 144: Homing
Figure 5.171 Auto levelling result Homing Dobot Magician has been calibrated before being shipped out. If the Dobot Magician has been hit or the motor has lost step, leading data abnormal, you need to operate homing to improve the positioning accuracy.
-
Page 145: Connecting With Wifi Kit
Figure 5.173 Set homing point Connecting with WIFI Kit You can connect Dobot Magician to a PC via WIFI kit without USB cable, making Dobot Magician and PC in the same WLAN. Figure 5.174 shows the WIFI kit. Figure 5.174 WIFI kit Prerequisites Issue V1.0 (2018-09-11)
-
Page 146
Figure 5.175 Connect with WIFI kit NOTICE Please turn off the Dobot Magician completely first before connecting or disconnecting external equipment. Or, it causes serious damage to your device Press down the power button to turn on the Dobot Magician. -
Page 147
Yes: Only set SSID and Password No: Only set IPAddress, Netmask and Gateway IPAddress Set the IP address of Dobot Magician. The IP address of Dobot Magician and the PC must be in the same WLAN without conflict. Netmask Set subnet mask… -
Page 148
Click OK. About 5 seconds later, the green LED indicator on the WIFI module is on, indicating that the Dobot Magician has been connected with WLAN, as shown in Figure 5.177. Figure 5.177 Status of LED indicator Click Disconnect on the left pane of the DobotStudio page. -
Page 149: Connecting With Bluetooth Kit
5 Operation Dobot Magician User Guide Connecting with Bluetooth Kit Dobot Magician can be connected to smart phone with Bluetooth. Figure 5.179 shows the Bluetooth kit. Please download the matched DobotStudio APP from the website https://www.dobot.cc/downloadcenter.html?sub_cat=69#sub-download. Figure 5.179 Bluetooth kit Prerequisites Dobot Magician has been connected to the power adapter.
-
Page 150: Operating Blockly
Figure 5.180 Connect with Bluetooth kit NOTICE Please turn off the Dobot Magician completely first before connecting or disconnecting external equipment. Or, it causes serious damage to your device. Press down the power button to turn on the Dobot Magician.
-
Page 151
5 Operation Dobot Magician User Guide Dobot Magician has been powered on. Dobot Magician has been connected to DobotStudio successfully. Procedure Click Blockly on the DobotStudio page. The Blockly page is displayed. Drag the blockly module on the left pane of the Blockly page to program, as shown in Figure 5.181. -
Page 152: Scripting
Dobot Magician User Guide the programing file is Installation directory/DobotStudio/config/bystore. Please replace the path based on site requirements. Click Start on the Blockly page, and Dobot Magician will move according to the program. Scripting You can control Dobot Magician over scripting. Dobot Magician supports various API, such as velocity/acceleration setting, motion mode setting, and I/O configuration, which uses Python language for secondary development.
-
Page 153: Operating Stick Controller Kit
The running log will be displayed on the lower pane of the Script page for checking. Operating Stick Controller Kit Dobot Magician can be controlled by stick controller kit without DobotStudio. Figure 5.183 shows the stick controller kit. From left to right: Stick controller, USB Host module, USB cable (used for charging stick controller), Transceiver.
-
Page 154
Press down the power button to turn on the Dobot Magician. NOTICE Please turn off the Dobot Magician completely first before connecting or disconnecting external equipment. Or, it causes serious damage to your device. Press down the power button on the stick controller, as shown in Figure 5.185. -
Page 155
Turn off the air pump Left stick: Front/back Cartesian coordinate system mode: Dobot along X-axis in the Magician moves positive/negative direction Joint coordinate system mode: Dobot Magician along J1-axis rotates positive/negative direction Left stick: Left/right Cartesian coordinate system mode: Dobot … -
Page 156: Operating Sliding Rail
Operating Sliding Rail When the workspace of Dobot Magician is not enough, you can extend it with the sliding kit to do large-scale tasks, such as long-distance picking and placing, a large range of writing and so on. Figure 5.186 shows the sliding rail kit and Table 5.20 lists its description.
-
Page 157: Installing Sliding Rail
Sliding rail (with wire set and plate b) Installing sliding rail Procedure Mount Dobot Magician on the plate a with four M3*10 countersunk head cap screws (The counter bore of plate a is outwards), as shown in Figure 5.187. Issue V1.0 (2018-09-11) User Guide Copyright ©…
-
Page 158
Dobot Magician User Guide Figure 5.187 Fix plate a Fix the plate a (with Dobot Magician) on the plate b with three M3*8 hexagon socket head cap screws. Please make the back of the base of Dobot Magician towards the rabbet on the plate b, as shown in Figure 5.188. -
Page 159
5 Operation Dobot Magician User Guide Figure 5.188 Fixed position with screws Connect the end of the wire set to the plate b with a M3*6 countersunk head hexagon screw, as shown in Figure 5.189. Figure 5.189 Connect with wire set (Optional) Fix plate c. -
Page 160
Dobot Magician. For details, please see 5.2.1 Installing a Suction Cup Kit. Figure 5.191 Fix air pump Connect the interfaces on the end of the wire set to Dobot Magician, as shown in Figure 5.192. Issue V1.0 (2018-09-11) User Guide Copyright ©… -
Page 161
5 Operation Dobot Magician User Guide Figure 5.192 Connect to Dobot Magician Connect the interfaces on the other end of the wire set to the power adaptor, USB interface of PC, motor interface and homing interface of the sliding rail respectively. -
Page 162: Sliding Rail Parameter Description
0.25mm Demo Description This topic describes how to use sliding rail for writing. Prerequisites The sliding rail has been installed and connected to the Dobot Magician. Dobot Magician has been powered on. Dobot Magician has been connected to DobotStudio successfully.
-
Page 163
Procedure Click LineraRail on the DobotStudio page. Now, you can click L+, L- to make Dobot Magician move to the left or right. Click Home on the DobotStudio page. The sliding block moves to its homing point and then Dobot Magician rotates back to its homing point. -
Page 164
Dobot Magician User Guide Figure 5.196 Write&Draw page The rectangle in Figure 5.196 is the workspace of Dobot Magician (with sliding rail). Input text on the Iput Texts pane and click OK, as shown in Figure 5.197. If the text is Magician. -
Page 165: Multiplexed I/O Demo
Then, Dobot Magician continues to write. Multiplexed I/O Demo The addresses of the I/O interfaces in Dobot Magician are unified. Most of I/O interfaces have multiple functions. For details, please see 4.3 Multiplexed I/O Interface Description.
-
Page 166: Level Output
5 Operation Dobot Magician User Guide Figure 5.200 I/O setting page Now, demos of level output, level input, and PWM output are given below. Level Output Normally, air pump can be controlled by the I/O interfaces. The I/O 11 controls its intake (High level) and outtake (Low level) and the I/O 16 controls its start-stop.
-
Page 167
5 Operation Dobot Magician User Guide Figure 5.201 Peripheral Interface on the base Prerequisites The air pump has been connected to Dobot Magician. For details, please see 5.2.1 Installing a Suction Cup Kit. Dobot Magician has been powered on. -
Page 168
5 Operation Dobot Magician User Guide this topic, we use I/O interfaces to control the air pump, so SuctionCup and Gripper cannot be selected, to avoid conflict. Click icon on the Teaching&Playback page, as shown in Figure 5.203. Figure 5.203 Switch advanced function Select IO_11, IO_16 and their corresponding Value on the Output pane, and click +Point. -
Page 169: Level Input
√ √ √ Prerequisites Dobot Magician has been powered on. Dobot Magician has been connected to DobotStudio successfully. The saved points list has been existed on the Teaching&Playback page. Procedure Click icon on the Teaching&Playback page, as shown in Figure 5.206.
-
Page 170: Pwm Output
√ √ Prerequisites Dobot Magician has been powered on. Dobot Magician has been connected to DobotStudio successfully. Procedure Click icon on the Teaching&Playback page, as shown in Figure 5.208. Select IO_11 on the Output pane, and click +Point, as shown in Figure 5.209.
-
Page 171
5 Operation Dobot Magician User Guide Figure 5.209 Saved point Double-click EIO11 cell and select … from the drop-down list. The EIO Setting page is displayed, as shown in Figure 5.210. Figure 5.210 EIO setting Set Frequency (Unit: KHZ; Value range: 10HZ-1MHZ) and DutyRatio (0%-100%) on the EIO Setting page.
Время на прочтение
7 мин
Количество просмотров 12K
Здравствуйте! Сегодня мы рассказываем о небольшом настольном многофункциональном роботе манипуляторе DoBot Magician, предназначенном для образования — знакомства с робототехникой, ЧПУ и аддитивными технологиями, основами программирования.
Видео
Небольшой видеообзор даст первое представление об этой роборуке. Подробнее — далее в статье.
DoBot Magician
Характеристики
- Осей: 4
- Загрузка: 500г
- Дальность действия манипулятора: 320мм
- Точность: 0,2 мм
- Соединение: USB / Wi-Fi / Bluetooth
- Питание от сети: 100-240В, 50/60 Гц
- Выход блока питания: 12В/7A
- Потребление максимальное, Ватт: 60
- Рабочие температуры, °C: -10 — +60
- Вес робота без насадок, кг: 3,4
- Вес стандартного набора в упаковке, кг: 7,2
- Вес образовательного набора в упак., кг: 8
- Диаметр подставки: 158мм
- Материалы: Алюминиевый сплав 6061, ABS
- Форм-фактор: Настольный
- 3D-принтер: принт макс., мм: 150 × 150 × 150; материал печати: PLA; разрешение: 0,1мм
- Лазер: мощность: 0,5Вт; длина волны: 405нм; напряжение: 12В; TTL trigger ( With PWM Driver )
- Держатель пера: диаметр инструмента: 10мм
- Вакуумная присоска: диаметр: 20мм, давление -35 кПа
- Захват: пневматический, раскрытие до 27,5мм, сила: 8 Ньютонов
- Цена: 106 120 рублей
Уникальный миниробот имеет открытую аппаратно-программную платформу — он оснащен 13 портами ввода-вывода и может работать с двумя десятками языков программирования.
Благодаря комплекту насадок DOBOT Magician может перемещать объекты, выполнять гравировку лазером и 3D-печать, чертить и рисовать.
Распаковка
Робот приходит в такой коробке:
Внутри еще одна.
А в ней, в транспортировочной пене, коробочки поменьше.
Комплектация
DoBot Magician поставляется в двух вариантах комплектации: Базовый и Образовательный. У нас на обзоре Образовательный набор, базовый отличается от него лишь отсутствием модулей Bluetooth и Wi-Fi, джойстика, лазера и очков для работы с ним.
В комплект поставки образовательного робота манипулятора Dobot Magician входят: механический захват, вакуумная присоска, комплект для 3D-печати, лазер, держатель для ручки. Производитель постоянно расширяет ассортимент доступных насадок и аксессуаров, возможен предварительный заказ слайдера, миниатюрного конвейера и модуля компьютерного зрения. В ближайших планах DoBot — выпуск насадки для фрезерования.
Подробнее:
Сам манипулятор, который имеет слоты подключения периферии на втором сочленении и на задней стенке базы робота. Манипулятор приводится в движение тремя шаговыми двигателями, которые оснащены датчиками обратной связи и редукторами.
Серводвигатель, который выступает в роли четвертой оси робота. На нем можно закрепить вакуумный или механический захват.
Захваты приводятся в движение воздушной помпой.
В качестве рабочего инструмента можно установить лазерную головку. В комплекте, для защиты зрения пользователя, есть специальные очки.
Есть держатель пера, для написания текста или рисования, в него можно установить авторучку, лайнер или карандаш диаметром до 10мм.
Набор для 3D-печати: блок экструдера, подставка под катушку пластика, катушка PLA, тефлоновая трубка, стекло и малярный скотч. Скотч служит для закрепления стекла на столе.
Управлять манипулятором можно не только с компьютера, но и дистанционно, с помощью джойстика подключенного по Bluetooth. Кабель USB нужен для зарядки аккумулятора в джойстике.
Модули Bluetooth и Wi-Fi.
Устройство для автоматической калибровки, запасные винты и шестигранники.
Блок питания, кабель USB для соединения с ПК.
Краткая инструкция.
ПО
Для управления манипулятором надо установить драйвер и программу DoBot Studio, которые можно скачать с официального
сайта
.
Magician совместим со многими актуальными аппаратными и программными средствами, которые широко используются в робототехнике. Например, заявлена поддержка программной платформы ROS (Robot Operating System) и микроконтроллеров Arduino.
Так выглядит основной экран Dobot Studio.
В основном окне мы видим выбор режимов работы робота, справа располагается панель управления манипулятором, чуть выше находится меню настроек, кнопка экстренной остановки и кнопка «Home», а посередине окно выбора инструмента.
Софт DoBot Studio допускает управление несколькими роботами одновременно. По сути, прямо на столе можно создать имитацию сборочной линии, этому также способствует совокупность технических параметров, среди которых приемлемая повторяемость.
Управление
DoBot Magician гибок в управлении — программировать роборуку и управлять ею в режиме реального времени можно с помощью компьютера, смартфона или планшета. В качестве канала связи используется как Wi-Fi или Bluetooth, так и проводное USB-соединение. Робот может распознавать голосовые команды и жесты.
Режимы программирования
Основным режимом является «Обучение и повторение».
В этом режиме можно создавать управляющие программы, которые робот сможет выполнять единожды или циклично. Обучать робота можно двумя способами:
1.: На втором сочленении располагается кнопка, при нажатии на которую с двигателей снимается ток удержания и, благодаря этому, появляется возможность свободно перемещать манипулятор вручную. После перемещения инструмента и отпускания кнопки, координаты запишутся в таблицу.
2.: Переместить инструмент в нужное положение можно и с помощью панели управления, которая расположена в правой части экрана. Двигать можно как линейно, по осям, так и каждое сочленение поочередно. После перемещения, соответствующая координата сохраняется путем нажатия кнопки “+ Point”.
После записи всех координат и настройки способов движения, нажатием кнопки Play, мы запустим выполнение управляющей программы.
Управляющую программу можно загрузить в память манипулятора, чтобы он выполнял работу в режиме офлайн.
Для отладки существует кнопка Step Run, позволяющая запустить программу пошагово, чтобы убедиться в правильности движения.
Два следующих режима, «Блочное программирование» и «Скрипт», созданы для более глубокого изучения программирования и робототехники. В них возможно создание гораздо более сложных алгоритмов поведения, добавление условий выполнения различных сценариев.
Для начинающих, которые еще плохо знакомы с языками программирования, отлично подойдет режим Блочного программирования. Вместо запоминания сложных синтаксических форм и обозначений здесь используются блоки обозначающие условия, циклы, функции, математические преобразования. Тело программы выстраивается путем вставки одних блоков в другие.
Для продвинутых пользователей существует режим «Скрипты», где они смогут использовать весь потенциал этого робота, используя язык программирования Python.
Режимы работы
Для того, чтобы оценить максимально возможную область перемещения инструмента “живьем”, можно воспользоваться функцией управления манипулятором с помощью «мыши».
Следующий режим — «Рисование». В качестве инструмента на манипулятор, в специальный подпружиненный держатель, устанавливается ручка.
Можно создать надпись, вставить рисунок из встроенной библиотеки или добавить собственный.
Контуры воспроизводятся с высокой точностью.
Лазерный гравер. С помощью лазера можно выжигать или гравировать изображения.
Из настроек доступны «Диапазон оттенков серого», минимальная и максимальная мощность, в общих настройках можно отрегулировать скорость и ускорение.
Обработке поддаются многие материалы, такие как дерево, кожа, бумага, картон, акрил.
3D-печать. Для того, чтобы перейти к подготовке файла для печати, потребуется загрузка новой прошивки. При нажатии на кнопку “3D-печать” в главном меню, программа сама предложит изменить прошивку, вам просто нужно дождаться окончания загрузки и установки.
После этого откроется довольно привычное многим 3D-печатникам окно программы Repitier Host.
Здесь мы вбиваем параметры принтера, подгружаем профили печати и можно приступать к слайсингу.
Представленные ниже детали печатались на скорости всего 4 мм/с, поэтому печать заняла около 14 часов. Это стандартное значение скорости, взятое из родного профиля. Для облегчения веса экструдера, двигатель подачи пластика вынесен отдельно на платформу держателя катушки. Из-за этого приходится сокращать или вовсе убирать ретракты в настройках слайсера.
Вот так происходит печать.
К сожалению, из-за специфики строения аппарата, манипулятор имеет значительный люфт на инструменте. Это не мешает точному позиционированию при малых значениях ускорений и при использовании вакуумного или механического захвата. При использовании лазерного модуля и хотэнда, которые имеют немалый вес, этот люфт становится заметен.
Режим ручного управления. Управляя роботом с помощью джойстика, можно совершенствовать свои навыки в управлении подобным устройством и просто весело проводить время.
Если требуется более глубокое понимание принципов работы роботов манипуляторов и их сфер применения, то, с помощью второго DoBot,
конвейера
, инфракрасного и цветового датчика можно собрать небольшую производственную линию.
Для их синхронизации и запуска потребуется подключить оба робота к одному компьютеру и открыть два окна Dobot Studio, в которые загружаются исполняемые программы, которые скачиваются с сайта производителя, для каждого отдельного робота. Перед первым запуском систему нужно откалибровать, для этого в программе есть специальные переменные, которые можно изменять.
Правый манипулятор, по заданному алгоритму и с заданной периодичностью, выкладывает кубики на конвейерную ленту, а левый манипулятор регистрирует наличие кубика на ленте (с помощью инфракрасного датчика), определяет его цвет (с помощью цветового датчика) и помещает кубик в соответствующую стопку.
Назначение
Пример применения DoBot компанией Volkswagen.
DoBot Magician отлично подойдет для обучения детей. Учебный процесс с его участием может начинаться с простейшей игровой формы, благодаря наличию джойстика. Следующий шаг — основы программирования, сначала в блочном редакторе, а потом и скрипты.
Столь наглядное и интерактивное обучение намного эффективнее работы с “сухим” кодом, особенно в самом начале.
Учитывая интересы более продвинутых потенциальных пользователей, разработчики предусмотрели возможность подключения разнообразной периферии, которая не поставляется в комплекте. Это могут быть всевозможные датчики, сервоприводы и шаговые двигатели, светодиодные приборы и множество других электронных устройств, включая микрокомпьютеры и микроконтроллерные платформы, такие как Arduino. Учитывая это, можно рекомендовать DoBot Magician не только школам, но и техникумам, и вузам, как исключительно удачное наглядное пособие.
Уже сегодня этот миниробот используется как одно из основных средств STEM-обучения в ведущих китайских вузах — Университете Цинхуа и Шаньдунском политехе, а также в Австралии — в Сиднейском технологическом университете.
Выводы
Рассматривать качество работы DoBot Magician в сравнении с обычным 3D-принтером или лазерным гравером нельзя. Он никогда не даст качество 3D-печати сравнимое даже с бюджетными принтерами, но это естественно: это не принтер и не гравер, это совершенно другой аппарат, с иными задачами, которые он выполняет отлично.
Если вы работаете в сфере образования и ищете максимально эффективные средства обучения, обратитесь в
Top 3D Shop
— наши сотрудники подберут оптимальное для выполнения ваших задач оборудование.
Хотите больше интересных новостей из мира 3D-технологий?
Подписывайтесь на нас в соц. сетях:
Подписывайтесь на наш телеграм-канал с отборными кейсами роботизации и автоматизации со всего мира: https://tglink.ru/easy_robotics

В этой статье вы узнаете какое устройство поможет вам сделать свои первые шаги в такой интересной сфере как робототехника!
Дорогие друзья, сегодня в нашем обзоре необычное устройство, настоящая робо-рука, а точнее многофункциональный, роботизированный, настольный манипулятор — DOBOT Magician!
Содержание
- Общая информация
- Распаковка и сборка
- Первый взгляд
- Пример 3D печати
- Пример письма и рисования
- Примеры работы манипулятора
- Видео обзор
- Итог
- Где купить?
Общая информация
DOBOT Magician — это многофункциональный настольный роботизированный манипулятор, и предназначен он для практического обучения.

Прогресс неумолимо несется вперед, каждый день появляются новые автоматизированные устройства в самых разных сферах деятельности, и чтобы юные умы успевали осваивать все эти новые технологии, в учебный процесс по всему миру внедряются самые разные технические решения. Вы возможно уже слышали о 3д принтерах и других технологиях, с помощью которых обучают детей и молодых людей в самых разных учебных заведениях.
DOBOT Magician как раз нужен для этих целей. В 2018 году это устройство получило награды CES и Innovation Award, а также iF DESIGN AWARD, эта многогранная система является привлекательным дополнением к образовательной среде или экспериментальному пространству для энтузиастов в техно сфере.
DOBOT предлагает широкий спектр возможностей конечного инструмента, таких как 3D-печать, лазерная гравировка, письмо и рисование и многое другое. Кроме того, производитель разработал учебную программу для педагогов, чтобы максимально повысить образовательную ценность DOBOT Magician. Доступный в виде базовой модели и образовательной модели, этот роботизированный манипулятор идеально подходит для создателей или преподавателей, которые ищут инструмент для изготовления, который делает кучу интересных — манипуляций.
Подборка статей из раздела «База знаний» с сайта компании LIDER-3D: 1) Все, что вы хотели знать о 3D печати • 2) Роботизированный дирижабль на 3D принтере • 3) Гайд по SLS-порошкам для покупателя
Распаковка и сборка
Magician надежно упакован, все содержимое разложено по отдельным секциям. Схемы на небольших коробках помогают пользователю идентифицировать компоненты внутри, а прилагаемое руководство облегчает распаковку.

Вложенное в коробку руководство очень краткое — но его вполне хватает для первичной сборки и настройки, остальная часть руководства включена в дополнительный онлайн-документ.
Подключение питания было простым, а этикетки, прикрепленные к проводам, облегчали первоначальную настройку. Для калибровки мы установили рекомендованное программное обеспечение DobotStudio. Навигация в DobotStudio достаточно удобна и интуитивно понятна, она предлагает три различных режима калибровки: базовая калибровка, ручное выравнивание и автоматическое выравнивание. В нашем случае хорошо сработал метод автоматического выравнивания.
Как и было заявлено изначально, переключаться между различными доступными инструментами легко. Применение экструдера для 3D-печати также было интуитивно понятным, каждая головка/модуль крепится с помощью винта.
Первый взгляд
Назначение DOBOT Magician довольно простое: это многофункциональная четырех осевая роботизированная рука размером с настольный компьютер, предназначенная для практического обучения. Но DOBOT может не только перемещать разные вещи с места на место, устройство поставляется с различными насадками, позволяющими осуществлять 3D-печать, лазерную гравировку, письмо и рисование, а также захват и вакуумную откачку.
Будь то пайка печатных плат или работа с пером для 3D-печати, DOBOT Magician способен выполнять самые разнообразные задачи. Более того, он обеспечивает высокую повторяемость позиционирования до 0,2 мм.



Открытая роботизированная система совместима с 13 расширяемыми интерфейсами и 20 языками программирования, поэтому у пользователей есть множество способов контролировать и направлять роботизированную руку. Она включает визуализированный интерфейс программирования, использующий функции перетаскивания команд, чтобы облегчить процесс кодирования.
Студенты и создатели могут управлять роботизированным манипулятором с помощью программирования, APP, Bluetooth и WiFi. Помимо простых методов управления, производитель также предусмотрел возможность использования SDK последовательного порта и интерфейса управления движением для более продвинутых пользователей.
В настоящее время производитель предлагает две различные модели: базовую и образовательную. Как можно предположить, роботизированная система для образовательных учреждений содержит несколько дополнительных функций, которых нет у более дешевой модели.
Хотя обе версии включают конечные инструменты для 3D-печати, письма и рисования, захвата и вакуумной откачки, образовательная модель также содержит набор для лазерной гравировки, модули Bluetooth и WiFI, джойстики и многое другое. Мы тестировали как раз базовую версию, поэтому пощупать гравер и джойстики нам не удалось.
DOBOT Magician состоит из компонентов промышленного класса, включая шаговый двигатель с высокоточным редуктором и высокопрочный алюминиевый сплав, поверхность которого обработана методом анодного оксидирования.
Чтобы расширить возможности DOBOT Magician, к системе можно подключить различные дополнительные устройства, включая комплект линейного рельса, комплект конвейерной ленты, визуальный комплект и гусеничный робот.

Комплект линейных рельсов эффективно расширяет рабочую зону роботизированной руки(в 350мм), позволяя ей перемещаться на расстояние 1000 мм. Используя массив инструментальных головок и графическую среду программирования, пользователи могут выполнять такие задачи, как написание длинного письма или компоновка предметов.
Конвейерная лента также может быть добавлена к DOBOT Magician для имитации полного производственного процесса. Различные настройки, такие как скорость, расстояние и датчик цвета, могут быть отрегулированы для создания высокоэффективной системы, напоминающей производственную мини-фабрику.
В дополнение к этим аксессуарам компания DOBOT разработала множество приложений и образовательную программу, чтобы оптимизировать процесс обучения с помощью этой роботизированной системы. Более того, пользователи, имеющие под рукой несколько устройств DOBOT Magician, смогут управлять несколькими роботизированными руками с одного устройства, что производитель называет «сотрудничеством нескольких роботов».
Дополнительные расширения:
- Комплект искусственного зрения DOBOT Robot Vision Kit
- Конвейерная лента для DOBOT Magician
- Направляющая рельса для DOBOT Magician
Пример 3D печати
Максимальная рабочая область насадки для 3D печати — 150x150x150мм, печатает DOBOT материалом PLA, с разрешением в 0.1мм.
Нарезка модели производится в программе Repitier Host, с ней ни у кого не должно возникнуть проблем. В целом качество печати для такого устройства нормальное, но при использовании экструдера или гравера присутствует небольшой люфт.
Пример письма и рисования
В режиме письма и рисования в манипулятор устанавливается ручка. Вы можете наносить надписи на разные поверхности, или рисунки. Есть даже библиотека со стандартными рисунками которая позволит вам провести первичные тесты, и также можно загрузить своим материалы. Так как ручка значительно легче чем гравер или экструдер, люфта вы не заметите, в этом режиме устройство работает наиболее точно.

ПО кстати умеет конвертировать любой рисунок в вектор, что очень удобно. Увидеть устройство в действии вы можете в нашем видео обзоре!
Видео обзор
Примеры работы манипулятора
Итог
В этом компактном роботизированном манипуляторе, предназначенном для образовательных целей, собрано множество интересных функций. DOBOT Magician одинаково хорошо покажет себя как в образовательном процессе, так и на рабочем столе энтузиастов. Но нужно понимать и помнить, это не моно устройство, а многофункциональная система позволяющая обучаться как работе с инструментами которыми она оснащена, так и программированию. Конечно о качестве 3д печати на уровне даже самых бюджетных 3д принтеров речи быть не может, но DOBOT Magician на это и не претендует, а со своей задачей, быть многофункциональным роботизированным манипулятором для обучения, DOBOT Magician справляется на все сто!
Подписывайтесь на нас в социальных сетях: ВКонтакте, YouTube, TikTok, Telegram, Instagram, Я.Дзен, Facebook чтобы первыми получать самые интересные материалы!

Здравствуйте! Сегодня мы рассказываем о небольшом настольном многофункциональном роботе манипуляторе DoBot Magician, предназначенном для образования — знакомства с робототехникой, ЧПУ и аддитивными технологиями, основами программирования.
Видео
Небольшой видеообзор даст первое представление об этой роборуке. Подробнее — далее в статье.
DoBot Magician

Характеристики
- Осей: 4
- Загрузка: 500г
- Дальность действия манипулятора: 320мм
- Точность: 0,2 мм
- Соединение: USB / Wi-Fi / Bluetooth
- Питание от сети: 100-240В, 50/60 Гц
- Выход блока питания: 12В/7A
- Потребление максимальное, Ватт: 60
- Рабочие температуры, °C: -10 — +60
- Вес робота без насадок, кг: 3,4
- Вес стандартного набора в упаковке, кг: 7,2
- Вес образовательного набора в упак., кг: 8
- Диаметр подставки: 158мм
- Материалы: Алюминиевый сплав 6061, ABS
- Форм-фактор: Настольный
- 3D-принтер: принт макс., мм: 150 × 150 × 150; материал печати: PLA; разрешение: 0,1мм
- Лазер: мощность: 0,5Вт; длина волны: 405нм; напряжение: 12В; TTL trigger ( With PWM Driver )
- Держатель пера: диаметр инструмента: 10мм
- Вакуумная присоска: диаметр: 20мм, давление -35 кПа
- Захват: пневматический, раскрытие до 27,5мм, сила: 8 Ньютонов
- Цена: 106 120 рублей

Уникальный миниробот имеет открытую аппаратно-программную платформу — он оснащен 13 портами ввода-вывода и может работать с двумя десятками языков программирования.
Благодаря комплекту насадок DOBOT Magician может перемещать объекты, выполнять гравировку лазером и 3D-печать, чертить и рисовать.
Распаковка
Робот приходит в такой коробке:

Внутри еще одна.

А в ней, в транспортировочной пене, коробочки поменьше.

Комплектация

DoBot Magician поставляется в двух вариантах комплектации: Базовый и Образовательный. У нас на обзоре Образовательный набор, базовый отличается от него лишь отсутствием модулей Bluetooth и Wi-Fi, джойстика, лазера и очков для работы с ним.
В комплект поставки образовательного робота манипулятора Dobot Magician входят: механический захват, вакуумная присоска, комплект для 3D-печати, лазер, держатель для ручки. Производитель постоянно расширяет ассортимент доступных насадок и аксессуаров, возможен предварительный заказ слайдера, миниатюрного конвейера и модуля компьютерного зрения. В ближайших планах DoBot — выпуск насадки для фрезерования.
Подробнее:
Сам манипулятор, который имеет слоты подключения периферии на втором сочленении и на задней стенке базы робота. Манипулятор приводится в движение тремя шаговыми двигателями, которые оснащены датчиками обратной связи и редукторами.

Серводвигатель, который выступает в роли четвертой оси робота. На нем можно закрепить вакуумный или механический захват.

Захваты приводятся в движение воздушной помпой.

В качестве рабочего инструмента можно установить лазерную головку. В комплекте, для защиты зрения пользователя, есть специальные очки.

Есть держатель пера, для написания текста или рисования, в него можно установить авторучку, лайнер или карандаш диаметром до 10мм.

Набор для 3D-печати: блок экструдера, подставка под катушку пластика, катушка PLA, тефлоновая трубка, стекло и малярный скотч. Скотч служит для закрепления стекла на столе.

Управлять манипулятором можно не только с компьютера, но и дистанционно, с помощью джойстика подключенного по Bluetooth. Кабель USB нужен для зарядки аккумулятора в джойстике.

Модули Bluetooth и Wi-Fi.

Устройство для автоматической калибровки, запасные винты и шестигранники.

Блок питания, кабель USB для соединения с ПК.

Краткая инструкция.

ПО
Для управления манипулятором надо установить драйвер и программу DoBot Studio, которые можно скачать с официального сайта.
Magician совместим со многими актуальными аппаратными и программными средствами, которые широко используются в робототехнике. Например, заявлена поддержка программной платформы ROS (Robot Operating System) и микроконтроллеров Arduino.
Так выглядит основной экран Dobot Studio.

В основном окне мы видим выбор режимов работы робота, справа располагается панель управления манипулятором, чуть выше находится меню настроек, кнопка экстренной остановки и кнопка «Home», а посередине окно выбора инструмента.
Софт DoBot Studio допускает управление несколькими роботами одновременно. По сути, прямо на столе можно создать имитацию сборочной линии, этому также способствует совокупность технических параметров, среди которых приемлемая повторяемость.
Управление
DoBot Magician гибок в управлении — программировать роборуку и управлять ею в режиме реального времени можно с помощью компьютера, смартфона или планшета. В качестве канала связи используется как Wi-Fi или Bluetooth, так и проводное USB-соединение. Робот может распознавать голосовые команды и жесты.
Режимы программирования
Основным режимом является «Обучение и повторение».

В этом режиме можно создавать управляющие программы, которые робот сможет выполнять единожды или циклично. Обучать робота можно двумя способами:
1.: На втором сочленении располагается кнопка, при нажатии на которую с двигателей снимается ток удержания и, благодаря этому, появляется возможность свободно перемещать манипулятор вручную. После перемещения инструмента и отпускания кнопки, координаты запишутся в таблицу.
2.: Переместить инструмент в нужное положение можно и с помощью панели управления, которая расположена в правой части экрана. Двигать можно как линейно, по осям, так и каждое сочленение поочередно. После перемещения, соответствующая координата сохраняется путем нажатия кнопки “+ Point”.
После записи всех координат и настройки способов движения, нажатием кнопки Play, мы запустим выполнение управляющей программы.
Управляющую программу можно загрузить в память манипулятора, чтобы он выполнял работу в режиме офлайн.
Для отладки существует кнопка Step Run, позволяющая запустить программу пошагово, чтобы убедиться в правильности движения.
Два следующих режима, «Блочное программирование» и «Скрипт», созданы для более глубокого изучения программирования и робототехники. В них возможно создание гораздо более сложных алгоритмов поведения, добавление условий выполнения различных сценариев.
Для начинающих, которые еще плохо знакомы с языками программирования, отлично подойдет режим Блочного программирования. Вместо запоминания сложных синтаксических форм и обозначений здесь используются блоки обозначающие условия, циклы, функции, математические преобразования. Тело программы выстраивается путем вставки одних блоков в другие.

Для продвинутых пользователей существует режим «Скрипты», где они смогут использовать весь потенциал этого робота, используя язык программирования Python.

Режимы работы
Для того, чтобы оценить максимально возможную область перемещения инструмента “живьем”, можно воспользоваться функцией управления манипулятором с помощью «мыши».

Следующий режим — «Рисование». В качестве инструмента на манипулятор, в специальный подпружиненный держатель, устанавливается ручка.

Можно создать надпись, вставить рисунок из встроенной библиотеки или добавить собственный.

Контуры воспроизводятся с высокой точностью.

Лазерный гравер. С помощью лазера можно выжигать или гравировать изображения.

Из настроек доступны «Диапазон оттенков серого», минимальная и максимальная мощность, в общих настройках можно отрегулировать скорость и ускорение.

Обработке поддаются многие материалы, такие как дерево, кожа, бумага, картон, акрил.

3D-печать. Для того, чтобы перейти к подготовке файла для печати, потребуется загрузка новой прошивки. При нажатии на кнопку “3D-печать” в главном меню, программа сама предложит изменить прошивку, вам просто нужно дождаться окончания загрузки и установки.

После этого откроется довольно привычное многим 3D-печатникам окно программы Repitier Host.
Здесь мы вбиваем параметры принтера, подгружаем профили печати и можно приступать к слайсингу.

Представленные ниже детали печатались на скорости всего 4 мм/с, поэтому печать заняла около 14 часов. Это стандартное значение скорости, взятое из родного профиля. Для облегчения веса экструдера, двигатель подачи пластика вынесен отдельно на платформу держателя катушки. Из-за этого приходится сокращать или вовсе убирать ретракты в настройках слайсера.

Вот так происходит печать.
К сожалению, из-за специфики строения аппарата, манипулятор имеет значительный люфт на инструменте. Это не мешает точному позиционированию при малых значениях ускорений и при использовании вакуумного или механического захвата. При использовании лазерного модуля и хотэнда, которые имеют немалый вес, этот люфт становится заметен.
Режим ручного управления. Управляя роботом с помощью джойстика, можно совершенствовать свои навыки в управлении подобным устройством и просто весело проводить время.
Если требуется более глубокое понимание принципов работы роботов манипуляторов и их сфер применения, то, с помощью второго DoBot, конвейера, инфракрасного и цветового датчика можно собрать небольшую производственную линию.
Для их синхронизации и запуска потребуется подключить оба робота к одному компьютеру и открыть два окна Dobot Studio, в которые загружаются исполняемые программы, которые скачиваются с сайта производителя, для каждого отдельного робота. Перед первым запуском систему нужно откалибровать, для этого в программе есть специальные переменные, которые можно изменять.

Правый манипулятор, по заданному алгоритму и с заданной периодичностью, выкладывает кубики на конвейерную ленту, а левый манипулятор регистрирует наличие кубика на ленте (с помощью инфракрасного датчика), определяет его цвет (с помощью цветового датчика) и помещает кубик в соответствующую стопку.
Назначение
Пример применения DoBot компанией Volkswagen.
DoBot Magician отлично подойдет для обучения детей. Учебный процесс с его участием может начинаться с простейшей игровой формы, благодаря наличию джойстика. Следующий шаг — основы программирования, сначала в блочном редакторе, а потом и скрипты.
Столь наглядное и интерактивное обучение намного эффективнее работы с “сухим” кодом, особенно в самом начале.
Учитывая интересы более продвинутых потенциальных пользователей, разработчики предусмотрели возможность подключения разнообразной периферии, которая не поставляется в комплекте. Это могут быть всевозможные датчики, сервоприводы и шаговые двигатели, светодиодные приборы и множество других электронных устройств, включая микрокомпьютеры и микроконтроллерные платформы, такие как Arduino. Учитывая это, можно рекомендовать DoBot Magician не только школам, но и техникумам, и вузам, как исключительно удачное наглядное пособие.
Уже сегодня этот миниробот используется как одно из основных средств STEM-обучения в ведущих китайских вузах — Университете Цинхуа и Шаньдунском политехе, а также в Австралии — в Сиднейском технологическом университете.
Выводы
Рассматривать качество работы DoBot Magician в сравнении с обычным 3D-принтером или лазерным гравером нельзя. Он никогда не даст качество 3D-печати сравнимое даже с бюджетными принтерами, но это естественно: это не принтер и не гравер, это совершенно другой аппарат, с иными задачами, которые он выполняет отлично.
Если вы работаете в сфере образования и ищете максимально эффективные средства обучения, обратитесь в Top 3D Shop — наши сотрудники подберут оптимальное для выполнения ваших задач оборудование.
Хотите больше интересных новостей из мира 3D-технологий?
Подписывайтесь на нас в соц. сетях:




Автор: Top3DShop
Источник